جلسه اول: در این جلسه سیمولینکی که در جلسه پنجم از تدریس شبیه سازی هواپیما از مباحث خانم مهندس رشیدی نوشته شده به صورت کد ام فایل متلب با استفاده از روش انتگرال گیری خود متلب نوشته شده است.
محتویات دانلود: فیلم آموزشی، پاورپوینت، فایل متلب
حجم کل فایل: 132 مگابایت
مدت زمان آموزش: 51 دقیقه
جلسه دوم: در این جلسه نحوه تبدیل یک معادله دیفرانسیل به یک معادله انتگرالی و همینطور انتگرال گیری به روش اویلر توضیح داده شده است و در نهایت کد ام فایل متلب با استفاده از روش انتگرال گیری اویلر برای سیمولینک جلسه قبل نوشته شده است.
محتویات دانلود: فیلم آموزشی، پاورپوینت، فایل متلب
حجم کل فایل: 108 مگابایت
مدت زمان آموزش: 44 دقیقه
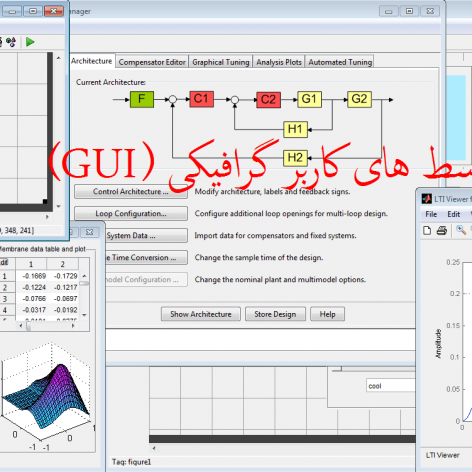
جلسه سوم: در این جلسه انتگرال گیری به دو روش ذوذنقه ای و رانگ کوتای مرتبه 4 توضیح داده شده است و کد ام فایل متلب با استفاده از هر دو روش برای سیمولینک جلسه قبل نوشته شده است. در نهایت هم یک واسط گرافیکی(GUI) تولید شده که هر چهار روش انتگرال گیری داخل آن پیاده شده اند.
محتویات دانلود: فیلم آموزشی، پاورپوینت، فایل متلب
حجم کل فایل: 115 مگابایت
مدت زمان آموزش: 43 دقیقه
پیش نمایش جلسه سوم:
جلسه چهارم: در این جلسه سیمولینکی که در جلسه هفتم از تدریس شبیه سازی هواپیما نوشته شده به صورت کد ام فایل متلب با استفاده از هر چهار روش انتگرال گیری(هم برای Looke up Table و هم برای موتورهای هواپیما) نوشته شده است. در نهایت هم برای هر کدام یک واسط گرافیکی تولید شده که هر چهار روش انتگرال گیری داخل آن پیاده شده اند.
محتویات دانلود: فیلم آموزشی، پاورپوینت، فایل متلب
حجم کل فایل: 155 مگابایت
مدت زمان آموزش: 58 دقیقه
جلسه پنجم: از این جلسه به بعد، از فصل هشتم به بعد کتاب Roskam که مربوط به مباحث کنترلی هواپیما است، تدریس می شود که کاملا هم مجزا از پارت یک می باشد. تنها چیزی که از پارت یک مورد نیاز می باشد، صرفا توابع تبدیل هواپیما در شرایط مختلف پروازی است که به عنوان مقدمه ای برای این جلسات در نظر گرفته می شوند.
در فصل هشتم کتاب تئوری و کاربردهای دیاگرام بود مورد بررسی قرار گرفته اند.
در این جلسه پاسخ فرکانسی سیستم های خطی مورد بررسی قرار گرفته اند. به این صورت که یک ورودی سینوسی با یک دامنه و فرکانس مشخص به یک سیستم اعمال شده و با محاسبه پاسخ، اختلاف فاز و دامنه بین ورودی و خروجی محاسبه می شود. همینطور دو روش تبدیل یک تابع تبدیل به کسرهای جزئی، همچنین دو روش محاسبه پاسخ حوزه زمان با استفاده از حوزه فرکانس بیان شده است.
محتویات دانلود: فیلم آموزشی، پاورپوینت، فایل متلب
حجم کل فایل: 181مگابایت
مدت زمان آموزش: 82 دقیقه
پیش نمایش جلسه پنجم:
جلسه ششم: در این جلسه پاسخ فرکانسی سیستم های خطی با استفاده از تابع تبدیل حلقه باز مورد بحث قرار گرفته است و نمودار اندازه و فاز برای توابع تبدیل مرتبه اول و دوم بر حسب فرکانس بدست آمده اند.
