 مرجع مهندسی كنترل | دانش با کیفیت در مرز علم
مرجع مهندسی كنترل | دانش با کیفیت در مرز علم
سیستم کلیدزن با کلیدزنی دلخواه (Systems under Arbitrary Switching) یکی از انواع سیستم های کلیدزن یا سوئیچینگ است که با تلفیق حالت های پیوسته و گسسته تبدیل دارای قابلیت مدل سازی، تحلیل و یا کنترل سیستم های پیچیده می باشد. سیستم کلیدزن تحت کلیدزنی دلخواه به این دلیل به این نام نامیده شده است در مورد سیگنال کلیدزنی آن اطلاعات خاصی وجود ندارد و یا اینکه سیگنال کلیدزنی آن به قدری پیچیده و دشوار و یا پرهزینه است که مدل نشده است. در این مجموعه آموزشی به معرفی سیستم کلیدزن تحت کلیدزنی دلخواه پرداخته و تئوری و تحلیل پایداری آن را مورد بررسی قرار خواهیم داد.
پیش نیاز این مجموعه: آشنایی با مفاهیم و اصطلاحات و تعاریف اولیه سیستم های سوئیچینگ است، مجموعه آموزشی مقدماتی بر سیستم های سوئیچینگ در همین پایگاه داده می تواند دانش مورد نیاز برای این مجموعه را فراهم سازد. پیش نیاز بعدی آشنایی با روابط نامساوی ماتریسی طی و نحوه حل آن ها در MATLAB می باشد که در این زمینه هم رجوع به مجموعه آموزشی نامساوی های ماتریسی خطی همین پایگاه داده توصیه می گردد.
این پست تکمیل شده است. در صورت نیاز به ارائه مباحث تکمیلی لطفا درخواست خود را از طریق مدیر سایت مطرح فرمایید.
جلسه اول:
در این جلسه مقدمه ای از سیستم های کلیدزن با کلیدزنی دلخواه بیان شده است.
جلسه دوم:
در جلسه دوم از این مجموعه آموزشی به پایداری سیستم کلیدزن دلخواه پرداخته شده است.
جلسه سوم:
این جلسه به ادامه بحث پایداری سیستم های کلیدزن دلخواه می پردازد.
- لینک دانلود فایل بلافاصله بعد از پرداخت وجه به نمایش در خواهد آمد.
- همچنین لینک دانلود به ایمیل شما ارسال خواهد شد به همین دلیل ایمیل خود را به دقت وارد نمایید.
- ممکن است ایمیل ارسالی به پوشه اسپم یا Bulk ایمیل شما ارسال شده باشد.
- در صورتی که به هر دلیلی موفق به دانلود فایل مورد نظر نشدید با ما تماس بگیرید.



علی
آیا مقاله خاصی دارید که جهت ارتباط کنترل کوادروتور و سیستم های سوییچینگ به من معرفی کنید؟
دکتر فرجی
مقاله خاصی سراغ ندارم اما اگر با کلمات کلیدی کنترل تحت شبکه برای کواد سرچ بکنید مطالب زیادی می آره که بعد در ترکیب با چالش های کنترل تحت شبکه که در اون ها از مدل های سوپیچینگ مارکوف استفاده می شه می تونید موضوع خوبی تعریف کنید
علی
عذر میخوام آیا توی این آموزش ها بحث سیستم های سوئیچینگ مارکف مطرح میشه؟
دکتر فرجی
آموزش مدل های مارکوفی در سایت هست اما در بحث سیستم های سودیچینگ فرصت نکردم به صورت خاص بهشون اشاره کنم مقالات من رو سرچ و دانلود کنید بیس ساده ای از مدل های کلیدزن مارکوف رو می تونید اونجا ببینید بعد برای کار خودتون گسترش بدید
علی
سلام وقتتون بخیر
آیا میشود از سیستم های سوئیچینگ برای کنترل کوادروتور استفاده کرد؟ و آیا میشود بحث جدیدی ایجاد کرد؟
با تشکر
دکتر فرجی
سلام بله می شه. مخصوصا اگر بحث کنترل تحت شبکه برای تعداد زیادی از کواد ها مطرح باشه و هدف بررسی مسایل مربوط به ارتباط تحت شبکه باشه
معمولا تاخیر ها و از دست رفتن داده در ارتباط در اونها به خوبی با مدل های سوپیچینگ و مخصوصا انواع تصادفی مثل مارکوفی قابل بیان هستن
محمدرضا گنجی
سلام من این اموزشو خریدم قسمت اول و سوم مشکلی نداره ولی قسمت دوم صدا نداره میشه منو راهنمایی کنید
دکتر فرجی
سلام، مجدد دانلود و اکسترکت کنید، اگر حل نشد لطفا با مدیر سایت تماس بگیرید
رویا
باعرض سلام واحترام.تشکر بسیار از زحمت جنابعالی در تدریس این مجموعه ارزشمند.جسارتا۲ سوال از خدمتتون داشتم:(سوال۱)برای پایدارسازی سیستم سوئیچ شونده Autonomousاز گروه کلیدزنی وابسته به حالت،ازانجاییکه سیگنال کلیدزنی وابسته به حالت از پیش تعیین شده و در اختیارمانیست،ایا می شود از طریق حل LMI برای هر مد(زیرسیستم)یک بهره فیدبک جداگانه ki بدست اورد(بدون اعمال هیچ کنترل ویا طراحی در سیگنال سوئیچینگ؟؟چون طراحی سیگنال کلید زنی در این حالت که امکان پذیر نیست واز قبل مشخص است.(سوال۲)ایا مبحث Asynchronous Switched Systems،برای سیستمهای سوییچ شونده با کلیدزنی وابسته به حالت،همراه با تاخیر در ورودی،جایگاهی دارد؟؟؟ یا اینکه بحث Asynchronous فقط در کلیدزنی وابسته به زمان معنا پیدا می کند؟بسیار از لطف وتوجه شما سپاسگزارم.ممنون.
