کنترل تناسبی-انتگرالی مشتقی یا PID یکی از اولین و رایجترین کنترل کننده های مورد استفاده در صنعت است. با توجه به خواص مهم کنترل کننده PID و مزایای زیاد آن، کتابها و مقالات مختلفی در مورد آن نوشته شده و اصلاحات مختلفی برای آن ارائه شده است. در این مجموعه که اکثر مباحث آن از کتاب استروم گردآوری شده، هدف آموزش طراحی کنترل کننده PID برای سیستم های مختلف به روشی بسیار ساده و کاربردی است. تقریبا برای همه روشهای ذکر شده مثال کاربردی ارائه شده و در محیط سیمولینک متلب شبیه سازی انجام شده است.
جلسه 1: کنترل تناسبی
در ابتدای این جلسه تاریخچه کوتاهی از کنترل تناسبی-انتگرالی-مشتقی یا PID ارائه میشود. سپس کنترل تناسبی برای سیستم مرتبه یک طراحی شده و شرایط پایداری و ردیابی استخراج میشود. در نهایت کنترل تناسبی برای سیستم کروز کنترل (کنترل سرعت اتومبیل) طراحی شده و در محیط متلب شبیهسازی میشود.
مدت زمان آموزش: 61 دقیقه
حجم فایل: 142 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس و فایل متلب
پیش نمایش جلسه اول:
جلسه 2: کنترل انتگرالی و مشتقی
در ابتدای این جلسه کنترل انتگرالی معرفی شده و نحوه طراحی آن برای سیستم مرتبه یک تشریح میشود. سپس یک کنترل کننده PI برای سیستم کروز کنترل طراحی شده و در محیط سیمولینک متلب شبیه سازی میشود. در ادامه کنترل مشتقی معرفی شده و نحوه طراحی آن برای سیستم مرتبه یک تشریح میشود. در نهایت کنترل کننده PD برای سیستم کروز کنترل طراحی شده و در محیط متلب شبیهسازی میشود.
مدت زمان آموزش: 54 دقیقه
حجم فایل: 85 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس و فایلهای متلب
پیش نمایش جلسه دوم:
جلسه 3: معرفی تولباکس PID Tuner متلب
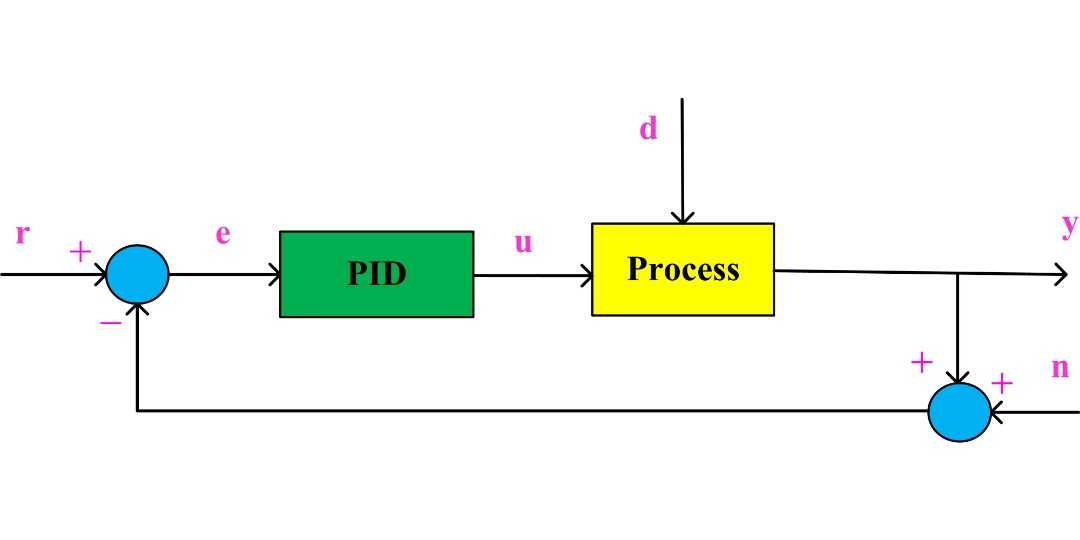
در ابتدای این جلسه دستورات متلب و بلوکهای سیمولینک مربوط به پیادهسازی و تنظیم کنترل کننده PID معرفی میشوند. سپس برای سیستم کروز کنترل در محیط سیمولینک کنترل کننده PID پیوسته طراحی شده و با استفاده از تولباکس PID Tuner متلب بهره های کنترل کننده استخراج میشوند. همچنین کنترل کننده PID دیجیتال نیز برای سیستم کروز کنترل طراحی شده و سیستم حلقه بسته در محیط سیمولینک شبیهسازی میشود. در انتها مقاوم بودن کنترل کننده های طراحی شده جهت حذف اغتشاش و تضعیف نویز اندازهگیری در محیط سیمولینک نشان داده میشود.
