امروزه با توجه به قابلیتهای بالای نرم افزار Matlab و Simulink، متخصصان حوزه های مختلف طراحی های خود را در محیط سیمیولینک انجام میدهند. در بسیاری از کاربردهای تحقیقاتی، علمی و صنعتی، نیاز به برقراری ارتباط سخت افزاری وجود دارد. در صورتی که این ارتباط بتواند مستقیما از محیط سیمولینک متلب با دستگاههای صنعتی انجام گیرد، قابلیت بزرگی در پیاده سازی ایده های علمی متخصصان ایجاد میشود.
در مورد رشته کنترل این قابلیت بیشتر نمود پیدا میکند. مثلا فرض کنید شما بتوانید مستقیما با استفاده از سیمولینک داده های لازم برای شناسایی یک Plant را در محیط سیمولینک جمع آوری کرده و عملیات شناسایی خود را انجام دهید. و یا کنترل کننده طراحی شده خود را مستقیما به پلنت خود متصل نمایید.
مثال جذاب دیگر برای کاربرد xPC target میتواند بحث (HIL (Hardware In the Loop (سخت افزار در حلقه) باشد. برای روشن شدن بحث فرض بفرمایید یک پلنتی را بتوانید مدل کنید، به خوبی میدانید که مدل سازی دقیق عملا امکان پذیر نیست. دینامیک های مدل نشده، مباحث فیزیکی حاکم در دینامیکهای کنترلی و … باعث میشود که مدل واقعی با مدل به دست آمده متفاوت باشد. در مورد سخت افزار در حلقه پلنت شما در حقیقت مستقیما در حلقه کنترلی طراحی شده توسط شما قرار میگیرد و شما میتوانید مستقیما فرمانهای خود را به عملگرهای سیستم اعمال کرده و از سنسورهای پلنت فیدبک بگیرید اما موضوع بسیار مهم این است که باید فرمان ها و تصمیمات کنترلی در پله های زمانی دقیق صادر شوند و به عبارت دیگر کنترل کننده شما باید Real time (زمان واقعی) باشد.
XPC Target سیمولینگ در حقیقت پاسخ تمامی موارد ذکر شده فوق است و به بیانی دیگر ارتباط سخت افزاری سیمولینک متلب به صورت Real time با استفاده از تولباکس XPC تارگت به آسانی برقرار میشود و تا حدود بسیار زیادی متخصصان رشته کنترل و سایر رشته ها از جمله مکانیک، هوا فضا، شیمی و … را از مسائل و مشکلات طراحی های الکترونیکی بی نیاز مینماید.
در این سری از آموزش ها که به صورت کاملا کاربردی و عملی خدمت دوستان ارائه خواهد شد، متخصصان محترم را قدم به قدم با XPC Target آشنا خواهیم کرد.
به امید آنکه مطالب برای شما قابل استفاده بوده باشد..
بسیار خوشحال میشویم که با نظرات بسیار ارزشمند خود ما را در این راه یاری بفرمایید..
“فایل Image مربوط به DVD بوت XPC Target از پایین همین صفحه با حجم تقریبی [212MB] قابل دانلود میباشد”
جلسه اول:
معرفی XPC Target و سرفصل کامل مطالب
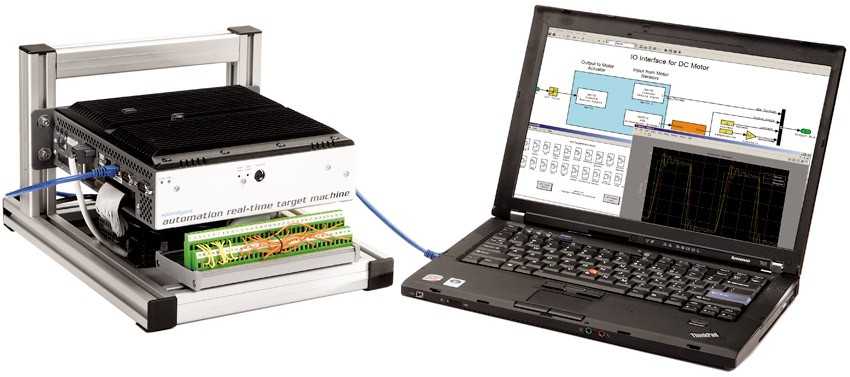
در این جلسه معرفی XPC Target انجام میگیرد و چند مثال کاربردی از XPC Target ارائه میشود. مثالها شامل کاربردهایی است که یک کامپیوتر و یا یک برد Arduino به عنوان تارگت برای Matlab در نظر گرفته شده است. یک کلیپ کنترلی بسیار جذاب که در آن از از برد Arduino به عنوان کنترل کننده استفاده شده برای درک بهتر کاربرد XPC Target آمده است. در پایان جلسه اول، نقشه راه کلی که در برگیرنده سرفصل کامل مطالب است ارائه شده است.
