 مرجع مهندسی كنترل | دانش با کیفیت در مرز علم
مرجع مهندسی كنترل | دانش با کیفیت در مرز علم
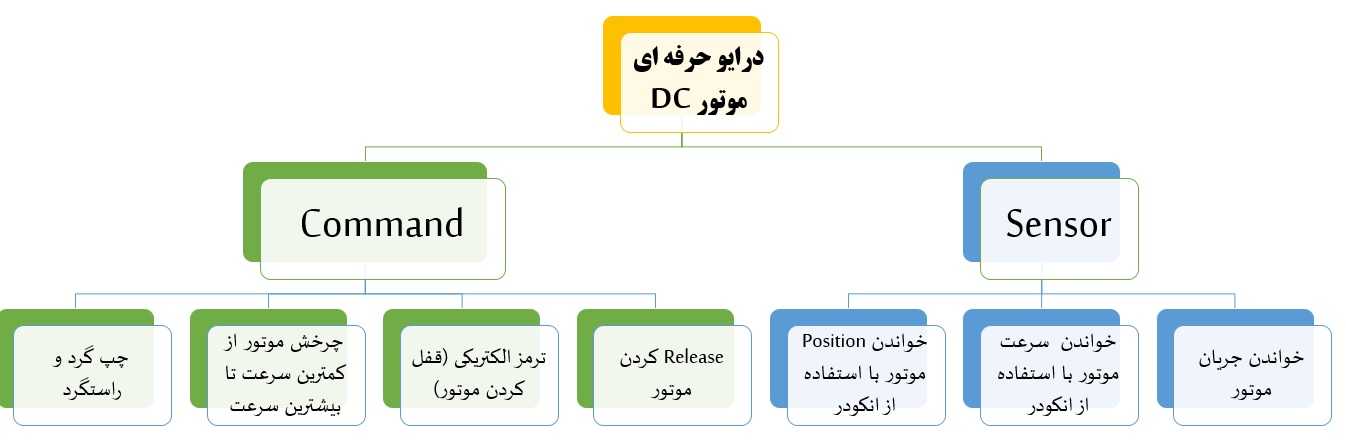
در بسیاری از کارهای تحقیقاتی و صنعتی موتورهای DC نقش عمده ای دارند. در مباحث رباتیک و یا مکانیزمهای گوناگون، کنترل کردن موتورهای دی سی اهمیت زیادی پیدا میکند. کنترل کردن موتورهای DC را میتوان به سه زیر بخش تقسیم کرد.
#کنترل کردن موقعیت موتور: که با دادن Position دلخواه توسط کاربر، موتور به موقعیت خواسته شده برود.
#کنترل کردن سرعت موتور: که در این مورد هدف کنترلی، رسیدن به یک سرعت دلخواه است.
#کنترل کردن گشتاور موتور: که در این خصوص نیز با استفاده از فیدبک جریان و در برخی موارد استفاده از سنسور نیرو این کار انجام میشود.
البته در کارهای پیشرفته تر گاها کنترل کردن دو یا چند متغیر مثلا سرعت و position و یا سرعت و گشتاور میتواند مورد توجه قرار گیرد.
در تمامی موارد بالا به عنوان مقدمه ما باید قادر باشیم دو کار عمده را تواما انجام دهیم. دادن فرامین مختلف به عنوان Command به موتور و همچنین گرفتن feedback های مختلف مانند جریان، موقعیت و سرعت از موتور. در مجموعه آموزشی حاضر، موارد فوق مورد توجه قرار گرفته شده است.
در ادامه فهرست کلی مطالبی که در این پک آموزشی ارائه شده است، تقدیم میگردد.
سعی کرده ایم مطالب را به صورت کاملا عملی و به ساده ترین شکل بیان کنیم تا همه دوستان بتوانند استفاده کافی را ببرند.
مباحثی که به عنوان پیش نیاز برای این مجموعه آموزشی لازم است که فرا گرفته باشید:
“آموزش کاربردی آردوینو – ورودی و خروجی دیجیتال”
“آموزش کاربردی آردوینو – ورودی و خروجی آنالوگ”
“آموزش کاربردی آردوینو – ارتباط سریال”
لازم به ذکر است که تمامی پیش نیازهای فوق در همین سایت ارائه شده است.