دکتر فرجی
@رویا,
سلام خانم صلح پور عزیز.
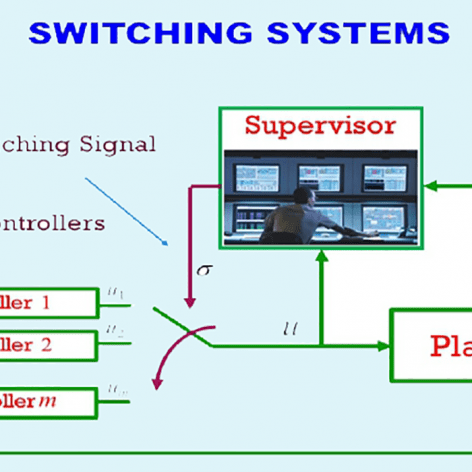
در مورد سوال اول بله می شه این کار رو کرد. کلا پایداری سیستم های سوئیچینگ به دو نحو هست یا از طریق طراحی سیگنال کلیدزنی یا از طریق طراحی بهره ها (و یا هر دو).
البته در کلیدزنی وابسته به حالت می شه با قرار دادن یک سری قیود پایدارسازی رو برای سیستم انجام داد. و اینکه بگیم کلیدزنی وابسته به حالت دست ما نیست لفظا درست نیست. البته باید کلاس دقیق سیستم شما رو هم ببینیم تا بشه نظر قطعی داد.
در مورد سوال دومتون باید بگم بله و در مسیر خوبی هستید، کلیدزنی آسنکرون بحثیه که حدود یکی دو ساله در مباحث سیستم های کلیدزن باز شده. اتفاقا یک پروژه مشترک با دکتر جاهد داریم در همین زمینه که دانشجو به زودی دفاع می کنه توصیه می کنم باهاشون صحبت کنید اگر خواستید من مشاوره ی کارتون رو قبول می کنم در زمینه آسنکرونی.
الهه
سلام خسته نباشید
ببخشید در مورد سیستم های سوئیچ شونده کانونیکال می تونید کمک و راهنمایی بفرمایید؟
ممنون
دکتر فرجی
سلام.
canonical Switched Systems
سیستم های کلیدزنی هستند که دینامیک زیرسیستم ها فرم کانونی داره.
البته چالش اصلی شون هم پیدا کردن تبدیل واحدی هست که بتونه همه زیر سیستم ها رو کانونی بکنه.
برای یادآوری فرم های کانونی برای دینامیک در نمایش فضای حالت هم می تونید به مبحث تحقق ها و تئوری تحقق در کنترل مدرن مراجعه کنید.
الهه
@دکتر فرجی,
خیلی ممنونم. لطف فرمودید.
الهه
سلام خسته نباشید
ببخشید در مورد class of canonical switched system می تونید کمک و راهنمایی بفرمایید؟
ممنون
حسینی
سرکار خانم دکتر فرجی
با سلام و احترام،
برای مطالعه بیشترسیستم های سوئیچینگ چه مراجعی را معرفی می کنید؟
(البته فایل های آموزشی شما را خریداری و استفاده کرده ام که بسیار مفید هستند)
سپاس فراوان.
دکتر فرجی
@حسینی,
سلام دوست عزیز. رفرنس های متعددی در این زمینه هست.
برای معرفی لطفا ابتدا بگید که روی کدام کلاس از سیستم های سوییچینگ می خواهید کار کنید؟
حسینی
@حسینی,
با سلام .
اگر امکان داره در مورد هر دو کلاس Time-dependent و State-dependent بفرمایید.
با تشکر
دکتر فرجی
@حسینی,
این دو رفرنس پایه ای هستند:
1.Stability Theory of Switched Dynamical Systems, Zhendong Sun, Shuzhi Sam Ge
2. Switching in Systems and Control, Daniel Liberzon
حسینی
@دکتر فرجی,
با سلام ،
لطف کردید.