مدت زمان آموزش: 44:43 دقیقه
محتویات آموزش: فیلم آموزشی
حجم فایل: 123 مگابایت
پیش نمایش جلسه اول:
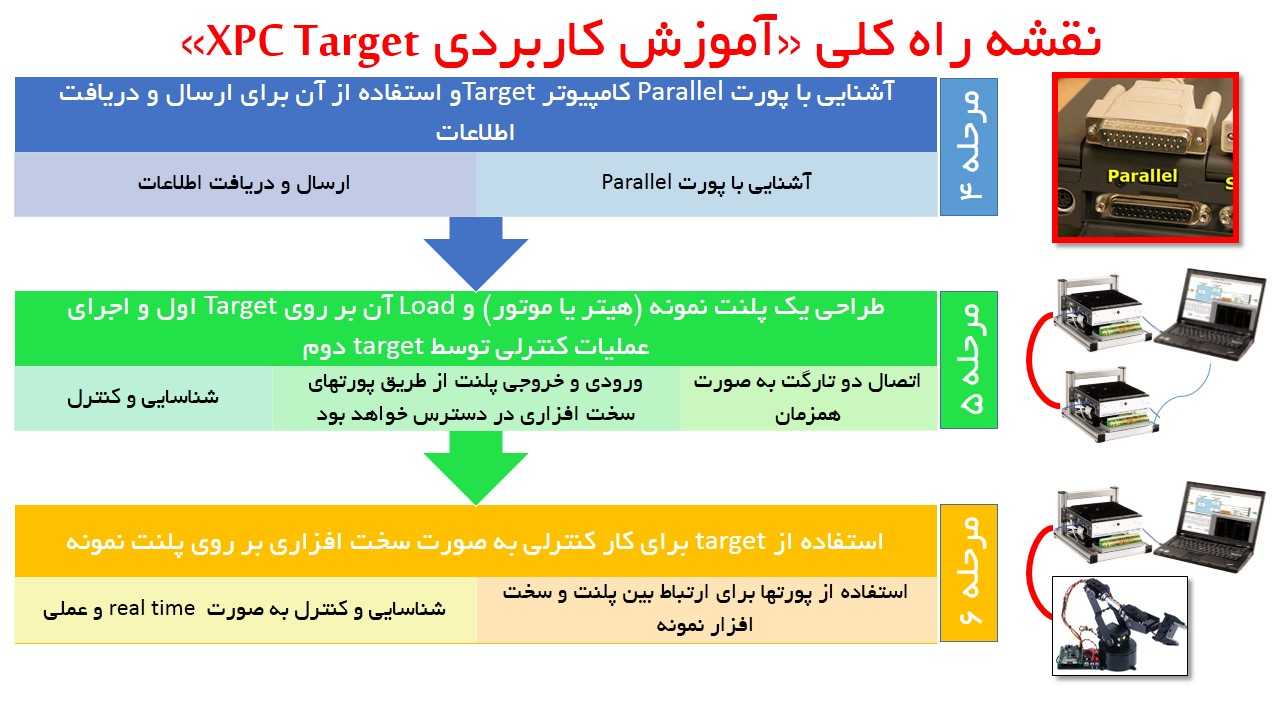
نقشه راه کلی: برای بهره مندی هر چه بهتر سرفصل کامل مطالب در این قسمت قرار داده میشود


جلسه دوم:
مرحله اول(قسمت اول) – اتصال یک کامپیوتر به عنوان Target
با توجه به نقشه راه کلی ارائه شده در جلسه اول، در این جلسه مرحله اول را شروع میکنیم. پیش نیازهای نرم افزاری لازم برای نصب و راه اندازی کامپایلر XPC Target متلب ارائه شده است. در مرحله یک از سرفصل ارائه شده اتصال کامیوتر HOST و Target را از طریق کابل شبکه (Lan) انجام خواهیم داد. با توجه به اینکه همه کارتهای شبکه توسط XPC Target پشتیبانی نمیشوند، بررسی مفصل کارتهای شبکه انجام شده در این جلسه انجام شده است. برای درک بهتر موضوع، راهنمایی قدم به قدم برای خرید کارت شبکه از سایت دی جی کالا در این جلسه از آموزش آمده است. انجام تنظیمات کلیدی اولیه برای ساخت یک DVD راه انداز (Boot)، برای اتصال کامپیوتر تارگت در محیط نرم افزار Matlab تشکیل دهنده مطالب پایانی این جلسه هستند.
