 مرجع مهندسی كنترل | دانش با کیفیت در مرز علم
مرجع مهندسی كنترل | دانش با کیفیت در مرز علم

در سری فیلمهای حاضر دقیقا این مشکل مدنظر قرار گرفته و هدف طراحی یک کنترلکننده مقاوم برای سیستمهای خطی تحت تاثیر اغتشاش فقط با استفاده از یک یا چند خروجی سیستم است.

یک کنترل کننده مقاوم دینامیک برای سیستمهای خطی تحت نامعینی پارامتری به گونهای طراحی میشود که فقط از خروجی (یا خروجی های) سیستم برای کنترل استفاده میکند و نیازی به تمام حالتها ندارد.

همونطور که میدانید در سیستمهایی که با کنترل کننده فیدبک حالت پایدارسازی انجام میشود، باید تمامی حالتها اندازهگیری شده و در دسترس باشند. در برخی از سیستمهای کنترل، امکان به کارگیری کنترل کننده فیدبک حالت وجود ندارد.

در این سری جلسات برای این سیستمها که کلی تر هم هستند، LMI های مورد نیاز برای بدست آوردن بهره کنترل کننده فیدبک حالت جهت حذف اثر نامعینی پارامتری و همچنین تضعیف اغتشاش محاسبه خواهند شد.
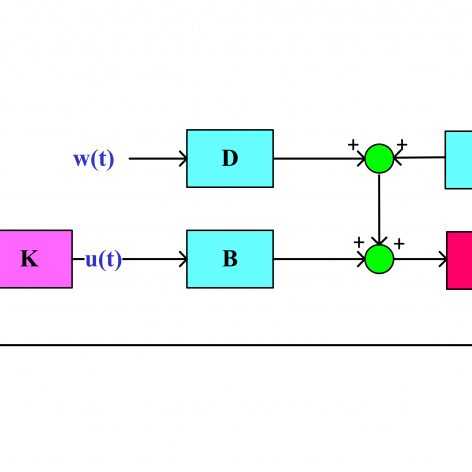
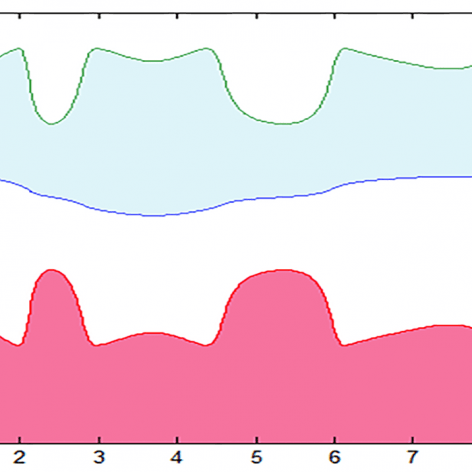
در بسیاری از سیستمهای کنترل سیگنالهای مزاحمی به نام اغتشاش وجود دارند که عملکرد حلقه بسته را تحت تاثیر قرار میدهند و عموما ما اطلاع چندانی از ماهیت آنها نداریم. تنها چیزی که از آنها میدانیم این است که دارای انرژی محدود هستند و بینهایت نیستند.

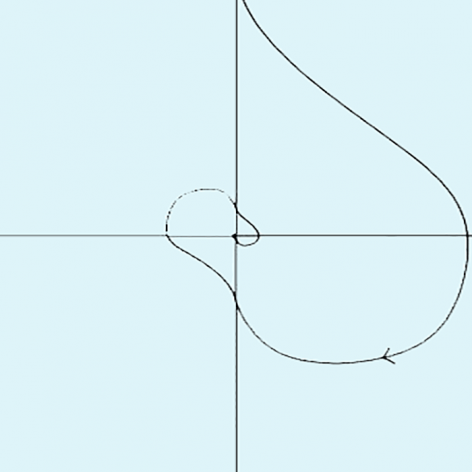
کنترل مقاوم به دلیل کاربردهای خیلی زیاد یکی از حوزه های مهم در تئوری کنترل محسوب میشود. عموما وقتی صحبت از کنترل مقاوم میشود همه به یاد ∞H و LFT و کلی ریاضیات پیچیده مثل تعریف نرم ها و فضاهای علمی تخیلی دیگر (مثل فضای هاردی) میافتند.
در این پست انواع مد لغزشی مرتبه بالاتر (HOSMC) قرار داده می شود. انواع مد لغزشی مرتبه بالاتر که قرار است به صورت فیلم آموزشی در این پست قرار داده شود به صورت زیر می باشند:مد لغزشی مرتبه دو،مد لغزشی دینامیک،مد لغزشی ترمینال
یکی از روشهایی که میشه باهاش مد لغزشی رو تا حدی بهبود داد و نواقص اون رو برطرف کرد مد لغزشی فازی (fuzzy sliding mode) هست. در این پست سعی کردیم روش فازی رو با مد لغزشی تلفیق کنیم.
درس سسیتمهای کنترل دیجیتال (Digital Control Systems) یکی از مهمترین دروس مهندسی برق-کنترل است که دانشجویان این رشته در دوره کارشناسی یا ارشد این درس سه واحدی را میگذرانند.
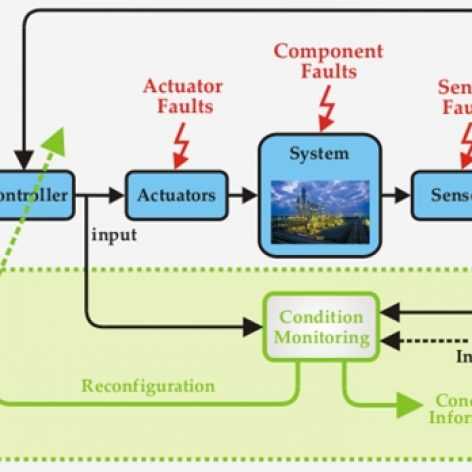
در این پست، اولین جلسه از سری جلسات “مبانی سیستم های تحمل پذیر عیب” رو براتون گذاشتیم که مقدماتی رو در این مورد ارایه می کنیم. تاریخچه و روند تحقیقاتی تو این زمینه خیلی خلاصه بیان شده و اصطلاحاتی رو تو این زمینه ارایه کردیم.
احتمالا برای شما هم پیش اومده که در یک مقاله یا کتاب به جایی رسیدید که باید یک ناتساوی ماتریسی خطی (یا LMI) رو حل کنید و در بدر دنبال یک نفر هستید تا در کوتاهترین زمان ممکن حل این نوع ناتساوی ها رو به شما یاد بدهد.

در این پست فیلم آموزش مد لغزشی طبق کتاب اسلوتین قرار داده میشود. کتاب اسلوتین رو اگه خونده باشید متوجه خواهید شد که بسیاری از مطالب این فصل گنگ هستند و نیاز به توضیحات بیشتر دارند.
بطور کلی روش حساب تغییرات به مساله غیر خطی با شرایط حدی در دو نقطه مجزا منتهی می شود که برای بدست آوردن قانون کنترل بهینه و یا حتی یک کنترل بهینه حلقه باز نمی تواند بصورت تحلیلی حل شود.

Adaptive control of uncertain nonlinear systems using mixed backstepping and Lyapunov redesign techniques کنترل تطبیقی سیستم های غیرخطی نامعین با استفاده از…
در این پست ایده حل تلفیق کنترل کننده های پسگام و مد لغزشی قرار داده شده است. تلفیق بعضی از کنترل کننده ها با هم کار ساده ای به شمار میره. بعنوان مثال تلفیق ژنتیک با کنترل کننده مد لغزشی، فازی و گام به عقب و …..