مدت زمان آموزش: 82 دقیقه
حجم فایل: 145 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس، کتابهای مربوطه و فایل متلب
پیش نمایش جلسه سوم:
جلسه 4: Setpoint Weighting
در ابتدای این جلسه مفهوم Setpoint Weighting برای حذف اثر تغییرات ناگهانی ورودیهای مرجع و اغتشاش معرفی میشود. سپس بلوک PID دو درجه آزادی برای اینکار در سیمولینک معرفی میشود. در انتها با روش Setpoint Weighting برای کنترل موقعیت یک موتور DC استفاده شده و سیستم حلقه بسته در محیط سیمولینک در متلب شبیهسازی میشود و اثر نویز و اغتشاش بر روی عملکرد سیستم حلقه بسته بررسی میشود.
مدت زمان آموزش: 58 دقیقه
حجم فایل: 128 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس، کتابهای مربوطه و فایل متلب
پیش نمایش جلسه چهارم:
جلسه 5: Anti-windup
در این جلسه مفهوم Anti-windup معرفی میشود. ابتدا مشکل اشباع عملگر با شبیه سازی مثال کنترل زاویه Pitch هواپیما در متلب مطرح میشود. سپس روش Back-Calculation به عنوان یک راه حل مناسب برای کم کردن اثر اشباع عملگر معرفی میشود. در انتها یک کنترل کننده PID با ساختار Back-Calculation جهت کاهش اثر اشباع عملگر برای کنترل زاویه pitch هواپیما طراحی شده و در محیط سیمولینک پیاده سازی میشود.
مدت زمان آموزش: 65 دقیقه
حجم فایل: 168 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس، کتاب استروم و فایلهای متلب
پیش نمایش جلسه پنجم:
جلسه 6: Smith Predictor
در این جلسه پیش بین اسمیت Smith predictor معرفی میشود. ابتدا تاخیر انتقالی معرفی شده و با شبیه سازی مثال کنترل دمای هیتر گازی، اثر منفی آن بر روی عملکرد سیستم نشان داده میشود. سپس ساختار پیش بین اسمیت معرفی شده و با استفاده از آن یک کنترل کننده PID با ساختار اسمیت برای کنترل دمای هیتر طراحی میشود. در انتها سیستم حلقه بسته در محیط سیمولینک شبیه سازی شده و اثرات نامعینی مدل و تاخیر بر روی سیستم حلقه بسته نمایش داده میشود.