مدت زمان آموزش: 49:09 دقیقه
محتویات آموزش: فیلم آموزشی – فایلهای لازم برای نصب کامپایلر XPC(شامل فایل PDF آموزش، Windows SDK 7.1_64bit، ءMicrosoft Visual C++ 2012 Professional_64bit) – فایل PDF حاوی لیست چیپست کارتهای شبکه پشتیبانی شده
پیش نیازهای آموزش:
پیش نیازهای نرم افزاری: آشنایی اولیه با محیط Matlab در حد اجرای دستورات
پیش نیازهای سخت افزاری:
۱- یک Laptop و یا کامپیوتر که نرم افزار Matlab به همراه Simulink و تولباکس XPC Target نصب شده باشد و دارای کارت شبکه و DVD Writer باشد.(Host)
۲ – یک کامپیوتر دیگر به عنوان Target که دارای DVD ROM و کارت شبکه با مشخصاتی که در آموزش به طور مفصل توضیح داده خواهد شد باشد.(Target)
۳ – یک کابل Lan برای اتصال Host و target
۴ – یک DVD خام
حجم فایل: 100 مگابایت
پیش نمایش جلسه دوم:
جلسه سوم:
مرحله اول(قسمت دوم) – اتصال یک کامپیوتر به عنوان Target
با توجه به نقشه راه کلی ارائه شده در جلسه اول و شروع مرحله اول در جلسه گذشته، در این جلسه مرحله اول را به پایان میرسانیم. چنانکه در جلسه اول تنظیمات کلیدی برای ساخت DVD راه انداز کامپیوتر Target را انجام دادیم در این جلسه DVD راه انداز را تولید کرده و توسط آن پس از انجام تنظیماتی در Setup کامپیوتر target به صورت کاملا کاربردی کامپیوتر تارگت را در محیط XPC Target راه اندازی میکنیم. همچنین برای اینکه کامپیوتر Host را وصل کنیم نیاز به تنظیم شبکه وجود دارد که آن را هم در این جلسه انجام میدهیم. پس از انجام اتصال دو کامپوتر هاست و تارگت، تستهای مختلفی را برای ارزیابی قدرت پردازنده کامپیوتر Target در این جلسه انجام میدهیم. اهمیت تستها هنگامی که بخواهید سرعت پردازش خود را در اجرای عملی یک فایل طراحی شده در سیمولینک بالا ببرید مشخص میشود. از طریق تستهای انجام شده در این جلسه، میتوان کمترین sample time مربوط به target برای اجرای فایل مشخص با تعداد بلوکهای 3 – 62 – 310 – 620 و 1550 را استخراج کرد.
مدت زمان آموزش: 48:29 دقیقه
محتویات آموزش: فیلم آموزشی
پیش نیازهای آموزش:
پیش نیازهای نرم افزاری: آشنایی اولیه با محیط Matlab در حد اجرای دستورات
پیش نیازهای سخت افزاری:
۱- یک Laptop و یا کامپیوتر که نرم افزار Matlab به همراه Simulink و تولباکس XPC Target نصب شده باشد و دارای کارت شبکه و DVD Writer باشد.(Host)
۲ – یک کامپیوتر دیگر به عنوان Target که دارای DVD ROM و کارت شبکه با مشخصاتی که در آموزش به طور مفصل توضیح داده خواهد شد باشد.(Target)
۳ – یک کابل Lan برای اتصال Host و target
۴ – یک DVD خام
حجم فایل: 174 مگابایت
پیش نمایش جلسه سوم:
جلسه چهارم:
مرحله دوم(قسمت اول) – اجرای فایل طراحی شده سیمولینک به صورت Real time بر روی Target
با توجه به نقشه راه کلی ارائه شده در جلسه اول، در این جلسه مرحله دوم را شروع میکنیم. این آموزش شامل موارد ذیل است:
1- شروع طراحی یک فایل ساده در محیط سیمولینک
2- اضافه کردن اسکوپ XPC target
3- تنظیمات مربوط به ساخت و Load کردن فایل بر روی تارگت
مدت زمان آموزش: 48:32 قیقه
محتویات آموزش: فیلم آموزشی، فایل سیمولینک
پیش نیازهای آموزش:
پیش نیازهای نرم افزاری: آشنایی اولیه با محیط Matlab در حد اجرای دستورات، آشنایی با سیمولینک
پیش نیازهای سخت افزاری:
همانند جلسه قبل…
حجم فایل: 84 مگابایت
پیش نمایش جلسه چهارم:
جلسه پنجم:
مرحله دوم(قسمت دوم) – اجرای فایل طراحی شده سیمولینک به صورت Real time بر روی Target
ادامه مرحله دوم شامل موارد ذیل است:
1- Load کردن عملی فایل بر روی کامپیوتر تارگت و اجرای آن، آشنایی با XPC Explorer که میتوان با استفاده از آن در حین اجرای فایل، اسکوپ به هر سیگنال دلخواهی اضافه کرد و اتفاقات سخت افزار را مشاهده نمود
2- آشنایی با قابلیتهای اسکوپ XPC و دیدن سیگنال هم در اسکوپ تارگت و هم Host. با این قابلیت حتی اگر سیستم ما دارای مانیتور نباشد، میتوان با استفاده از اسکوپ Host سیگنال را مشاهده کرد.