در پایان بسیار خوشحال میشویم که با نظرات بسیار ارزشمند خود ما را در این راه یاری بفرمایید. هم چنین در صورتی که می خواهید با نحوه “اتصال برد آردوینو به سیمولینک متلب” آشنا شوید می توانید از آموزش مربوط به آن استفاده کنید.
جلسه اول[رایگان]:
بیان فهرست کلی مطالب، سخت افزارهای مورد نیاز، آماده سازی اولیه موتور و درایو
جلسه دوم:
راه اندازی تنظیمات درایو در محیط برنامه نویسی آردوینو، حرکت چپ گرد و راستگرد، حرکت موتور با سرعت متغیر
جلسه سوم:
رفع مشکل نویز، مانیتورینگ آنلاین ورودی اعمال شده به موتور، نوشتن تابع Command دو جهته برای موتور
جلسه چهارم:
دریافت Command موتور به صورت عدد صحیح از کاربر و اعمال آن به موتور، شروع به ایجاد Command شتاب دار
جلسه پنجم:
اعمال Command شتاب دار به موتور، قفل موتور
جلسه ششم:
برنامه ای برای اعمال انواع Command ها به موتور، شامل: حرکت شتاب دار، ترمز و Release، شروع تنظیمات مربوط به خواندن جریان موتور
جلسه هفتم:
مانیتور کردن جریان موتور در حالتهای مختلف شامل: چرخش، تغییر جهت، قفل و Release
جلسه هشتم:
مقدمه انکودر شامل ساختار، نحوه عملکرد و استخراج پایه های انکودر موتور مورد استفاده
جلسه نهم:
اتصال سخت افزاری انکودر به آردوینو، نوشتن اولین مثال برای خواندن انکودر
جلسه دهم:
نمایش Position موتور بر حسب درجه با سه رقم اعشار، صفر کردن انکودر در مکان دلخواه
جلسه یازدهم:
گرفتن فیدبک از Position موتور بر حسب درجه با سه رقم اعشار، مانیتور کردن جریان موتور به صورت همزمان در حضور دادن Command به موتور
جلسه دوازدهم:
بررسی محدودیت خواندن انکودر با افزایش سرعت موتور
جلسه سیزدهم:
راه اندازی آردوینوی DUE برای رفع مشکل محدودیت خواندن انکودر
جلسه چهاردهم:
حل مشکل محدودیت خواندن انکودر به طور کامل و تست آن با استفاده از آردوینوی DUE
جلسه پانزدهم:
مانیتورینگ سرعت موتور به RPM
- لینک دانلود فایل بلافاصله بعد از پرداخت وجه به نمایش در خواهد آمد.
- همچنین لینک دانلود به ایمیل شما ارسال خواهد شد به همین دلیل ایمیل خود را به دقت وارد نمایید.
- ممکن است ایمیل ارسالی به پوشه اسپم یا Bulk ایمیل شما ارسال شده باشد.
- در صورتی که به هر دلیلی موفق به دانلود فایل مورد نظر نشدید با ما تماس بگیرید.



وحید خزاعی پور
سلام
دکتر با آردینو امکان کنترل شتاب موتور dc وجود داره ؟
ممنون میشم راهنماییم کنید
دکتر حامد حقیقی
سلام
بله این امکان وجود داره.
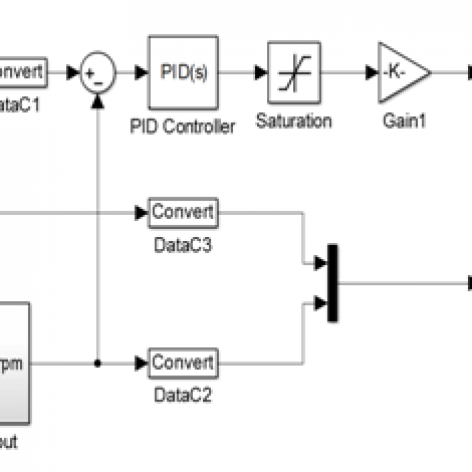
در آموزش ما از موقعیت و سرعت فیدبک گرفتیم. به همان صورت میشه سرعت رو هم فیدبک گرفت و در صورت لزوم برای مباحث کنترلی از اون استفاده کرد.
در صورت نیاز به راهنمایی بیشتر، برای ارتباط با بنده با مدیر سایت هماهنگی بفرمایید
موفق باشید
امیر
سلام.
