 مرجع مهندسی كنترل | دانش با کیفیت در مرز علم
مرجع مهندسی كنترل | دانش با کیفیت در مرز علم
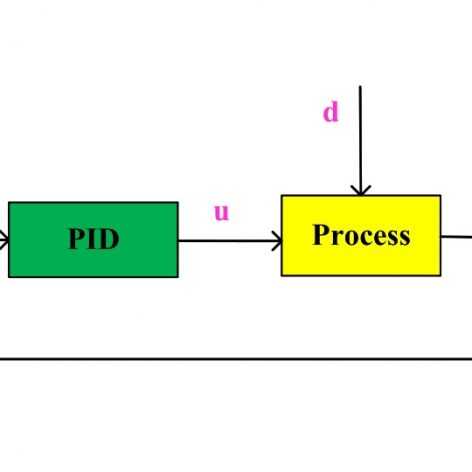
کنترل تناسبی-انتگرالی مشتقی یا PID یکی از اولین و رایجترین کنترل کننده های مورد استفاده در صنعت است. با توجه به خواص…

تاخیر زمانی در بسیاری از سیستمها باعث کاهش عملکرد و یا حتی باعث ناپایداری میشود و بنابراین باید در مدل درنظر گرفته شود. سیستمهای مکانیکی، بیولوژیکی، شبکه های کامپیوتری، شبکه های عصبی و رباتیک جزو این دسته هستند.
در واقع LQG از یک کنترلکننده بهینه LQR و یک فیلتر کالمن تشکیل شده است که فیلتر کالمن از خروجیهای سیستم تخمین حالتها را در هر لحظه محاسبه کرده و در اختیار کنترلکننده LQR قرار میدهد.
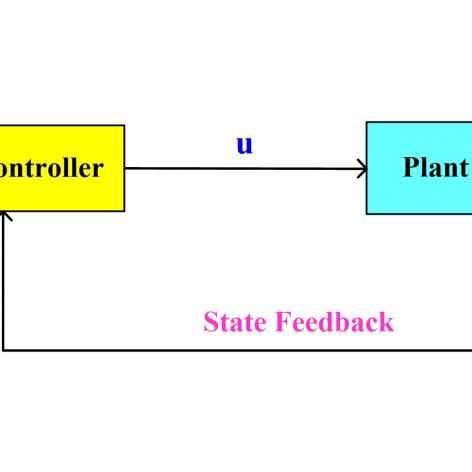
کنترل بهینه (Optimal Control) به عنوان یکی از روشهای مدرن کنترلی، جایگاه ویژهای در بحث سیستمهای کنترل دارد. یکی از روشهای کنترلی بهینه رگولاتور درجه دوم خطی (Linear Quadratic Regulator) است که به اختصار LQR خوانده میشود.
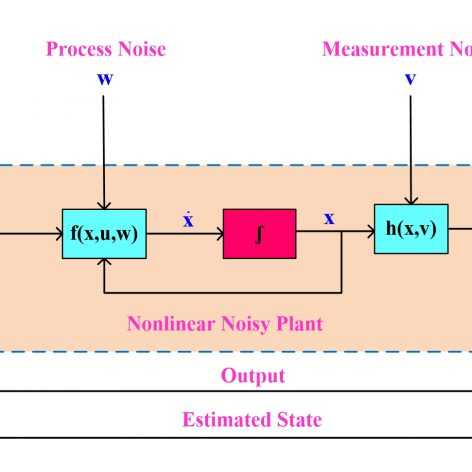
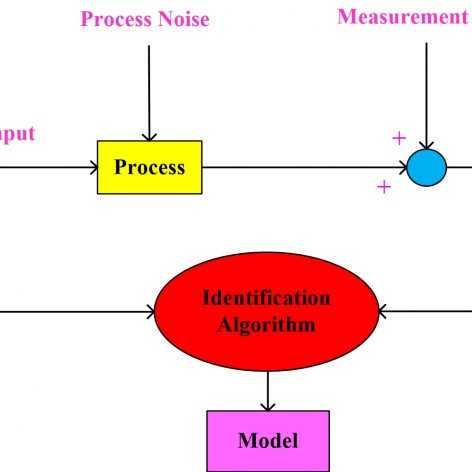
همونطور که میدانید بحث تخمینگر (Estimator) یا رویتگر (Observer) نه تنها در مهندسی کنترل (Control Engineering) و مهندسی برق (Electrical Engineering)، بلکه…
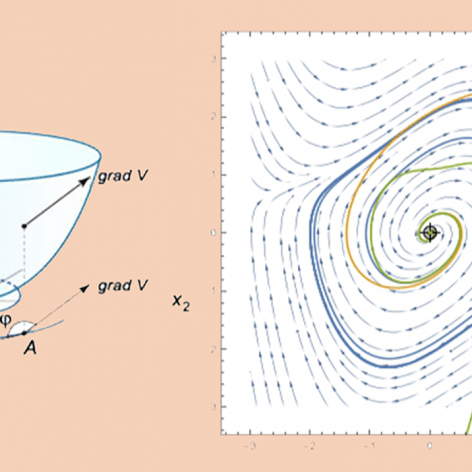
بسیاری از سیستمهای کنترل به صورت غیرخطی مدل میشوند تا با پدیده مدل شده تطابق کافی داشته باشد. به همین جهت سیستمهای…