3- در این فایل آموزشی پس از شروع اجرای فایل بر روی کامپیوتر تارگت، کامپیوتر هاست(کامپیوتر طراح) را در حین اجرا قطع میکنیم تا ببینیم که اجرای فایل بر روی تارگت ادامه پیدا می کند.
مدت زمان آموزش: 46:19 دقیقه
محتویات آموزش: فیلم آموزشی، فایل سیمولینک
پیش نیازهای آموزش:
پیش نیازهای نرم افزاری: آشنایی اولیه با محیط Matlab در حد اجرای دستورات، آشنایی با سیمولینک
پیش نیازهای سخت افزاری:
همانند جلسه قبل…
حجم فایل: 196 مگابایت
پیش نمایش جلسه پنجم:
جلسه ششم:
مرحله دوم(قسمت سوم) – اجرای فایل طراحی شده سیمولینک به صورت Real time بر روی Target
پایان مرحله دوم شامل موارد ذیل است:
1- نمایش مقادیر بر روی کامپیوتر target به صورت متنی با این توضیح که در صورتی که ما بخواهیم مقادیر عددی را بر روی کامپیوتر تارگت نمایش دهیم از این قابلیت استفاده میکنیم. در این آموزش همچنین یک مدار کوچک برای ماکزیمم گیری از سیگنال طراحی میشود که بتوانیم قابلیت مذکور را تست کنیم.
2- تغییر تمامی پارامترهای بلوکهای سیمولینک پس از Build فایل و در حین اجرا. یعنی پارامترهای بلوکهای مختلف اعم از دامنه و فرکانس و … را میتوان تغییر داد.
3- ذخیره یک سیگنال خاص بر روی کامپیوتر تارگت به صورت فایل و فراخوانی آن توسط کامپیوتر هاست و Plot کردن آن.
4- گروه بندی پارامترها و سیگنالها.
5- تحلیل پردازشی بر اساس فایل طراحی شده. از این قابلیت برای زمانی میخواهیم استفاده کنیم که حجم فایل طراحی شده و تعداد بلوکهای آن زیاد است و از طرفی ما نیز نیازمند سرعت در اجرا هستیم، میخواهیم بدانیم حداکثر سرعتی که میتوان درمورد فایل طراحی شده توسط کامپیوتر تارگت، میتوان به آن دست یافت چقدر است.
مدت زمان آموزش: 45:08 دقیقه
محتویات آموزش: فیلم آموزشی، فایل سیمولینک، M-File موجود در آموزش
پیش نیازهای آموزش:
پیش نیازهای نرم افزاری: آشنایی اولیه با محیط Matlab در حد اجرای دستورات، آشنایی با سیمولینک
پیش نیازهای سخت افزاری:
همانند جلسه قبل…
حجم فایل: 215 مگابایت
پیش نمایش جلسه ششم:
جلسه هفتم:
مرحله سوم(قسمت اول) – آشنایی با پورت سریال target و استفاده از آن برای ارسال و دریافت اطلاعات
آغاز مرحله سوم که شامل موارد ذیل است:
1 – آشنایی با استانداردهای مختلف سریال شامل RS232، RS422، RS423 و RS4852
2 – آشنایی با انواع کابلهای ارتباط سریال
3 – آشنایی با انواع کانکتورهای سریال شامل DB9، DB25 و RJ45،
4 – آشنایی با Handshaking سخت افزاری و نرم افزاری در ارتباط پیشرفته سریال
5 – مقایسه سرعت و طول مجاز استانداردهای مختلف سریال
مدت زمان آموزش: 54:12 دقیقه
محتویات آموزش: فیلم آموزشی
حجم فایل: 109.61 مگابایت
پیش نمایش جلسه هفتم:
جلسه هشتم:
مرحله سوم(قسمت دوم) – آشنایی با پورت سریال target و استفاده از آن برای ارسال و دریافت اطلاعات
ادامه مرحله سوم که شامل موارد ذیل است:
1 – ساخت کابل سریال برای ارتباط RS232
2 – معرفی مبدل USB به سریال برای لپ تاپ هایی که فاقد پورت سریال هستند
3 – معرفی برنامه CodeVision برای تست پورت سریال
4 – معرفی برنامه Serial Port Monitor برای تست پورت سریال