آیا آردینو قابلیت انجام پروژه هایی که با گوشی قابل کنترل باشند را دارند؟و آیا آموزشی تو این زمینه دارید؟
2 امکانش هست آموزش انجام پروژه های مختلف رو تهیه کنید تا به صورت عملی هم کار کنیم و تو چند قسمت بتونیم یه چیز عملی و مفید درست کنیم
حامد حقیقی
@امیر,
سلام خدمت شما
۱ – بله این امکان وجود دارد.
۲ – با توجه به آموزش های ارائه شده میتوانید کارهای عملی و مفید انجام دهید.
۳ – مطالبی در آینده ارائه خواهد شد که انشاالله جذاب تر خواهند بود
محمد عبداله زاده
ممنون و متشکر ازتوضیحاتتون اقای دکتر من فیلم های شما رو دنبال می کنم اقای دکتر ببخشید ولی بی زحمت وقت کردید موتور های دیگه نظیر سروو موتور رو هم بررسی کنید واگه بتونید مثل مصرفکننده های پر قدرت که مدارشون می بستید این جا ی پل H ببندید و یا با IC هایtda ی درایور درست کنید خیلی عالی میشه ممنون از لطف و اموزش های خوبتون
حامد حقیقی
@محمد عبداله زاده,
سلام
بسیار خوشحال هستم که آموزش ها نظر شما رو جلب کرده.
متشکر از پیشنهادتون. انشاالله در آینده اقداماتی رو در مورد پیشنهادات شما انجام خواهم داد.
محمد عبداله زاده
سلام اقای دکتر ممنون بابت اموزش های خوبتون فقط ی در خواست دارم ای کاش شمانیک این درایور هم توضیح میدادین قطعات که روشه و همچنین اگه بتونید توضیح بدین شماتیک ممنون میشم باز هماز اموزش های خوبتون ممنونم
حامد حقیقی
@محمد عبداله زاده,
سلام بر دوست عزیز
با توجه به اینکه فلسفه آردوینو انجام پرتو تایپ به صورت سریع هستش، لذا شیلدها هم با این رویکرد ساخته شدن به کار گیری میشن..
یعنی به طور خلاصه با جزئیات درایو اینجا کاری نداریم..
اما در مورد فرمایش شما.. با توجه به اوپن سورس بودن شیلدها و بردهای آردوینو به راحتی با یک جستجوی ساده میتوانید هم شماتیک و هم pcb رو داشته باشید.
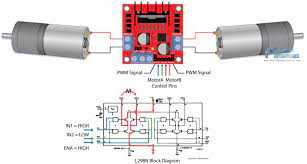
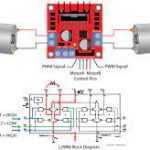
اما نکته ای که شاید بتونه قسمتی از ابهام ذهنتون رو حل کنه، اینه که تقریبا همه درایوهای موتور dc از یک پل h برای کنترل موتور استفاده میکنن.. لطفا تصویر لینک ذیل رو مشاهده بفرمایید:
