 مرجع مهندسی كنترل | دانش با کیفیت در مرز علم
مرجع مهندسی كنترل | دانش با کیفیت در مرز علم

نرم افزار HFSS یک نرم افزار از شرکت ANSYS است .تا سال های پیش این نرم افزار به صورت مستقل ارائه می شد.اما سال 2017 به بعد این نرم افزار به صورت پک کامل که مجموعه ای از چندین نرم افزار است ارائه شد.
در این پست انواع مد لغزشی مرتبه بالاتر (HOSMC) قرار داده می شود. انواع مد لغزشی مرتبه بالاتر که قرار است به صورت فیلم آموزشی در این پست قرار داده شود به صورت زیر می باشند:مد لغزشی مرتبه دو،مد لغزشی دینامیک،مد لغزشی ترمینال
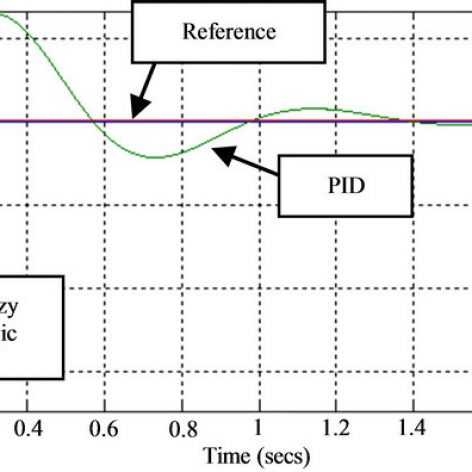
یکی از روشهایی که میشه باهاش مد لغزشی رو تا حدی بهبود داد و نواقص اون رو برطرف کرد مد لغزشی فازی (fuzzy sliding mode) هست. در این پست سعی کردیم روش فازی رو با مد لغزشی تلفیق کنیم.

در این پست فیلم آموزش مد لغزشی طبق کتاب اسلوتین قرار داده میشود. کتاب اسلوتین رو اگه خونده باشید متوجه خواهید شد که بسیاری از مطالب این فصل گنگ هستند و نیاز به توضیحات بیشتر دارند.
بطور کلی روش حساب تغییرات به مساله غیر خطی با شرایط حدی در دو نقطه مجزا منتهی می شود که برای بدست آوردن قانون کنترل بهینه و یا حتی یک کنترل بهینه حلقه باز نمی تواند بصورت تحلیلی حل شود.

Adaptive control of uncertain nonlinear systems using mixed backstepping and Lyapunov redesign techniques کنترل تطبیقی سیستم های غیرخطی نامعین با استفاده از…
در این پست ایده حل تلفیق کنترل کننده های پسگام و مد لغزشی قرار داده شده است. تلفیق بعضی از کنترل کننده ها با هم کار ساده ای به شمار میره. بعنوان مثال تلفیق ژنتیک با کنترل کننده مد لغزشی، فازی و گام به عقب و …..
Robust PID controller design via LMI approach طراحی کنترل کننده PID مقاوم با رویکرد LMI در مورد مقاله: در این مقاله ،…

در این پست فیلم های آموزشی هدایت موشک با استفاده از قوانین PN و APN و مدلغزشی قرار داده شده است. هدایت به معنای رساندن یک وسیله از نقطه ای به نقطه دیگر می باشد.هدایت موشک یکی از موضوعات تحقیقاتی جذاب در ایران است.
روش فازی یکی از روش هاییه که با روش های تحلیلی زیادی تلفیق میشه. یکی از روش هایی که پایه تمام روش…
در این پست فیلم آموزشی طراحی مد لغزشی و شبیه سازی روی یک سیستم رو گذاشتم. این فیلم تقریبا براساس جزوه ای هستش که توی سایتم هست. اما برتری این فیلم نسبت به جزوه اینه که راحت تر میشه روی نمودارها و روابط بحث کرد.
Robust control using incremental sliding mode for under-actuated systems with mismatched uncertainties این مقاله در ارتباط با یک روش جدید مد لغزشی…
تمرینات کتاب کنترل غیرخطی اسلاتین به مرور زمان در همین پست قرار داده می شوند. تمرینات فصل دوم رو که به طور…
فصل اول: 5-6-8-11-14-20 فصل دوم: 1-2-3-4-5-6-7-8-9-10-11-14-15-16 فصل سوم: 1-2-3-6-7-8-12-15-16-17 فصل چهارم: 1-2-3-4-5-6-7-10 فصل پنجم: 1-2-3-4-6-7-8-9-11-12 فصل هفتم: 9 درصورتیکه تمرینات دیگری مد…
روش کنترلی backstepping در کشور ما با عناوین گام به عقب، بازگشت به عقب و پسگام نام گذاری شده است. این روش کنترلی یک روش کلاسیک و تحلیلی می باشد. روش گام به عقب یکی از روش های کنترلی مقاوم می باشد.
- 1
- 2