5 – معرفی برنامه Hyper Terminal (ویندوز XP) برای تست پورت سریال
مدت زمان آموزش: 49:00 دقیقه
محتویات آموزش: فیلم آموزشی، برنامه CodeVision، برنامه Serial Port Monitor
حجم فایل: 99.7 مگابایت
پیش نمایش جلسه هشتم:
جلسه نهم:
مرحله سوم(قسمت سوم) – آشنایی با پورت سریال target و استفاده از آن برای ارسال و دریافت اطلاعات
پایان مرحله سوم که شامل موارد ذیل است:
1 – تست ارسال و دریافت داده RS232 از طریق دو نرم افزار Hyper terminal و Codevision بین دو کامپیوتر در محیط ویندوز
2 – تست ارسال و دریافت داده RS232 از طریق دو نرم افزار Hyper terminal و Serial Port Monitor بین دو کامپیوتر در محیط ویندوز
3 – دریافت داده سریال RS232 به صورت کامل از طریق Target در محیط XPC Target
4 – ارسال داده سریال RS232 به صورت کامل از Target به HOST در محیط XPC Target
5 – ارسال و دریافت داده سریال RS232 به صورت کامل بین Target و HOST به صورت همزمان در محیط XPC Target
مدت زمان آموزش: 58:34 دقیقه
محتویات آموزش: فیلم آموزشی، فایل سیمولینک ارسال، فایل سیمولینک دریافت، فایل سیمولینک ارسال و دریافت همزمان، برنامه Hyper Terminal برای ویندوزهای 7
حجم فایل: 107 مگابایت
پیش نمایش جلسه نهم:
جلسه دهم:
مرحله چهارم(قسمت اول) – آشنایی با پورت Parallel کامپیوتر target و استفاده از آن برای ارسال و دریافت اطلاعات
آغاز مرحله چهارم که شامل موارد ذیل است:
1 – آشنایی مختصری با پورت پارالل کامپیوتر از جمله پینهای کانکتور DB25 و سطوح ولتاژی
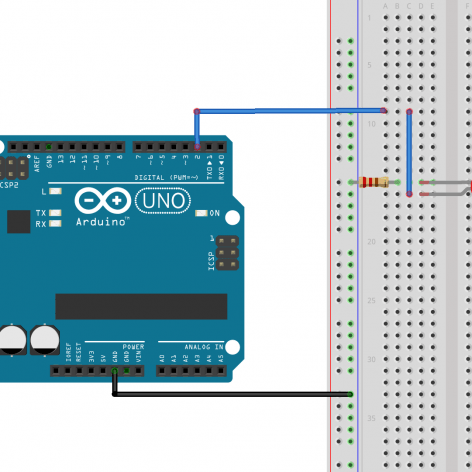
2 – نکات کاربردی ساخت کانکتور Parallel که یک طرف آن به تارگت و طرف دیگر به هشت عدد LED متصل میگردد
3 – محاسبات مقاومت مربوط به LED هر بیت با توجه به سطح ولتاژ پورت
4 – تست نرم افزاری و سخت افزاری کانکتور ساخته شده به صورت عملی به منظور اطمینان از کانکتور ساخته شده
مدت زمان آموزش: 45:41 دقیقه
محتویات آموزش: فیلم آموزشی، برنامه تست پورت LPT، تصویر پینهای مربوط به پورت DB25
حجم فایل: 64.8 مگابایت
پیش نمایش جلسه دهم:
[/showhide]
جلسه یازدهم:
مرحله چهارم(قسمت دوم) – آشنایی با پورت Parallel کامپیوتر target و استفاده از آن برای ارسال و دریافت اطلاعات
ادامه مرحله چهارم که شامل موارد ذیل است:
1 – آشنایی با بلوک “خروجی دیجیتال پورت پارالل” با دسترسی بایتی
2 – ارسال فرمان خروجی به 8 عدد LED با استفاده از بلوک Constant از host به target
3 – ارسال فرمان خروجی به صورت HEX
4 – ارسال فرمان به صورت چشمک زن با تغییر زمان تناوب
مدت زمان آموزش: 51:59 دقیقه
محتویات آموزش: فیلم آموزشی، فایل سیمولینک
حجم فایل: 116 مگابایت
پیش نمایش جلسه یازدهم:
[/showhide]
جلسه دوازدهم:
مرحله چهارم(قسمت سوم) – آشنایی با پورت Parallel کامپیوتر target و استفاده از آن برای ارسال و دریافت اطلاعات
پایان مرحله چهارم که شامل موارد ذیل است:
1 – آشنایی با بلوک “خروجی دیجیتال پورت پارالل” با دسترسی بیتی
2 – آشنایی با بلوک “ورودی دیجیتال پورت پارالل” با دسترسی بایتی
3 – آشنایی با بلوک “ورودی دیجیتال پورت پارالل” با دسترسی بیتی
مدت زمان آموزش: 37:04 دقیقه