data:image/jpeg;base64,/9j/4AAQSkZJRgABAQAAAQABAAD/2wCEAAkGBw8PEA4OEA8PDxAWDxAQFQ8QEA8VFw8VFhUWFxUVGBUYHSggGBolHRcYITEhJykrLi4uFx8zODMsOCgtLi4BCgoKBQUFDgUFDisZExkrKysrKysrKysrKysrKysrKysrKysrKysrKysrKysrKysrKysrKysrKysrKysrKysrK//AABEIANAA8gMBIgACEQEDEQH/xAAbAAEAAgMBAQAAAAAAAAAAAAAABAUBAgMGB//EAEcQAAIBAwIDAwUMBwcEAwAAAAECAwAEERIhBRMxIkFRBhVUYXEUIzI0U3SBkZKU0dMzUnKTsbLSFiRCQ6GzwURigqOi1PH/xAAUAQEAAAAAAAAAAAAAAAAAAAAA/8QAFBEBAAAAAAAAAAAAAAAAAAAAAP/aAAwDAQACEQMRAD8A+41is0oFKUoFKUoFYrNKBSlKBSlKDFZpSg0lUlWAbSSCAwAJU9xwdtqpOA20dubg85wObMWWWUsDpK6pcscjrvjA3G1X1U9pZrLzNWezeyOMHGcHofFT3igt6zUHh9i8Ry0zy9nGGL+rftMfD/U9dsTqDFKzSgUpSgVis0oFKUoFYrNKBSlKBSlKBSlKBSlKBSlQOLs+mJUkaItMiF0EZYA5JxrUju8KCfSq3zbL6dd/ZsvyaebZfTrv7Nl+TQWVKrfNsvp139my/JqJw61nkWQtfXW080Ywtl0Vyo/yfAUF7Sq3zbL6dd/ZsvyaebZfTrv7Nl+TQWVKrfNsvp139my/Jp5tl9Ou/s2X5NBZVA4R/wBR85l/iK082y+nXf2bL8mucPB3TVpvbsamLnaz3J6n9DQW1KrfNsvp139my/Jp5tl9Ou/s2X5NBZUqt82y+nXf2bL8mnm2X067+zZfk0FlSqO5tZ1lgjF9dYfmZ7Nl/hXI/wAmpXm2X067+zZfk0FlSq3zbL6dd/ZsvyaebZfTrv7Nl+TQWVKruGXo5NuZZQZHUDLlFMjbDOBgZJI6DqR41YZoM0rVnA6kDcDcgbkgAfWQPprWSZF+Eyr2WbcgdlfhH2DxoOlK4i7iK8wSJoyRr1LjI2Iz41sJkyV1LqGcrkZGACdvYy/aHjQdKUpQKUpQKUpQKpPKG9CmGGMcy51CaOD4PNCbMC57Kdep+o1d15jytbWyW+oThoyx4cgxLOM4180AmNR0B7A1Yy4oPSxkkAkaTgZGc4PeM99bVztxhEGkr2V7LHJXboTk5I8cmulAqj4bxOGMTo74YXVxkaXPWRj3Cryq3gfwJvndz/utQH45aqCxlAABJJVwAB1JONhVjUHj3xS7+bTfyNU2PoPYKDalKUClKUClKUHOeZY1aR2CooLMx6ADqah+erb5T/4P+FOPfFp/2DVhQUz38Utzaqj6iOccYYbaPWKuarr74zZ+2f8AkqxoFcL6SRI3aKMTSAZWIuE1nw1EECu9QeORB7eZDC9wCuOSkgjaTcbB9S4+v6+lBV8Mghuoo4+Y+u3PLkCqFKv2WZMkE42HwW3HfWl35JBwwFwd45Fy8UTtmRssxOACMbBcYHXGd6k+SsxZJYzOkhRwvICaHtBpBET5VS224JRcgjr1N5QeNjg4czNqmlTE2e20RBfUCBkAnIKLsx1DUufhDPW3t+HxBgJpCDCYDkKSEnKDVkJlR2164A3JHU16N+HQEgmJCQAM6R0BJA9mSTWnmi2+QjO+d1Bydtz4nbr1oIC8NtbhmKPIAo0sijSAxJJJ1Lq17bjP0b1veeT0cmr3yUAlSQ2iQDHLye2CSSI1G5OPCrS3t0jBCKFBOTjvPeT4n111oMKuAAO4Y61is1mg0WRSWAYEqQGAIJUkAgEdxwQfpFb152LhkVnG5mu5Ej5xIla4ZdRlcYDk7Fy7ac9+1TksYyzxi4uSyhSy8+Ts6s6frwaCzrVZFOMMDkahgjcbbjxG4+sVCPCVOxluSO8Gd8EeBrRuGNvpcKQdKED4ERzqX29o47uynhQWKsCAQQQRkEbgioHF0BNqSASLlMEgZXIYHB7