محتویات دانلود: فیلم آموزشی، پاورپوینت، فایل متلب
حجم کل فایل: 182 مگابایت
مدت زمان آموزش: 80 دقیقه
پیش نمایش جلسه ششم:
جلسه هفتم: در این جلسه نحوه بدست آوردن پاسخ فرکانسی توابع تبدیل با استفاده از مجانبها توضیح داده شده است. توابع تبدیل مورد بحث در این جلسه عبارتند از: مشتق گیر، انتگرال گیر و توابع تبدیل مرتبه اول. همینطور کدهای متلب متناسب با درس نوشته و توضیح داده شده اند. در نهایت هم یک واسط گرافیکی(GUI) تولید شده که برای هر تابع تبدیل دلخواهی که قطب های مختلط نداشته باشد، نمودار اندازه و فاز آن را به همراه مجانبهایش رسم می کند.
محتویات دانلود: فیلم آموزشی، پاورپوینت، فایل متلب
حجم کل فایل: 218 مگابایت
مدت زمان آموزش: 81 دقیقه
پیش نمایش جلسه هفتم:
جلسه هشتم: در این جلسه نحوه بدست آوردن پاسخ فرکانسی توابع تبدیل مرتبه دوم با استفاده از مجانبها توضیح داده شده است. همینطور کدهای متلب متناسب با درس نوشته و توضیح داده شده اند. در نهایت هم دو واسط گرافیکی(GUI) تولید شده است.
- واسط گرافیکیی که نمودار اندازه و فاز یک تابع تبدیل مرتبه دو استاندارد را به همراه مجانبهایش رسم می کند. در این واسط دو تا مارکرهم(یکی برای فرکانس شکست و یکی هم برای نسبت میرایی) قرار داده شده است که با تغییر آنها(و در نتیجه تغییر تابع تبدیل)، به طور همزمان پاسخ فرکانسی هم تغییر می کند و اثر این دو پارامتر روی پاسخ فرکانسی خیلی خوب دیده می شود.
- واسط گرافیکیی که نمودار اندازه و فاز یک تابع تبدیل دلخواه از هر مرتبه ای را رسم می کند.
محتویات دانلود: فیلم آموزشی، پاورپوینت، فایل متلب
حجم کل فایل: 191 مگابایت
مدت زمان آموزش: 67 دقیقه
پیش نمایش جلسه هشتم:
جلسه نهم: در این جلسه کاربرد دیاگرام بود در هواپیما توضیح داده شده است. در نهایت هم یک واسط گرافیکی(GUI) تولید شده است که دیاگرام بود هر تابع تبدیل دلخواهی را به همراه مجانب های مرتبه اول و دوم تشکیل دهنده آن تابع تبدیل، همینطور مجانب کلی آن تابع تبدیل را رسم می کند.
محتویات دانلود: فیلم آموزشی، پاورپوینت، فایل متلب
حجم کل فایل: 158 مگابایت
مدت زمان آموزش: 63 دقیقه
پیش نمایش جلسه نهم:
جلسه دهم: در این جلسه در بخش 8-4-2 نمودار بود توابع تبدیل هواپیما در 2 کانال سمت و غلت برای زوایای بتا، رول و سای به همراه نرم افزار متلب نمایش و توضیح داده شده اند. پاسخ ها در فرکانس های شکست مودهای اسپیرال، رول و داچ رول با هم مقایسه شده اند. در نهایت هم یک واسط گرافیکی تولید شده که نمودار بود هر نوع تابع تبدیلی را به همراه مجانب هایش رسم می کند.
در بخش 8-5 هم کاربرد معکوس دیاگرام بود توضیح داده شده است. به این صورت که اگر بدست آوردن تابع تبدیل یک سیستم پیچیده باشد، می توان با استفاده از یک ورودی سینوسی، خروجی سیستم را بدست آورده و از طریق نمودار بود بدست آمده، تابع تبدیل سیستم را بدست آورد.
محتویات دانلود: فیلم آموزشی، پاورپوینت، فایل متلب، واسط گرافیکی
حجم کل فایل: 226 مگابایت
مدت زمان آموزش: 80 دقیقه
پیش نمایش جلسه دهم:
جلسه یازدهم: در این جلسه فصل 9 کتاب شروع می شود. توضیحاتی راجع به سیستم های کنترل فیدبک و همین طور اهدافی که از این سیستم ها مورد انتظار است، داده می شود. فیدبک های مورد استفاده در این سیستم ها معرفی می شود. در بخش 9-1 سیستم فنر، جرم، دمپر به عنوان مثالی از سیستم کنترل فیدبک توضیح داده می شود. در بخش 9-2 هم سیستم حلقه بسته یاو دمپر جهت افزایش دمپینگ سیستم مورد بررسی قرار می گیرد.