محتویات آموزش: فیلم آموزشی، فایلهای سیمولینک
حجم فایل: 124 مگابایت
پیش نمایش جلسه دوازدهم:
[/showhide]
جلسه سیزدهم:
مرحله پنجم(قسمت اول) – طراحی یک پلنت نمونه و load آن بر روی target اول و اجرای عملیات کنترلی توسط target دوم
آغاز مرحله پنجم که شامل موارد ذیل است:
1 – آشنایی با معادلات دینامیکی کنترل سرعت و موقعیت موتور DC
2 – شروع سه روش برای مدلسازی و مدلسازی بر مبنای تابع تبدیل
3 – آشنایی با Mask که به نکات مربوط به ذخیره پارامترهای عددی بر روی فایل سیمولینک میپردازد
مدت زمان آموزش: 50:56 دقیقه
محتویات آموزش: فیلم آموزشی، فایلهای سیمولینک
حجم فایل: 78.2 مگابایت
پیش نمایش جلسه سیزدهم:
[/showhide]
جلسه چهاردهم:
مرحله پنجم(قسمت دوم) – طراحی یک پلنت نمونه و load آن بر روی target اول و اجرای عملیات کنترلی توسط target دوم
ادامه مرحله پنجم که شامل موارد ذیل است:
1 – آشنایی با مدلسازی کنترل سرعت و موقعیت موتور DC در فضای حالت
2 – مدلسازی بر مبنای معادلات دینامیکی حاکم که در سیستمهای غیر خطی هم کاربرد دارد
3 – مقایسه سه روش مدلسازی با هم
مدت زمان آموزش: 48:46 دقیقه
محتویات آموزش: فیلم آموزشی، فایلهای سیمولینک
حجم فایل: 74.9 مگابایت
پیش نمایش جلسه چهاردهم:
[/showhide]
جلسه پانزدهم:
مرحله پنجم(قسمت سوم) – طراحی یک پلنت نمونه و load آن بر روی target اول و اجرای عملیات کنترلی توسط target دوم
ادامه مرحله پنجم که شامل موارد ذیل است:
1 – طراحی فایل سیمولینگ تارگت plant به صورت قدم به قدم
2 – انتخاب پورت سریال به عنوان درگاه ارتباطی پلنت
3 – رفع اشکالات مرسوم فایل سیمولینک تارگت پلنت مرسوم به صورت مرحله به مرحله
مدت زمان آموزش: 45:40 دقیقه
محتویات آموزش: فیلم آموزشی، فایل سیمولینک
حجم فایل: 65.1 مگابایت
پیش نمایش جلسه پانزدهم:
[/showhide]
جلسه شانزدهم:
مرحله پنجم(قسمت چهارم) – طراحی یک پلنت نمونه و load آن بر روی target اول و اجرای عملیات کنترلی توسط target دوم
ادامه مرحله پنجم که شامل موارد ذیل است:
1 – طراحی فایل سیمولینگ تارگت plant به صورت قدم به قدم
2 – رفع اشکالات مرسوم فایل سیمولینک تارگت پلنت مرسوم به صورت مرحله به مرحله
مدت زمان آموزش: 44:25 دقیقه
محتویات آموزش: فیلم آموزشی، فایل سیمولینک
حجم فایل: 108 مگابایت
پیش نمایش جلسه شانزدهم:
جلسه هفدهم:
مرحله پنجم(قسمت پنجم) – طراحی یک پلنت نمونه و load آن بر روی target اول و اجرای عملیات کنترلی توسط target دوم
ادامه مرحله پنجم که شامل موارد ذیل است:
1 – طراحی فایل سیمولینگ تارگت plant به صورت قدم به قدم
2 – گسسته سازی دینامیکها از جمله: موقعیت، سرعت و جریان
مدت زمان آموزش: 46:11 دقیقه
محتویات آموزش: فیلم آموزشی، فایل سیمولینک
حجم فایل: 84 مگابایت
پیش نمایش جلسه هفدهم:
جلسه هجدهم:
مرحله پنجم(قسمت ششم) – طراحی یک پلنت نمونه و load آن بر روی target اول و اجرای عملیات کنترلی توسط target دوم
ادامه مرحله پنجم که شامل موارد ذیل است:
1 – load کردن دینامیکهای گسسته بر روی تارگت پلنت
2 – مانیتور کردن پارامترها و تنظیم محدوده A/D
3 – دیدن پارامترها از طریق HOST
مدت زمان آموزش: 45:56 دقیقه
