 مرجع مهندسی كنترل | دانش با کیفیت در مرز علم
مرجع مهندسی كنترل | دانش با کیفیت در مرز علم
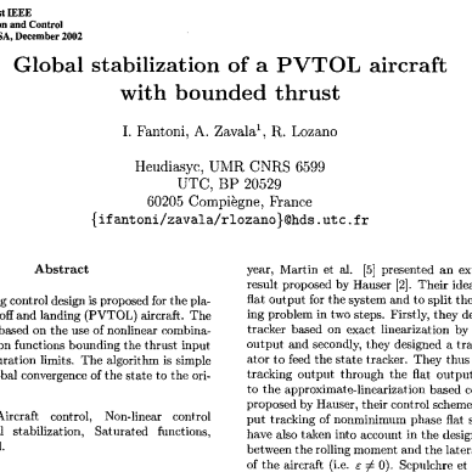
شبیه سازی مقاله ژورنال (Journal of vibration and control (SAGE publications سال 2012
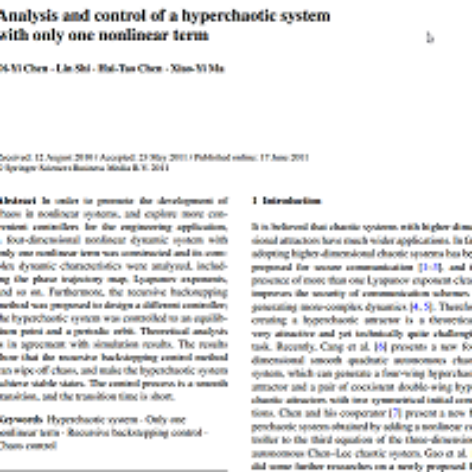
Control for a class of four-dimensional chaotic systems with random-varying parameters and noise disturbance
- مقاله مورد نظر به کنترل یک مدل از سیستم های اشوبناک در حضور اغتشاش و همچنین دارا بودن پارامترهای متغیر با زمان می پردازد. کنترلر به کار گرفته شده در این مقاله کنترل کننده مد لغزشی با سطح سوییچینگ تطبیقی می باشد.این مقاله به طور کامل شبیه سازی شده است و تمامی اشکال موجود در مقاله بدون کوچکترین اختلافی استخراج شده اند. قبل از اجرای برنامه های متلب، ضروری است که فایل توضیحات به طور کامل مطالعه شود.
- فایل های همراه: فایل PDF مقاله، فایل Word توضیحات راهنمای استفاده از کدهای متلب، m-file های متلب
- کلمات کلیدی: سیستم های اشوبناک ، کنترل کننده مد لغزشی، کنترل غیر خطی، مقالات شبیه سازی شده، مهندسی برق
راهنمای خرید:
- لینک دانلود فایل بلافاصله بعد از پرداخت وجه به نمایش در خواهد آمد.
- همچنین لینک دانلود به ایمیل شما ارسال خواهد شد به همین دلیل ایمیل خود را به دقت وارد نمایید.
- ممکن است ایمیل ارسالی به پوشه اسپم یا Bulk ایمیل شما ارسال شده باشد.
- در صورتی که به هر دلیلی موفق به دانلود فایل مورد نظر نشدید با ما تماس بگیرید.




عماد
سلام
این مقاله ترجمه هم داره ؟
هیچ مشکلی قطعا نداره؟
خودتون اشرافی رو ام کد ها دارید مشکلی داشته باشم کمکم کنید؟؟؟
Control for a class of four-dimensional chaotic systems with random-varying parameters and noise disturbance
مقاله مورد نظر به کنترل یک مدل از سیستم های اشوبناک در حضور اغتشاش و همچنین دارا بودن پارامترهای متغیر با زمان می پردازد. کنترلر به کار گرفته شده در این مقاله کنترل کننده مد لغزشی با سطح سوییچینگ تطبیقی می باشد.این مقاله به طور کامل شبیه سازی شده است.
مهندس بابایی
با سلام
خیر این مقاله شامل ترجمه نمی باشد. هر دو مقاله اشوبناک که در سایت قرار داده شده است توسط خود شخص من شبیه سازی شده و m-file ها نیز توسط شخص من نوشته شده اند.بنابراین کاملا مسلط بر کدها هستم.
دقت کنید که این مقاله با استفاده از function نویسی با روش ode45 نوشته شده است. اگر این روش برای شما مشکل است، مقاله دیگری نیز در سایت وجود دارد که من ان را با m-file نویسی ساده انجام دادم که شامل ترجمه نیز می باشد.
