 مرجع مهندسی كنترل | دانش با کیفیت در مرز علم
مرجع مهندسی كنترل | دانش با کیفیت در مرز علم

واسط های گرافيکي که در این قسمت ارائه شده است، مربوط به درس فیلتر کالمن از کتاب DanSimon است که دوست خوبم…
در واقع LQG از یک کنترلکننده بهینه LQR و یک فیلتر کالمن تشکیل شده است که فیلتر کالمن از خروجیهای سیستم تخمین حالتها را در هر لحظه محاسبه کرده و در اختیار کنترلکننده LQR قرار میدهد.
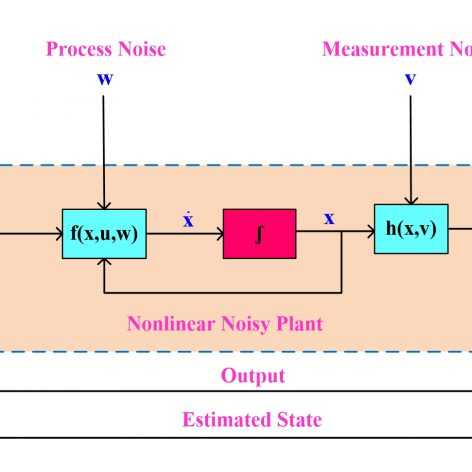
همونطور که میدانید بحث تخمینگر (Estimator) یا رویتگر (Observer) نه تنها در مهندسی کنترل (Control Engineering) و مهندسی برق (Electrical Engineering)، بلکه…

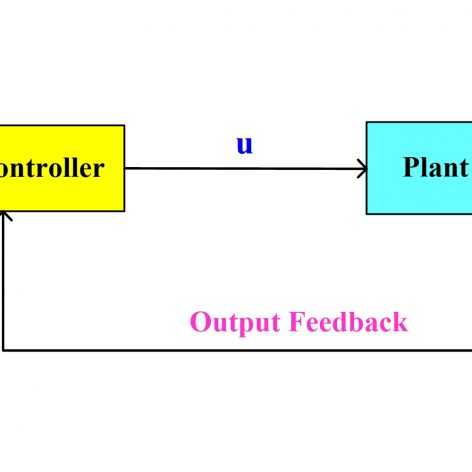
همونطور که میدانید در سیستمهایی که با کنترل کننده فیدبک حالت پایدارسازی انجام میشود، باید تمامی حالتها اندازهگیری شده و در دسترس باشند. در برخی از سیستمهای کنترل، امکان به کارگیری کنترل کننده فیدبک حالت وجود ندارد.