محتویات دانلود: فیلم آموزشی، پاورپوینت
حجم کل فایل: 149 مگابایت
مدت زمان آموزش: 61 دقیقه
جلسه دوازدهم: در این جلسه در بخش 9-3-1 قواعد اساسی جهت رسم نمودار مکان ریشه بیان می شوند.
محتویات دانلود: فیلم آموزشی، پاورپوینت
حجم کل فایل: 153 مگابایت
مدت زمان آموزش: 61 دقیقه
جلسه سیزدهم: در این جلسه در بخش 9-3-2 نحوه بدست آوردن مجانب های مکان ریشه توضیح داده شده اند. محل تلاقی مجانب ها، همینطور زاویه مجانب ها با محور حقیقی بدست آمده اند. در نهایت هم نحوه بدست آوردن زاویه خروج از قطب ها و ورود به صفرهای تابع تبدیل حلقه باز بیان شده است.
محتویات دانلود: فیلم آموزشی، پاورپوینت
حجم کل فایل: 130 مگابایت
مدت زمان آموزش: 51 دقیقه
جلسه چهاردهم: در این جلسه مثالی راجع به رسم نمودار مکان هندسی بیان شده است. در طول مثال، مجانبها، زوایای خروج از قطب ها و ورود به صفرها بدست آمده اند. نحوه بدست آوردن نقاط شکست بیان شده است. همینطور محل تلاقی مکان با محور موهومی با دو روش، یکی جاگذاری فرکانس به جای متغیر لاپلاس و دیگری هم با استفاده از جدول راث بدست آمده اند.
محتویات دانلود: فیلم آموزشی، پاورپوینت، واسط گرافیکی
حجم کل فایل: 185 مگابایت
مدت زمان آموزش: 73 دقیقه
جلسه پانزدهم: در این جلسه کاربرد روش نمودار بود در تحلیل سیستم کنترل مورد بررسی قرار گرفته است. تعاریف فرکانس قطع بهره، فرکانس قطع فاز، حد بهره و حد فاز بیان شدند و مقادیرشان در دو مثال با استفاده از متلب بدست آمدند. در نهایت هم نکته ای در مورد رسم مکان هندسی بیان و نحوه رسم مکان هندسی شکل 9.3 بیان شد.
محتویات دانلود: فیلم آموزشی، پاورپوینت، فایل متلب
حجم کل فایل: 146 مگابایت
مدت زمان آموزش: 60 دقیقه
جلسه شانزدهم: روش مکان هندسی و نمودار بود هر دو روشهای حوزه فرکانس هستند. از آن طرف، سیستم های کنترل واقعی در حوزه زمان کار می کنند. ارتباط بین حوزه فرکانس و حوزه زمان در این جلسه بیان شده است. این ارتباط برای توابع تبدیل مختلف انجام و در نهایت هم یک واسط گرافیکی معرفی شده است که در هر تابع تبدیل، اثر تغییر پارامترهای تابع تبدیل، در حوزه زمان نشان داده شده است.
محتویات دانلود: فیلم آموزشی، پاورپوینت، واسط گرافیکی
حجم کل فایل: 177 مگابایت
مدت زمان آموزش: 66 دقیقه
پیش نمایش جلسه شانزدهم:
جلسه هفدهم: در این جلسه مشخصات حوزه فرکانس سیستم مانند حدود پایداری، پهنای باند و ...، مشخصات حوزه زمان مانند فراجهش، زمان صعود و ...، همینطور مشخصات خطا بیان شده اند. نوع سیستم، همینطور ضرایب خطای موقعیت، سرعت و شتاب برای یک سیستم فیدبک واحد و یک سیستم کلی بیان شدند. فایل های متلب مرتبط نوشته شدند. در نهایت هم حساسیت سیستم به هر یک از پارامترهایش توضیح داده شدند.
محتویات دانلود: فیلم آموزشی، پاورپوینت، فایل متلب
حجم کل فایل: 177 مگابایت
مدت زمان آموزش: 72 دقیقه
جلسه هجدهم: در این جلسه چند تا از کاربردهای طراحی سیستم کنترل فیدبک مانند تخصیص قطب، جبران کننده لگ(پس فاز) و ... بیان شده اند. توضیحاتی راجع به سیستم های فیدبک چند حلقه ای داده شده است. فایل های متلب مربوطه تولید شده اند. در نهایت هم یک واسط گرافیکی در متلب جهت تنظیم قطب جبران کننده تولید شده است که به کاربر این امکان را می دهد که با تغییر قطب جبران کننده و بهره سیستم برای هر تابع تبدیل دلخواهی، به طور همزمان نمودار مکان هندسی و بود سیستم حلقه باز را ببیند. همینطور مکان قطب های حلقه بسته هم در نمودار مکان هندسی مشخص شده است.