همچنین دقت کنید که با توجه به هزینه پایین در نظر گرفته شده برای این مقالات شبیه سازی شده، ما اموزشی در این زمینه نخواهیم داشت اما قطعا موارد کوچکی که برای شما ابهام امیز باشد پاسخ داده خواهد داشت. با اطمینان خاطر عرض می کنم که شبیه سازی ها با زبانی بسیار ساده انجام شده اند و به ندرت دوستان در فهم ان مشکل داشته باشند.
موفق باشید.
عماد
لطفا بفرستید برام خرید انجام شد
مهندس بابایی
با سلام
جهت امور خرید با پشتیبانی انلاین سایت یا مدیریت تماس بگیرید.
عماد
ضمنا یه ایمیل بزنید بهم تا بتونم ازتون کمک بگیرم
سپاس
مهندس بابایی
با سلام
به سوالات شما در همینجا پاسخ داده خواهد شد.
عماد
سلام برادر یه سوال در فیگور دوم حلقه فور نوشتی علتش چیه تو مقاله نبود همچین چیزی؟
مهندس بابایی
با سلام
مدرس این اموزش خانم هستند.
در Figure.2 و Figure.3 فقط دو function بر اساس روش fourth-order Runge-Kutta منطبق با دستورات ode45 تعریف شده است. اصلا حلقه for وجود ندارد. بفرمایید منظورتون از حلقه for چی هست؟
عماد
ببخشید اشتباه گفتم if else در فیگور دوم و سوم برای چیه؟
مهندس بابایی
این حلقه برای تعریف (( φ(u(t) هست که همان کنترل کننده غیرخطی پیوسته سیستم هست که در مقاله با فرمول شماره 22 نشان داده شده است و در برنامه با h نمایش داده شده است. برای اینکه حد اشباع برای کنترل کننده در نظر بگیریم یاید اون رو به زمان محدود بکنیم که یکی از کارهایی که می تونیم انجام بدیم استفاده از دستور شرطی if else است. که این محدودیت زمان با سعی و خطای فراوان گاهی به دست می اید.
و همچنین دوست عزیز دقت کنید که کار شبیه سازی یک مقاله، کار ساده ای نیست چرا که بسیاری از اطلاعات مورد نیاز برای شبیه سازی ، توسط نویسندگان مقاله در مقاله اورده نمی شود. بنابراین تجربه ما در شبیه سازی سیستم های مشابه به ما کمک می کند که چه نکاتی را باید در نظر بگیریم که به جواب هایی با کمترین اختلاف به اشکال مقاله دست یابیم. بنابراین لزوما شما تمام نکات موجود در خط به خط یک برنامه شبیه سازی شده یک مقاله را در ان مقاله نخواهید یافت.
موفق باشید.
عماد
مرسی چرا رابطه شماره 17 که باید در فیگور دوم و سوم استفاده میشد در قسمت دینامیک سیستم مقادیر d1,2,3 را صفر در نظر گرفته اید در صورتی که در مقاله مقادیر مثبت غیر صفر دارد
مهندس بابایی
سوال شما نشون میده اصلا مقاله رو با دقت کافی مطالعه نکردید. ببینید دوست عزیز ما شبیه سازی رو بر اساس یکبار ضریب ثابت a و یکبار ضریب متغیر a انجام میدیم. بنابراین در حالت Fig.2 این ضرایب d1,… را برابر صفر قرار میدیم که a ثابت شود و در حالت Fig.3 مقادیر d1,d2,.. همانطور که در خط 35 برنامه میبینید غیر صفر هستند تا a تابعی متغیر بر حسب sint دربیاید، پس بر چه اساس می فرمایید صفر هست؟
و من در کامنت قبلی هم خدمت شما کامل توضیح دادم که لزوما مقادیری که نویسندگان در مقالاتشون قرار میدن، مقادیر واقعی نیستند که خودشون در شبیه سازی هاشون استفاده کرده باشند. چرا که نویسندگان اغلب تمایل ندارند که شبیه سازی های مقالاتشون به راحتی توسط سایر پژوهشگرها در دسترس قرار گیرد. بنابراین برنامه این مقاله رو که توسط من شبیه سازی شده و در اختیار شما قرار گرفته رو run کنید تا ببینید که چگونه با مقادیری که من به دست اوردم تمام شکل ها بدون کوچکترین اختلافی مشابه انچه در مقاله است استخراج می شود.
و همچنین همانطور که قبلا هم خدمت شما عرض کرده بودم، در قسمت مقالات شبیه سازی شده ما هیچگونه اموزشی نداریم. مگر در حد یک یا دو سوال که برای شما دوستان ابهام ایجاد کرده باشد.
موفق باشید.