ttqwOF7kc2RIwewkTsmkHds467k48ABWJODI2nM1ydLBh7++xHQ0FnVfNxEl2igjM0i7MdQWOIkZAeTffGDpUMRkEgAg1F4raNFDK6T3GvThMykjW3ZTPq1EV2teCJEixpNcgDP8AmnLEklmJxuSSST3kmg2NzeLu1tCw71huSz+wCSNFP0sK5+TdwskczLn41cgqysrKeY2zKdweh37iD0Nee88WVsJpLziLwt7oeLBkwdInliiJAGSMAAtjA07nYmpvk/JGGinglE0c9zdwmRXVxNhpZY5NY2bGh1yP1/UMBd8f+KXfzaf+RqmR/BX2D+FU/lddSR2s2iFpVaGZXKFdS5jIXSpOXJYgYG+/Q1K4HxSO6i5kYcAEJ2wu/ZVsggkEYYd/XI7qCwrWWRUBZiFUdSa3rjd26yo0bdGGDsp/0YEH2EEUFbxK1M7QyRTxodD6GwGO46rv7OmD4kjaoFxDd81lFymWYlV5pXZhkALnohOfWCAcjap/9nLc51a2+DuSmQRp3DAZB7I79ugwK1/szb5VsvkFiCOWO0WD52UDqAcdNum5yEOfh86KqycRKsVADOcdsOp1gAgHxwcjcL0qdw+0eJxLJc8xdJjXUx/xmPSuehIxgNjLa9+lbpwOMRrGXbAEitp0gOkhGqM5BIXACjByAoGa4t5L2575Oir1XoG1YzjPwt89R0BA2oJXHz/dZz17H/Iqxry3lE7WVryUhklg5cuqRSjOrtIpRdGxbUXbp00+ur7hl+lzGJUDBSWHa09xxkEEgj1g0ELjN2Ip7PsvI5M+mOMAs/Y9eAB07TEAZGSMiu3Pveot7cDuDXUgOPXiEgH2E+2qDiF1bo6Xt1cC2U3F1FzWkWPQkOuNI1Y9QxVnx1Jf1CsWV9bXU1q9pfSTLKE1BX7Qj5Vw6ZyMpllHZIB7NB6W04gHcxOjQzaS3LfHbUEAsjDZ1yRnG41LkDIqbVFxnhGYXkWa4MsYaaImU7OqtjfGwIJU+pjUyKwDKrCe5wQGHvp6Hcd1A4AgFtDgAZXUcADJJJJ9pNT2YDqQNwN/E9BVdDwZEUIstyFAwBz32rJ4Wc45rsmNS62LMknRXBPh4eO9BPMi79obEKdxsTjAPrOR9YreqwcLzgOwKsC0oXI1yb4YHuA1H1jQnhW/mofLXP796CwrTmLq0ahqwW05GSAQCceG4+uoXmofLXP796jTcD1TW0nOm0xO0m8rlnbSVCb7aMEkjvwKC4rNKUFJ5R8Ie8MMRKC3CztJqBbWzRmJUKZGV0ySnc7FU2PdO4RDIkMfP0G45aJLIoHvrIMavYdzju1VNpQKUpQcprhEXUzKozjJPf4e2kVwjgMrqwJIBVgQSOo/0NeaVrWFjCGuOetxgMqoPfDGigqp7BBEgTUw66snYmuF5FYtkOlyB2lYaohrZp9LKdR7ZDucsMjA6nvD0vE4edDLGrqGZOwx3Cv1jY+rUAforPC79LiJZU2yN1yMxtjdTjvH1HYjYg15+S0tHJcQT5F1voa3HbciIjGr4PZx9OR41dHg8Y0mN5IHVFj5sZXLKowodWBV8DoSCRk4xk0FRHafGLebh5uk90yT5/u5Vi00kkeRK4yQCvQbe0VLs70Xc0YWN4xbSSmRW0ZSXS0SR9glT2HZ8A7Ax/rVMbh8rbPdzae8RrEhYeBYLqHtUqa5+TkCRxSIgCqLq62HrlYkk95JJJPUk0GfKeBZLS51ahpiaVSruhV4xrRgVIOzKD9FS+HWqQxJGmrSMntO7nLEsxLMSTuT31x4/wDFLv5tP/I1TYxsvsFBtSlKBSlKBSlKCo8qLZXt2Yl1aM8xGjkljKtgrnKEHozDHrqxs7ZIY44YwQiIqKCzNhVGAMsSTsO+ovHx/dp/2P8AkVYUHnTdLCz2EkDXBkknlSP3kiWKRjJITzGCkK7lCNyMoSO0K1tbY8+1SOyNrFAqkajFgJy50CKI2YYBZdtutTeM2iTTWauDs0zKysysjCMjUrLgqcEjI7iR312FjONheS48THblh7DoA+sGgxxyb3swIffpg0SAdVyMNIf+1AdR9gHVgDYIgUBRsAAAPACo1nw9Iiz5Z5GADTSHU7AdBnoq9TpUAZJ23NS6BSlKBSlKCo8rYTJZXKBDJmPBQRmTUMjI5Y3fbPZ7+lVvknwtFMrCIpEtzz4P7vJahWaERSBbdt1Xqc4AYuxxnJPqaUClKUGKzWKzQKUpQR5LGFizNFGzHALFFJbGcZON/hH6zWF4fACCIYgRjBCLkYII7vEA/RUmsUHFLOIFiI0BZgxIVe0wOoMfXnfPjXelKDFVnBHAWbcfG7nvHyrVaVScM4ZbyCd5LeF2N1cZZ4o2JxIwGSRmglcekX3Jd7j4tP3j9Rqnx9B7BULzLaei237iL8Kn0ClVl1NcNOYYXhjCwpITJC8hYszjAxIuMafX1rPIvvSbX7nL/wDYoOl5fMriGJObMVDlS2lIkJIDO2CQCQQAASSD3Akc5bi6iGt4o5kG7cgvzFHeVjIPMx1wCDtsCcCoVtFKRxOF3RrhsMpVSgKPbqkZALMVXWkg6ncMe+nAuGTwyl5WJVbdbZMyM2Ujb3tmB/xkFtTd+3hQXkMququjB0ZQyspBDKRkEHvBFb15/g0V20QeKe3WJpJ5Ig1tI55Tyu0XaEygjQVI2GBgVLljvlVm90WmwJ+Jzdw+cUHXj/xaf9g1O5i/rD6xXC2YTQxl1Uh4lLIRlTqUEjB6jeuPmW09Ftv3MX4UHO9YG5s8EHefv/7Ks6ppLCCK5tWihijJ5wJSNFJGjpkDpVzQKUpQKUpQKUpQKVis0ClYrNApSlApSlApSlApSlAqj4bBMwnKT6F91XGF5Stj3xu8mryq7gvwZvnVz/utQZ9y3PpX/pT8ae5bn0r/ANKfjVhSgqLGORbubXJzD7mgwdAXHvk3hVvVZOsqXDSpEZVaFI9nRSpV3O+r9ofVXaO6mJwbZ1HjzIj/AANBte2CylX1PHIuQs0ZAZQcahuCGU4HZYEZAOMgER5OFtKNM1xJLHjeICNFkHg+kZYeIyARkEEbVL50nyLfbT8ag8NkYBMRlv7tbdGUY2bxoLUVzufgP+w38K5PcSgEiBifDXHv/rUeW6uCrD3I+6kfpYe8e2gj8KtbjkW+LnHvMX+Sn6o9dSvctz6V/wClPxqTYRFIokbGVjRTjxCgGu9BTPDKtzal5uYPfsDlquDo65FXNV978YtPbN/JVhQKUpQKUpQKUpQKUpQKUpQKVznmVFLscAY7icknAAA3JJIAA3JNRxxODb31Mk4Ck4bPa7JU7g9ltsZ7JoJlKje74OvOi6Fv0idAdJPXpnb20a/iBUasliyjSrH4LaTnA2Gdsnagk0qNHfwsQqyxsdsAOpznVjG+/wAFvsmpNApSuN1dxQrqlkSNchdTsFBJ6AZ6n1UHaqDhvC45ee7NcAm6udku7uNdpGGyo4UfQKsBxm2yAZQmSAOYGj1E9ApcDUfZWvBB2JvnVz/utQQuL8Jjjt7iRJLsMsErKfd19sQhIO8njV4h2HsFQuPfFLv5tN/I1TY+g9goNq5mdAwjLqHIJCFhqIHUgdSK6VQ8bgheQxtM0byR6sFVK5RXAYkjOBk5GcbDONR1BehhkjIyMZGemelcoYUjwBt2UjGT1Cg4HtxmvO+bbMM+LvSWaMEB4hhgigYGNmwvXuUkbCutrb2SSpOt2uFDlU1x6QrZbu/wjtY8Mtv3ALuO+hbJWWJgM5KuhxjGeh7sj6xXdWBAIIIO4I768u3DrPTGj3Z97Tlgl0yUcJpQ6s7FlRgBjJQbdRXo7OJUjjRTqVUVQ2QcgDY7UEfjbstvOVYqdBwynBHrB7jWnmhPlbr71cf