 مرجع مهندسی كنترل | دانش با کیفیت در مرز علم
مرجع مهندسی كنترل | دانش با کیفیت در مرز علم

تاخیر زمانی در بسیاری از سیستمها باعث کاهش عملکرد و یا حتی باعث ناپایداری میشود و بنابراین باید در مدل درنظر گرفته شود. سیستمهای مکانیکی، بیولوژیکی، شبکه های کامپیوتری، شبکه های عصبی و رباتیک جزو این دسته هستند.
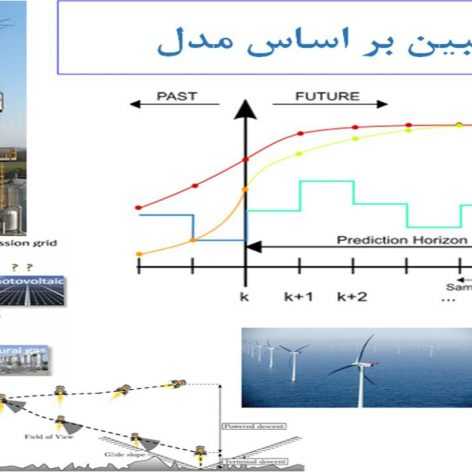
در این پست آموزش کنترل پیشبین بر اساس مدل قرار داده شده است. کنترل پیش بین بر اساس مدل (Model Predictive Control…

یک کنترل کننده مقاوم دینامیک برای سیستمهای خطی تحت نامعینی پارامتری به گونهای طراحی میشود که فقط از خروجی (یا خروجی های) سیستم برای کنترل استفاده میکند و نیازی به تمام حالتها ندارد.

در این سری جلسات برای این سیستمها که کلی تر هم هستند، LMI های مورد نیاز برای بدست آوردن بهره کنترل کننده فیدبک حالت جهت حذف اثر نامعینی پارامتری و همچنین تضعیف اغتشاش محاسبه خواهند شد.
