 مرجع مهندسی كنترل | دانش با کیفیت در مرز علم
مرجع مهندسی كنترل | دانش با کیفیت در مرز علم

Robust PID controller design via LMI approach طراحی کنترل کننده PID مقاوم با رویکرد LMI در مورد مقاله: در این مقاله ،…

در این پست فیلم های آموزشی هدایت موشک با استفاده از قوانین PN و APN و مدلغزشی قرار داده شده است. هدایت به معنای رساندن یک وسیله از نقطه ای به نقطه دیگر می باشد.هدایت موشک یکی از موضوعات تحقیقاتی جذاب در ایران است.
در این پست اکثر شبیه سازی مثال های کنترل تطبیقی استروم (Astrom) رو قرار دادم. شما می تونید هر مثالی که مد…
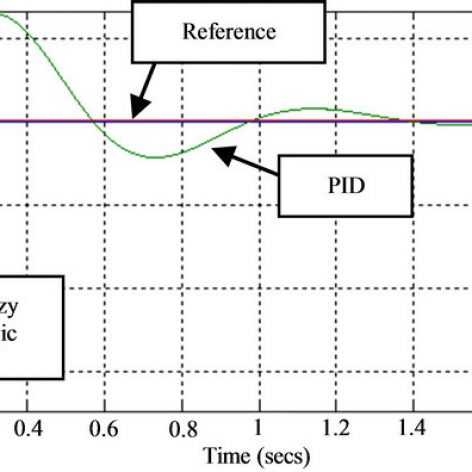
روش فازی یکی از روش هاییه که با روش های تحلیلی زیادی تلفیق میشه. یکی از روش هایی که پایه تمام روش…

در این پست فیلم آموزشی طراحی مد لغزشی و شبیه سازی روی یک سیستم رو گذاشتم. این فیلم تقریبا براساس جزوه ای هستش که توی سایتم هست. اما برتری این فیلم نسبت به جزوه اینه که راحت تر میشه روی نمودارها و روابط بحث کرد.
تمرینات کتاب کنترل غیرخطی اسلاتین به مرور زمان در همین پست قرار داده می شوند. تمرینات فصل دوم رو که به طور…
فصل اول: 5-6-8-11-14-20 فصل دوم: 1-2-3-4-5-6-7-8-9-10-11-14-15-16 فصل سوم: 1-2-3-6-7-8-12-15-16-17 فصل چهارم: 1-2-3-4-5-6-7-10 فصل پنجم: 1-2-3-4-6-7-8-9-11-12 فصل هفتم: 9 درصورتیکه تمرینات دیگری مد…
روش کنترلی backstepping در کشور ما با عناوین گام به عقب، بازگشت به عقب و پسگام نام گذاری شده است. این روش کنترلی یک روش کلاسیک و تحلیلی می باشد. روش گام به عقب یکی از روش های کنترلی مقاوم می باشد.
حل معادلات حالت برای مهندسین کنترل و در یک سطح بالاتر رشته برق و بسیاری از رشته های دیگر که ام فایل می نویسند یک امر کاملا ضروری می باشد. دستورهایی در نرم افزار متلب وجود دارد که معادلات حالت را با شرایط اولیه خاص حل می کند.