1Vnj/AMWn/YNWFBSyWKxXNoweZsmYYkmlcfoyejEjO3Wrqq6/OJ7MnYapv9tqyON2p3E6Mv66nUg9rjsj66CwrlNcIg1MyqM4yT3+HtrMEySKroyuhGQ6MGDDxBGxrzjyWkLmJPdCSi4CqU07yGKNQyhuwdQYJqYdS3TGQHo4p0caldWGSMqQQSOoz9Fbax4ju7x39K8fdxWRyWS6Hw0K6oRrdpyrqdTdpg7nLdMDqe/s1tauWdbe5+NblGthl2PKIxr+ANOPp2oPVRuGAZSGUgEEHIIO4INbVzt4RGiRrnSqqgz4AYFdKBSlKBSlKDlcQLIpRs4yp2JBBUhlII7wQD9FUHF7O1tV5rpNLqkl2VmOnVEzSk/tCI5J7yOgqzteN20uorNHpDlAxdAHx1K75K5yM9+DjIwa6vf2x6zQH2yRnuI8fAkfTQUTtw3dMyEl1jO83aMfZC5/xYBxjfIHfW4ueHsgHvoSMkZAm33WTB07k6iAO/IIHU5s2msVy2bXbU2xizk9SPWcD6hWY2tcx+9Ip5bOMxoOWMbqf1TgNt/2N4UHOHyetVMbiMkqQV1MTg6tecHv1YOfUKtqiLxGHSrs6x6gcCRlU7HBBB7wdqHiVv8ALw/vU/Gg63tysMckrZ0ojOQBkkKM4A7zUXh1gVPPmAe5YdpuoiBwTFHnogwBtjVjJ3qJxzidubeYieFiqiTSssZL6CH0gZ3zpx9NTl4vakAi5gIIBB5se4+uggQ3t1OZ9FvA8OuSIc6dk1aHeN9hEwIOnO/jj11z4DbS2bCCTQscrzyRojFlt31FuSrFVLKU7QGOyUcdNIFTbwwzx3iDiclqZJroZglijKD3RNh1dgc58Qe7xrt5MwskXDbY3Ju2hnuvf205kiiWWHVtnvljHUn1negvPKOdVtrhCcM9vcBRvlsRsT/+1YxfBX2D+FU3llZLNaTaoYZtCmQrMOqDeVVbSSjMmpQwGRqzXXyX4SLS3EelFZmLsEJK5wFXGQN9CrnAGTk43oLeq/i9vFoeaRNehG21soIwfhYONsk6iOzkkVYUoPINdWEbBXVi41yYjn1x9gaGTWzDIxglSBk4zk1ma/4fiVlgZisigjWF1MANJXt75DZ2HrOOteraNTjKg4ORkDYjOCPrP11tigoOG+4pJBHHAwK5bOoFQYyoVjhz2snA2yBnOAd76NAoCgYAAAHgB0ralBVeUdwghkiJ7bROyrvkhSuo+wah9Yq1rzvlvwxJ7cFoIJwhywlOluWd2WOQKxQlgmcDcKRVjwDh3uW3ihwoYDL6M6S7buVGBgFiTjG2aCs4haS3kySqkUsEEskYglcokzhSryMQjatLdgIRjKsTk6cTEv7lZ4opoYkjk7CtFKz4cJK5yWRcbRjb1157jlk9xDHZrevw8+c7lpJYSofGuS4RQxxpLK6NkePeMipj8qK7sib5rjDBTzWh7I5Fz2tSKq5P/FBb8SgFvrvIhpx250XYTRj4bkD/ADFUZB6nTpOxGJz2MLFmaKJiwGWKKS2NWMnG/wAJvtHxqHxfikC287c2JvenwnMTtkggKN+pJA+mu1teQIiIZ4iVRVzzE3wMZ60HVeHwAgiGIEYwRGmRggju7iAfoFbJaRAkiOMEtrJCLu2dWo+vO+fGtPONv8vD+8T8aw/EYQusOrjUFOghsZ7zjuAyT6gaCXSocnEY15pOrsFQcDOc948RnI/8T4Vt5yt/l4f3qfjQSqVF85W/y8P7xPxri3GbcSRRc1CZCVVg6EFuoTY7MRkjxwaCwpSlB529ubWxMi+55HTQ90+hImWBM9ohSQxGQTpUMck4G4FXnuWP5NPsLVNx/wAnfdUnM1W36BocT2vOKZbOpDrXS30HoPCryGPSqrkthQupjknAxknvNBqLaPry0+ytcX4dGQ4IOGcOdz17wPBTvkd+tvGpdKCMLKPU7lAzMRnUAcYHQZ6d59pNROKW0YNvhEH95j/wr4NVpXnPLCd0VAxEVvkE3EbZnjcHs8uLI1HwxrJPZ5bA0F/7nT9RfsiqtbB7cnkxxywkluS2FaHOSRGxGGXPRGxjJw2MKLS3OUQ5ZuyvaddLHbqy4GD4jA9grpQUyvISxTh7I7Yy08lsE22G8buR9C1r5MWfLW4kYhpWuJwzqpVcLI+FVSTpUZJxnqxPfV3VbwI9if53df7rUG/H/il382n/AJGqZF8FfYKh8e+KXfzab+Rqmx9B7BQbUpSgUpSgUpSgr/KD4rP+x/yKsKr+PfFp/wBg1YUFBxyxJubSWIRmTMiskudEoWNiAcfBYZOHwcBjsa6ZIYseGSltIQlGsyhAJO2qUEjJO5UGpd/+ns/25v8AbarCgqIuFmV0lnjhRUOpLeMBhq3AeR8DUQDsoGAST2iFIsfckXycf2FrtUPjDhYJiZJogI2PMgj5kibfCRNLam9Wk0EbgdtHyT72n6e5/wAK/LyVM9wxategA6SpAAAIPiO89R/5Hxqt8lJpGhOVj5IPvUqy6mlyWLl1DOAc755jFsnIXpXaDj0DDLa4m1onLdDq1OpZAVXOCQDsd/oIJCXFYRryiMkoGAJJOdXUt4nrv6z4109yx/Jp9har18o7Q6ffT2lVlBimBYElRgFd9xjHcetI/KK0ZtPMOSwVexJ2yVVhpwN86gPWcigsPcsfyafYWogtrWSfYxNLBgmJShMLOOy7INwxXOCe4nHWplrOJY45VBCuiuAwwQGGRkdx3rznBOEXkNwt1I0Tc4T86NI9LR625kOqTWRLywDEMAbPnuoPUUpSgUpSgUpSgV57ygtmae3aNBDIVaJeIKctCSciMxZGtTjPayoI3Br0NVnHZkjWB3ZUQXEZLuQqqNxuTsOtBYxggAEliAAWIA1Hx22raq3z/Y+mWn3iH8aef7H0y0+8Q/1UFlVFwuCcicpOEX3Xc9kxBse+NnfNS/P9j6ZafeIfxqBwbjlmqzaru2Gbm4IzPEMgyMQevSgmXfDriWOSJroaXRkOIFzhgQcb9d6tAMbVXef7H0y0+8Q/jTz/AGPplp94h/GgsqVW+f7H0y0+8Q/jTz/Y+mWn3iH8aCypVb5/sfTLT7xD+NB5QWPptp94h/qoLKlVvn+x9MtPvEP408/2Pplp94h/GglX9tzopItRXUpXUADp9eDUf3Lc+lL+4X+qtfP9j6ZafeIfxp5/sfTLT7xD+NBwkhmW4tDJMJBqmwBGFweWd85NXNefveO2RmtSLu1IDS5PPiwMxkDO+1Tf7Q2Pptp94h/qoLOuN3G7xuiSGJypCyqqsUPcwVgQfpqF/aGx9NtPvEP9VP7Q2Pptp94h/qoIvkvDj3S5hAYy6GutRLXhjLIWKsSyAEEBSSOuMCobNiMiSwTdZDGI4dJG6qQdBJGQ2c5UkKw0jG9v5POGgDKQymW5YMDkMDNIQQe8EHOa5cTjvebzIGUxiNRymx2nxNk5z4mLb1dRvkKpFWHDLZD9BAxiMTu0mA4wjEkIEHcRk5xsSM9/dqElRw3LdzcsctgSsbEPo6YZT0yVzt2TiRzeJbnlRHCoQMqNROnUPhbY339uB0rvw832pFl0aQBrbSuWOk/Bw3ecE7DHcD1AWVvjQmldC6VwmANAxsuO7HhXSlKBSlKDFZpSgUpSgUpSgUpSgUpSgUpSgUpSgVA4T/1HzmX+IqfUDhH/AFHzmX+IoJ9KUoFKUoFKUoFKUoFKUoFKUoFKUoFKUoFKUoFKUoFKUoFKUoFKUoFKUoFKUoFQOEf9R85l/iK68QllRNUUayHO6s7Lt6sKcmqLgHFJpWkWNLd1MrSMy3Bblhj07KHfY4zjOKD09KUoFKUoFKUoFKUoFKUoFKUoFKUoFKUoP//Z
موفق باشید