مدت زمان آموزش: 59 دقیقه
حجم فایل: 127 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس، کتاب ونگ و استروم و فایلهای متلب
پیش نمایش جلسه ششم:
جلسه 7: (DS (Direct Synthesis
در این جلسه سنتز مستقیم یا Direct Synthesis معرفی میشود. ابتدا کنترل کننده از روش سنتز مستقیم در حالت کلی استخراج میشود. سپس برای سیستمهای مرتبه اول و دوم کنترل کننده با روش مستقیم معرفی میشود. در ادامه روش مستقیم برای سیستمهای دارای تاخیر توسعه داده میشود. در انتها، از روش سنتز مستقیم برای کنترل سرعت موتور DC استفاده شده و سیستم حلقه بسته در سیمولینک متلب شبیه سازی میشود.
مدت زمان آموزش: 54 دقیقه
حجم فایل: 93 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس، کتاب سبورگ و فایلهای متلب
پیش نمایش جلسه هفتم:
جلسه 8: (IMC (Internal Model Control
در این جلسه روش کنترل مدل داخلی یا (IMC (Internal Model Control معرفی میشود. ابتدا ساختار IMC معرفی شده و الگوریتم طراحی کنترل IMC بیان میشود. سپس برای یک سیستم مرتبه اول تاخیردار FOPDT کنترل IMC طراحی میشود. در ادامه، تمرین 12-7 کتاب حل شده و برای یک سیستم مرتبه 4 کنترل IMC طراحی شده و در محیط سیمولینک شبیه سازی میشود. در انتها، با استفاده از روش IMC و روش کاهش مرتبه مدل Skogestad، یک کنترل کننده PID برای کنترل وضعیت یک موتور DC طراحی شده و در محیط سیمولینک شبیه سازی میشود.
مدت زمان آموزش: 80 دقیقه
حجم فایل: 162 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس، کتاب سبورگ و فایلهای متلب
پیش نمایش جلسه هشتم:
جلسه 9: کنترل PID برای سیستمهای MIMO (آرایه بهره نسبی بریستول و pairing)
در ابتدای این جلسه اثر متقابل حلقه های سیستمهای MIMO بررسی میشود. سپس آرایه بهره نسبی بریستول (RGA) به عنوان معیاری از میزان اثر متقابل سیستمهای MIMO معرفی می شود. سپس بحث Pairing مطرح می شود. در انتها صفرهای چند متغیره سیستمهای MIMO معرفی می شوند. تمام مثالهای کتاب استروم که در این جلسه بحث شده اند، در محیط سیمولینک شبیه سازی شده است.
مدت زمان آموزش: 72 دقیقه
حجم فایل: 136 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس، کتاب استروم و فایلهای متلب
پیش نمایش جلسه نهم:
جلسه 10: کنترل PID برای سیستمهای MIMO (دکوپلینگ و سیستمهای موازی)
در ابتدای این جلسه نحوه دکوپله کردن سیستمهای MIMO بیان می شود. سپس معیاری برای تخمین اثر متقابل ارائه می شود. در ادامه سیستمهای موازی معرفی می شوند. در انتها برای سیستم برج تقطیر باینری ردوود کنترل کننده های PID دکوپله شده طراحی شده و در محیط سیمولینک پیاده سازی می شوند.
مدت زمان آموزش: 89 دقیقه
حجم فایل: 164 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس، کتاب استروم و فایلهای متلب
پیش نمایش جلسه دهم:
جلسه 11: طراحی Feedforward
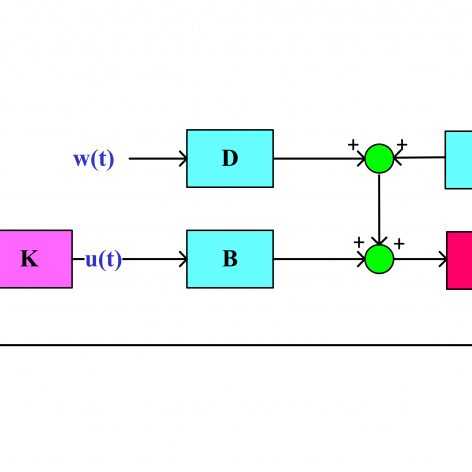
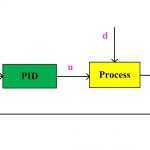
در این جلسه طراحی Feedforward معرفی می شود. ابتدا ساختار سیستم با حلقه فیدبک و Feedforward معرفی شده و نحوه طراحی Feedforward برای رسیدن به سیستم حلقه بسته مطلوب تشریح می شود. سپس طراحی Feedforward خنثی معرفی می شود. در ادامه، نحوه کاهش اثر اغتشاش معلوم توسط طراحی Feedforward بیان می شود. همچنین دو مثال برای بهبود پاسخ سیستم به ورودی مرجع و کاهش اثر اغتشاش حل شده و در محیط سیمولینک متلب شبیه سازی می شوند.