محتویات آموزش: فیلم آموزشی، فایل سیمولینک
حجم فایل: 78 مگابایت
پیش نمایش جلسه هجدهم:
جلسه نوزدهم:
مرحله پنجم(قسمت هفتم) – طراحی یک پلنت نمونه و load آن بر روی target اول و اجرای عملیات کنترلی توسط target دوم
ادامه مرحله پنجم که شامل موارد ذیل است:
1 – بحث روی زمان نمونه برداری گسسته سازی
2 – سرعت انتقال اطلاعات سریال به منظور بستن حلقه کنترلی
مدت زمان آموزش: 46:57 دقیقه
محتویات آموزش: فیلم آموزشی، فایل سیمولینک، m-file
حجم فایل: 66 مگابایت
پیش نمایش جلسه نوزدهم:
جلسه بیستم:
مرحله پنجم(قسمت هشتم) – طراحی یک پلنت نمونه و load آن بر روی target اول و اجرای عملیات کنترلی توسط target دوم
ادامه مرحله پنجم که شامل موارد ذیل است:
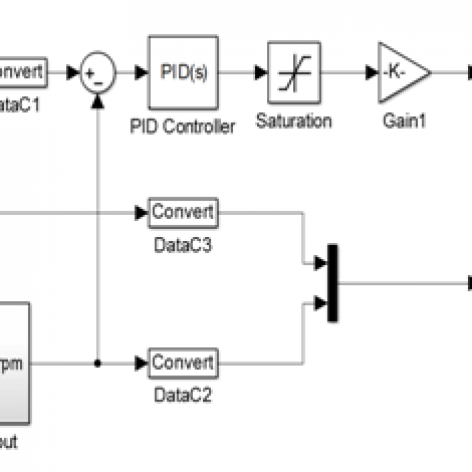
1 – تعریف هدف کنترلی و رابطه کنترل کننده
2 – شروع ساخت مدل کنترل کننده در فایل سیمولینک
مدت زمان آموزش: 46:33 دقیقه
محتویات آموزش: فیلم آموزشی، فایل سیمولینک
حجم فایل: 75 مگابایت
پیش نمایش جلسه بیستم:
جلسه بیست و یکم:
مرحله پنجم(قسمت نهم) – طراحی یک پلنت نمونه و load آن بر روی target اول و اجرای عملیات کنترلی توسط target دوم
ادامه مرحله پنجم که شامل موارد ذیل است:
1 – ادامه ساخت مدل کنترل کننده
2 – ساخت DVD دوم برای تارگت کنترل کننده
مدت زمان آموزش: 47:41 دقیقه
محتویات آموزش: فیلم آموزشی، فایل سیمولینک
حجم فایل: 75 مگابایت
پیش نمایش جلسه بیست و یکم:
جلسه بیست و دوم:
مرحله پنجم(قسمت دهم) – طراحی یک پلنت نمونه و load آن بر روی target اول و اجرای عملیات کنترلی توسط target دوم
ادامه مرحله پنجم که شامل موارد ذیل است:
1 – ادامه ساخت مدل کنترل کننده در فایل سیمولینک
2 – تعریف دو تارگت در xpc explorer
3 – آشنایی با بلوک های FIFO
مدت زمان آموزش: 45:01 دقیقه
محتویات آموزش: فیلم آموزشی، فایل سیمولینک
حجم فایل: 75 مگابایت
پیش نمایش جلسه بیست و دوم:
جلسه بیست و سوم:
مرحله پنجم(قسمت یازدهم) – طراحی یک پلنت نمونه و load آن بر روی target اول و اجرای عملیات کنترلی توسط target دوم
ادامه مرحله پنجم که شامل موارد ذیل است:
1 – رفع اشکال مدل کنترل کننده در سیمولینک
2 – اتصال همزمان دو تارگت به صورت عملیاتی
3 – مانیتور کردن متغیرها در xpc explorer
مدت زمان آموزش: 45:13 دقیقه
محتویات آموزش: فیلم آموزشی، فایل سیمولینک
حجم فایل: 73 مگابایت
پیش نمایش جلسه بیست و سوم:
جلسه بیست و چهارم:
مرحله پنجم(قسمت دوازدهم) – طراحی یک پلنت نمونه و load آن بر روی target اول و اجرای عملیات کنترلی توسط target دوم
ادامه مرحله پنجم که شامل موارد ذیل است:
1 – شبیه سازی پلنت و کنترل کننده و تحلیل حلقه بسته کنترلی
2 – پیدا کردن عیب طراحی
3 – اصلاح مدل پلنت و تست عملی مجدد
مدت زمان آموزش: 49:33 دقیقه
محتویات آموزش: فیلم آموزشی، فایل سیمولینک
حجم فایل: 100 مگابایت
پیش نمایش جلسه بیست و چهارم:
جلسه بیست و پنجم:
مرحله پنجم(قسمت سیزدهم) – طراحی یک پلنت نمونه و load آن بر روی target اول و اجرای عملیات کنترلی توسط target دوم
ادامه مرحله پنجم که شامل موارد ذیل است:
1 – اصلاح مدل کنترل کننده و تست عملی مجدد