خیلی ممنون.
لیلا
سلام خانم دکتر
وقت بخیر
ببخشید سوالی برام پیش اومده اگر ممکنه راهنمایی بفرمایید: برای تعریف دو LMI ، داخل یک m فایل ، میتوان هم زمان از yalmip و
lmi toolbax استفاده کرد؟ یعنی یکی را با yalmip و دیگری را با LMI toolbax برای متلب تعریف کرد؟
ممنون از لطفتون
دکتر فرجی
سلام چون سالور هر کدوم از این ها فقط دستورات خودش رو می شناسه همچین امکانی وجود نداره. مگر اینکه مجموعه ال ام آی ها از هم مستقل باشن
لیلا
@دکتر فرجی,
سلام مجدد
خیلی ممنون لطف کردید.
لیلا
سلام خانم دکتر ، خسته نباشید ….ازتون سپاسگزارم به خاطر مطالب مفیدی که در اختیارمون گذاشتید.
بعد از ملاحظه ی این ویدئو ها چند سوال برام پیش اومده که در صورت امکان لطفا راهنمایی بفرمایید ، ممنون میشم :
1) ایا این نوع کدنویسی(چه برای ساخت سیگنال سوئیچ و یا پاسخ زمانی) برای سیستم های Impulsive Switched هم قابل استفاده است؟
2)آآیا اگر سیستمی بطور مثال average dwell time باشد آیا در ساخت سیستم سوئیچ باید فلسفه ی کدنویسی تغییر کند؟
3) اگر مساله ما پایدارسازی باشد و بعد از حل lmi برای هر مد یا هر زیرسیستم یک بهره ی فیدبک جداگانه ی Ki بدست آید برای اعمال به سیستم چه باید کرد؟ یعنی برای هر زیرسیستم، K متناظرش باید اعمال شود؟
از اینکه سوالاتم طولانی شد عذرخواهی می کنم ، متاسفانه شدیدا به مشکل خوردم.
در صورت حل نشدن مشکلم ،خانم دکتر امکان تماس تلفنی با شما هست؟
دکتر فرجی
سلام زنده باشید.
برای سیستم های impulsive نوع سیگنال کلیدزنی اصلا مهم نیست و به عبارتی این دینامیک سیستم و خواص تغییر زمانی دینامیک هست که باعث می شه سیستم جهش کنه. پس در پاسخ سوال اولتون باید بگم که بله قابل استفاده است.
در مورد سوال بعد کلیدزنی Average Dwell Time کلیدزنی مقید محسوب می شه اما خب در فلسفه ی کد زدنش فرقی نیست، بالاخره اونجا هم مود ها طبق قاعده ای تغییر می کنند. چیزی که متفاوته فرم سیگنال کلیدزنیه که بر خلاف کد های سیگنال دلخواه در این مبحث، اونجا باید با قاعده ی خاصی نوشته بشه
لیلا
@دکتر فرجی,
ممنون از وقتی که گذاشتید خانم دکتر
فقط شما بالا فرمودید: “چیزی که متفاوته فرم سیگنال کلیدزنیه که بر خلاف کد های سیگنال دلخواه در این مبحث، اونجا باید با قاعده ی خاصی نوشته بشه” منظورتون اینه که مثلا اکر در سیستمی بنا باشه Average Dwell Time=4 باشه…یعنی در کدنویسی اونجا که تعیین میکنیم چند ثانیه توی هر مود باشه حواسمون به این 4 ثانیه باشه که متوسط حضور سیستم در هر مود بیشتر از 4 ثانیه نشه…درسته؟
یک سوال دیگه هم اینکه اگر سیستم ما تاخیردار باشد آن هم از نوع تاخیر متغیر با زمان ، چطور باید این سیستم را گسسته سازی کرد؟…نحوه ی برخورد با این تاخیر متغیر با زمان برای گرفتن پاسخ زمانی سیستم برای من مشکل ساز شده…
ممنون میشم در صورت امکان راهنمایی بفرمایید.
دکتر فرجی
سلام.
در مورد سوال اولتون، بله دقیقا همینطور هست.
برای سیستم های تاخیری و گسسته سازی هم کافیه میزان تاخیر رو تبدیل به تاخیر در گام های گسسته سازی بکنید مثلا اگر دو ثانیه تاخیر دارید، و با گام 0.1 گسسته می کنید می شه 0.2 واحد تاخیر. متغیر با زمان هم به همین ترتیبه.
لیلا
@دکتر فرجی,
واقعا ازتون ممنونم لطف می کنید و وقت می ذارید برای پاسخ به سوالات.
من هر شش جلسه ی سیستم سوئیچینگ شما رو تهیه کردم بسیار آموزنده و بسیارراه گشا بود.
آرزوی سلامتی و توفیق روزافزون دارم برای شما و همه ی گروه تلاشگر مرجع مهندسی کنترل.
دکتر فرجی
خواهش می کنم موفق باشید