مدت زمان آموزش: 62 دقیقه
حجم فایل: 164 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس، کتاب استروم و فایلهای متلب
پیش نمایش جلسه یازدهم:
جلسه 12: کنترل تکراری (Repetitive Control) و آبشاری (Cascade Control)
در ابتدای این جلسه کنترل تکراری یا Repetitive Control به عنوان یکی از روشهای bottom-up معرفی شده و نحوه حذف اغتشاشات ثابت، سینوسی و متناوب با این روش تشریح می شود. سپس برای یک سیستم مرتبه دوم سه کنترل کننده برای حذف انواع اغتشاشات طراحی شده و در محیط متلب شبیه سازی می شوند. در ادامه، کنترل آبشاری یا Cascade Control معرفی می شود. در انتها، برای دینامیک یک موتور DC کنترل آبشاری طراحی شده و در محیط سیمولینک متلب شبیه سازی می شود.
مدت زمان آموزش: 88 دقیقه
حجم فایل: 160 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس، کتاب استروم و فایلهای متلب
پیش نمایش جلسه دوازدهم:
جلسه 13: الگوهای کنترلی
در ابتدای این جلسه Mid-range Control و Split-range Control معرفی می شوند. سپس محدود کننده های دامنه و سرعت (Amplitude and Rate Limiters) معرفی می شوند. در ادامه روشهای Ratio Control و Blend Station تشریح می شوند. سپس کنترل سلکتور معرفی شده و برای یک موتور DC کنترل کننده سلکتور طراحی شده و و در سیمولینک متلب شبیه سازی می شود.
مدت زمان آموزش: 79 دقیقه
حجم فایل: 149 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس، کتاب استروم و فایلهای متلب
پیش نمایش جلسه سیزدهم:
مطالعه بیشتر
 مرجع مهندسی كنترل | دانش با کیفیت در مرز علم
مرجع مهندسی كنترل | دانش با کیفیت در مرز علم



پژمان زربانویی ( مالک تایید شده )
چرا هر چی کامنت میذاریم پاک میشه ؟!!!!!
مدیر سایتادمین سایت ( مالک تایید شده )
پاک نمیشه ما باید اون کامنت رو تایید و یا پاسخ بدیم تا کامنت شما هم قابل مشاهده باشه. بعضی کامنت ها از طریق ربات ها ارسال میشن
بهنام
با سلام و خسته نباشید بنده کنترل کننده تناسبی-انتگرالی و مشتقی مرتبه کسری را میخواستم، آیا این آموزش موود هست؟
alij63@gmail.com
سلام
خیر. مرتبه کسری در تخصص من نیست
مهران
استاد ببخشید منبع این تدریستون کدوم کتاب هست؟
alij63@gmail.com
سلام
بیشتر کتاب استروم
مجید
سلام ببخشید این آموزش به مرور تکمیل میشه یا کلا همینه؟
علی جوادی
سلام
اکثر مباحث مربوط به کنترل PID داخل همین 13 جلسه موجوده و به احتمال خیلی زیاد جلسه ای اضافه نمیشه.
البته ممکنه در آینده موضوع جالب و مرتبطی پیدا کنم و اضافه کنم ولی احتمالش کمه