 مرجع مهندسی كنترل | دانش با کیفیت در مرز علم
مرجع مهندسی كنترل | دانش با کیفیت در مرز علم
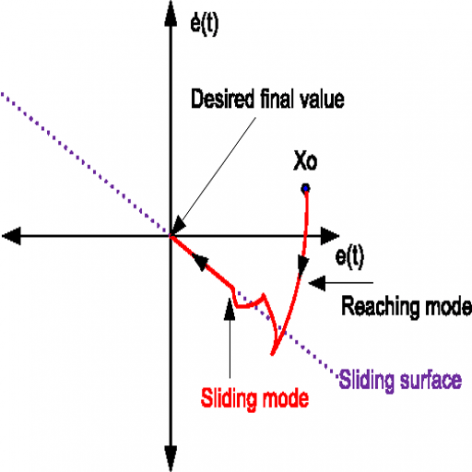
Robust control using incremental sliding mode for under-actuated systems with mismatched uncertainties
این مقاله در ارتباط با یک روش جدید مد لغزشی می باشد. مد لغزشی ارائه شده یک مد لغزشی چند لایه می باشد که برای یک دسته خاص از سیستم ها که به فرم استریک(strike) نیستند پیشنهاد شده است. این مقاله مربوط به سال 2008 می باشد که در یک کنفرانس معتبر آمریکایی ارائه شده است. هر چند این کنفرانس حتی از بسیاری از کنفرانس های ieee نیز معتبر تر است اما به جرات می توان گفت در صورتی که روش جدید بر روی یک سیستم واقعی پیاده سازی می شد قطعا در سطح یک مقاله ISI می بود.
کاری که من انجام دادم این است که این مقاله را بر روی یک سیستم آزمایشگاهی شبیه سازی نمودم. سیستم آزمایشگاهی مورد نظر توپ و میله است.
راهنمای خرید:
- لینک دانلود فایل بلافاصله بعد از پرداخت وجه به نمایش در خواهد آمد.
- همچنین لینک دانلود به ایمیل شما ارسال خواهد شد به همین دلیل ایمیل خود را به دقت وارد نمایید.
- ممکن است ایمیل ارسالی به پوشه اسپم یا Bulk ایمیل شما ارسال شده باشد.
- در صورتی که به هر دلیلی موفق به دانلود فایل مورد نظر نشدید با ما تماس بگیرید.




حامد یادگاری
چطور میتونم براتون بفرستم؟
یعنی به چه آدرس و ایمیلی؟
controlerادمین سایت ( مالک تایید شده )
ببخشید دیر پاسخ دادم. از طریق ایمیلم.
s.h.moosapour@gmail.com
حامد یادگاری
سلام
من قبلا جزوه کنترل مد لغزشی سایت را هم از خدمت تان تهیه کرده بودم. خیلی کارا بود و من را با این کنترلر آشنا کرد.
مقالات زیادی استادم روی این کنترلر ارائه داده است و الآن هم دارم با او روی همین نوع کنترل کننده برای یک ماهواره کار میکنم. اگر مایل باشید مقالات مربوطه را ارسال کنم تا در سایت قرار دهید و دیگران هم استفاده کنند.
موفق باشید
controlerادمین سایت ( مالک تایید شده )
سلام
از نظری که دادین ممنونم. در مورد جزوه هم نظر لطفتونه. بله حتما بفرستید
سلامت باشید
فرهاد
سلام اگه مشکلی نیست میشه منم ار مطالبتون استفاده کنم؟؟
مدیر سایتادمین سایت ( مالک تایید شده )
سلام
متوجه منظورتون نشدم.
همه میتونن استفاده کنن
فرهاد
مطالبی که آقای یادگاری گفتن دارن رو میشه به منم بدین؟؟