 مرجع مهندسی كنترل | دانش با کیفیت در مرز علم
مرجع مهندسی كنترل | دانش با کیفیت در مرز علم
نویسنده:
دکتر علی جوادی
بازدید:
3269 بازدید
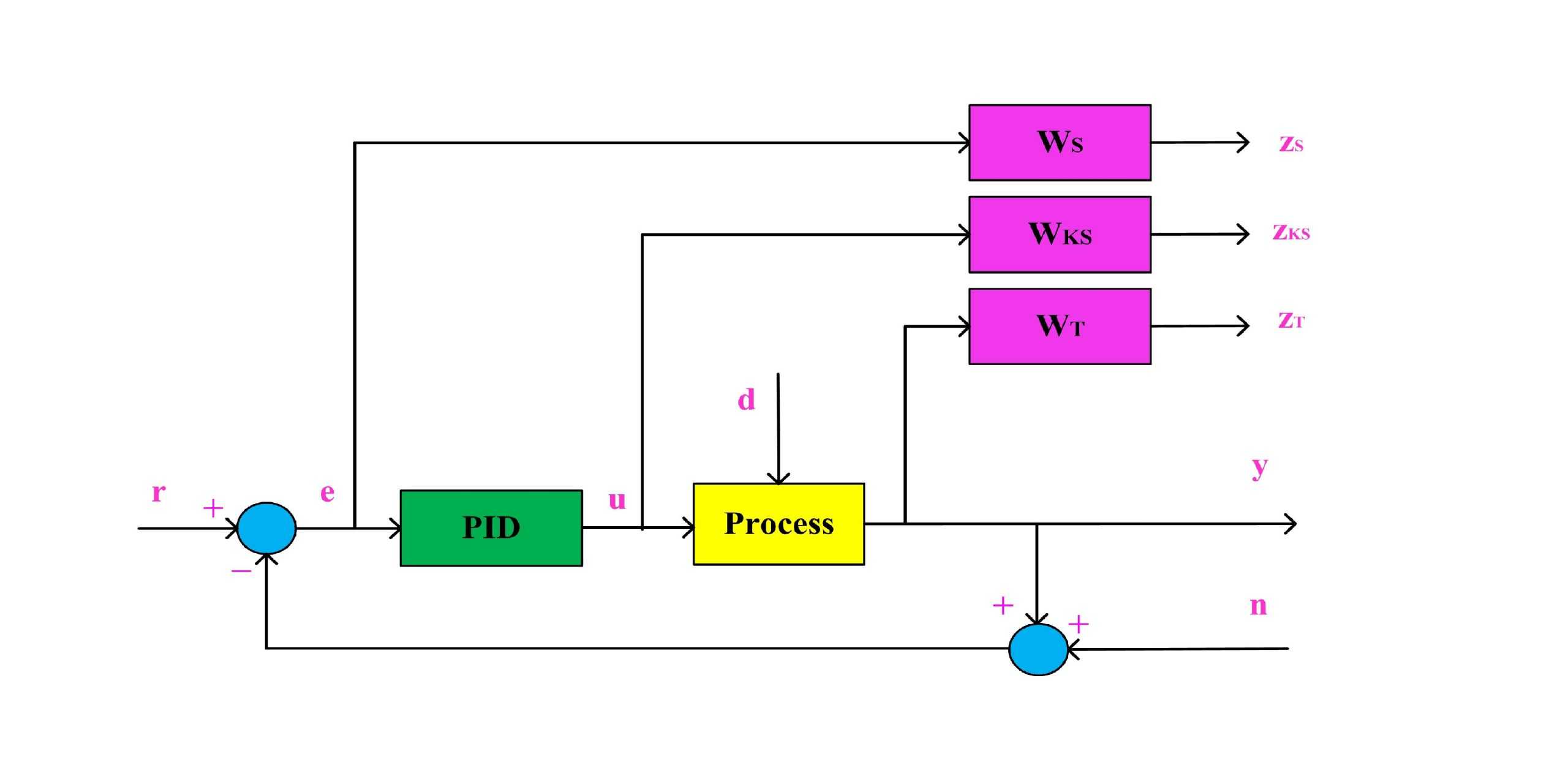
در شش مجموعه قبلی مربوط به کنترل مقاوم، نحوه فرمولبندی مساله کنترل مقاوم ∞H سیستمهای خطی تحت اغتشاش (فیدبک حالت و فیدبک خروجی)، نامعینی پارامتری (فیدبک حالت و فیدبک خروجی) و اغتشاش و نامعینی پارامتری (فیدبک حالت و فیدبک خروجی) مورد بررسی قرار گرفت. در مجموعه های قبلی وزنهای تابع جریمه همگی ثابت انتخاب شده بودند (وزندهی استاتیک). در این مجموعه مساله کنترل مقاوم ∞H سیستمهای خطی تحت اغتشاش (فیدبک حالت) با استفاده از وزندهی دینامیک بررسی می شود تا اهداف کنترلی در بازه فرکانسی مطلوب بدست آید. لطفا قبل از ورود به مباحث مجموعه حاضر، این مجموعه را ببینید.
جلسه 1: مبانی ریاضی و تعریف مساله
جلسه 2: فرمولبندی مساله وزن دهی دینامیک
جلسه 3: فرمولبندی مساله وزن دهی دینامیک
۲۹۸,۰۰۰ تومانAdd to cart