2 – شروع بازطراحی کنترل کننده به دلیل محدودیت موجود در سیستم
مدت زمان آموزش: 42:18 دقیقه
محتویات آموزش: فیلم آموزشی، فایل سیمولینک
حجم فایل: 100 مگابایت
پیش نمایش جلسه بیست و پنجم:
جلسه بیست و ششم:
مرحله پنجم(قسمت چهاردهم) – طراحی یک پلنت نمونه و load آن بر روی target اول و اجرای عملیات کنترلی توسط target دوم
ادامه مرحله پنجم که شامل موارد ذیل است:
1 – باز طراحی کامل کنترل کننده با توجه به sample time
2 – باز سازی مدل پلنت، load بر روی تارگتها به صورت همزمان
مدت زمان آموزش: 43:27 دقیقه
محتویات آموزش: فیلم آموزشی، فایل سیمولینک
حجم فایل: 75 مگابایت
پیش نمایش جلسه بیست و ششم:
جلسه بیست و هفتم:
مرحله پنجم(قسمت پانزدهم) – طراحی یک پلنت نمونه و load آن بر روی target اول و اجرای عملیات کنترلی توسط target دوم
پایان مرحله پنجم که شامل موارد ذیل است:
1 – تست دو تارگت به صورت همزمان به طور کامل
2 – مشاهده عملیاتی پاسخ پله و سینوسی و دیدن خطای خروجی، جمع بندی و خداحافظی
مدت زمان آموزش: 37:50 دقیقه
محتویات آموزش: فیلم آموزشی، فایل سیمولینک، فایل MAT
حجم فایل: 107 مگابایت
پیش نمایش جلسه بیست و هفتم:
مطالعه بیشتر
 مرجع مهندسی كنترل | دانش با کیفیت در مرز علم
مرجع مهندسی كنترل | دانش با کیفیت در مرز علم



shokuhi
درود بر شما
من اکنون با وبگاهتان آشنا شدم. هم چنین لطف کردید و شماره موبایل دوست گرامیم آقای دکتر حقیقی را در اختیارم گذاشت.
خواهشمندم که هزینه مجموعه آموزشی xpc target ایشان را با تخفیف ویژه بفرمایید.
سپاس
شکوهی
مدیر سایتادمین سایت ( مالک تایید شده )
سلام. در حال حاضر تخفیفی نداریم. ممنون
zarei
من از یک شرکت دولتی تماس می گیرم. جهت خرید مجموعه آموزشی XPC Target
از انجا که استفاده کنندگان دوره افراد مختلف هستند می خواستم ببینم مجموعه دارای محدودیت کاربر و محدودیت سیستم هست. یا خیر
با تشکر
مدیر سایتادمین سایت ( مالک تایید شده )
سلام لطفا در مجموعه ها جستجو کنید اگر نبود اساتید ما برای خدمت گزاری در زمینه های صنعتی نیز اماده هستن. سپاس
محمد
با سلام و درود بر شما
من برای کار پژوهشی-تحقیقاتی در دانشگاه می خواهم یک مجموعه برای خواندن adc و فرمان دادن dac از طریق xpc-target ایجاد کنم. با توجه به عدم حمایت مالی از طرف دانشگاه، می خواهم خودم با کمترین هزینه شخصی این کار را انجام دهم. اگر لطف کنید و من را راهنمایی کنید ممنون می شوم.
می خواهم بدانم که ارزان ترین کارت نمونه بردار که سیمولینک مطلب آنرا ساپورت می کند و می توان با آن از طریق xpc ارتباط برقرار کرد و آنرا به مادربورد یک کامپیوتر قدیمی بعنوان target متصل کرد، چیست؟
این کارت دارای قابلیت نمونه برداری حدود 8 سیگنال آنالوگ adc با فرکانس بالاتر از 10KHZ و فرمان دادن یک سیگنال انالوگ dac و همچنین قابلیت فرمان دادن دو خروجی pwm باشد.
همچنین اگر قیمت تقریبی برای چنین کارتی که فرکانس نمونه برداری آن بالای 10KHZ باشد، را هم مشخص کنید ممنون می شوم.
پیشاپیش از راهنمایی شما متشکرم
دکتر حامد حقیقی
با سلام و احترام
شماره تماس خدمتتان از طریق ایمیل ارسال شد..