 مرجع مهندسی كنترل | دانش با کیفیت در مرز علم
مرجع مهندسی كنترل | دانش با کیفیت در مرز علم
کنترل بهینه دارای تعارف جدید و روش های ریاضی پیچیده ای برای حل مسائل است. مرجع مهندسی کنترل سری آموزش بهینه را برای شما آماده کرده است.

تاخیر زمانی در بسیاری از سیستمها باعث کاهش عملکرد و یا حتی باعث ناپایداری میشود و بنابراین باید در مدل درنظر گرفته شود. سیستمهای مکانیکی، بیولوژیکی، شبکه های کامپیوتری، شبکه های عصبی و رباتیک جزو این دسته هستند.
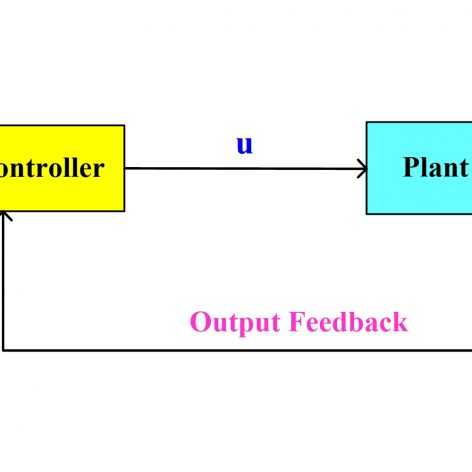
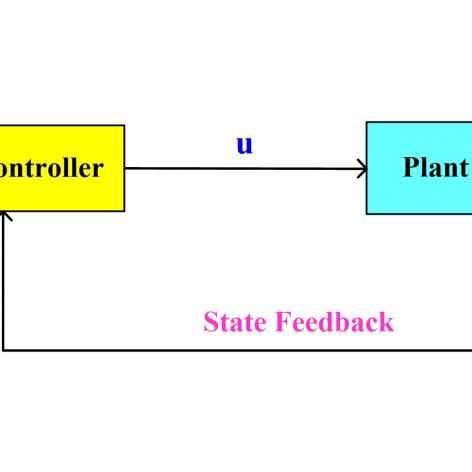
در واقع LQG از یک کنترلکننده بهینه LQR و یک فیلتر کالمن تشکیل شده است که فیلتر کالمن از خروجیهای سیستم تخمین حالتها را در هر لحظه محاسبه کرده و در اختیار کنترلکننده LQR قرار میدهد.
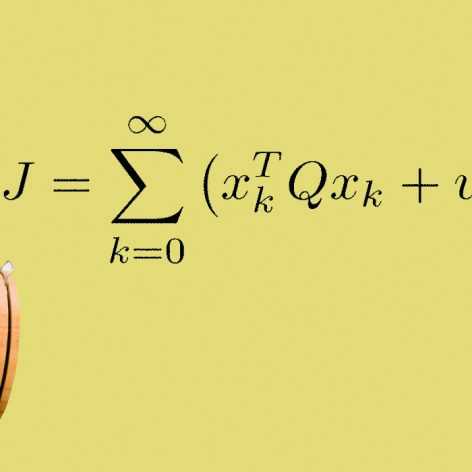
کنترل بهینه (Optimal Control) به عنوان یکی از روشهای مدرن کنترلی، جایگاه ویژهای در بحث سیستمهای کنترل دارد. یکی از روشهای کنترلی بهینه رگولاتور درجه دوم خطی (Linear Quadratic Regulator) است که به اختصار LQR خوانده میشود.