محتویات دانلود: فیلم آموزشی، پاورپوینت، فایل متلب، واسط گرافیکی
حجم کل فایل: 196 مگابایت
مدت زمان آموزش: 73 دقیقه
پیش نمایش جلسه هجدهم:
جلسه نوزدهم: در این جلسه چند کاربرد دیگر از کاربردهای طراحی سیستم کنترل فیدبک مانند جبران کننده لید-لگ(پیش فاز-پس فاز) و همین طور حذف صفر و قطب بیان شده اند. فایل های متلب مربوطه تولید شده اند. در نهایت هم یک واسط گرافیکی در متلب جهت تنظیم قطب جبران کننده لید لگ تولید شده است که به کاربر این امکان را می دهد که با تغییر قطب جبران کننده و بهره سیستم برای هر تابع تبدیل دلخواهی، به طور همزمان نمودار مکان هندسی و بود سیستم حلقه باز را ببیند. همینطور مکان قطب های حلقه بسته هم در نمودار مکان هندسی مشخص شده است.
محتویات دانلود: فیلم آموزشی، پاورپوینت، فایل متلب، واسط گرافیکی
حجم کل فایل: 148 مگابایت
مدت زمان آموزش: 55 دقیقه
جلسه بیستم: در این جلسه از دیگر کاربردهای طراحی سیستم کنترل فیدبک، کانکتورهای ریشه برای صفر و قطب های متغیر بیان شده است. به این صورت که اگر بخواهیم نمودار مکان هندسی را به ازای تغییرات یک قطب و یا صفری از سیستم بررسی کنیم، چگونه این کار انجام می شود که این کار به 2 صورت انجام شده و فایل های متلب مربوطه هم تولید شده اند.
محتویات دانلود: فیلم آموزشی، پاورپوینت، فایل متلب
حجم کل فایل: 137 مگابایت
مدت زمان آموزش: 50 دقیقه
جلسه بیستم و یکم: در این جلسه کل فصل 10 کتاب تدریس شده است. تابع تبدیل خلبان بدست آمده و با استفاده از مدل بدست آمده، مباحث مربوط به کنترل زاویه رول و فراز بیان شده اند. فایل های متلب مربوطه هم تولید شده اند.
محتویات دانلود: فیلم آموزشی، پاورپوینت، فایل متلب
حجم کل فایل: 209 مگابایت
مدت زمان آموزش: 78 دقیقه
جلسه بیستم و دوم: در این جلسه فصل 11 کتاب شروع می شود. مقداری از مبحث میراگرهای سمت بیان شد. مدار واش اوت(washout circuit) مورد بررسی قرار گرفت. فایل های متلب مربوطه تولید شدند و در نهایت هم یک واسط گرافیکی جهت رسم مکان هندسی، نمودار بود و پاسخ پله سیستم حلقه بسته برای هر دو حالت فیدبک واحد و غیر واحد معرفی شد.
محتویات دانلود: فیلم آموزشی، پاورپوینت، فایل متلب، واسط گرافیکی
حجم کل فایل: 138 مگابایت
مدت زمان آموزش: 53 دقیقه
پیش نمایش جلسه بیست و دوم:
جلسه بیستم و سوم: در این جلسه ادامه مبحث میراگرهای سمت بیان شد. اثر انحراف زاویه ژایرو مورد بررسی قرار گرفت. فایل های متلب مربوطه تولید شدند و در نهایت هم یک واسط گرافیکی جهت رسم مکان هندسی، نمودار قطب و صفر و پاسخ پله سیستم حلقه بسته جهت بررسی اثر انحراف زاویه ژایرو معرفی شد. همینطور مبحث میراگرهای پیچ هم به همراه فایل های متلب بیان شد.
محتویات دانلود: فیلم آموزشی، پاورپوینت، فایل متلب، واسط گرافیکی
حجم کل فایل: 146 مگابایت
مدت زمان آموزش: 52 دقیقه
پیش نمایش جلسه بیست و سوم:
جلسه بیست و چهارم: در این جلسه سیستم افزاینده پایداری برای سه نوع فیدبک زاویه حمله و فیدبک ضریب بار در کانال طولی و فیدبک زاویه سرش جانبی در کانال عرضی مورد بحث قرار گرفته است. همینطور مقدمه ای راجع به سیستم های اتوپایلوت بیان شده است. فایل های متلب مربوطه هم تولید شده اند.
محتویات دانلود: فیلم آموزشی، پاورپوینت، فایل متلب
حجم کل فایل: 104 مگابایت
مدت زمان آموزش: 39 دقیقه
جلسه بیست و پنجم: در این جلسه مودهای اتوپایلوت طولی بحث شده اند. مود نگهدارنده وضعیت پیچ به طور کامل بیان شد. در بررسی مثالهای ارائه شده، دیاگرام بلوکی دو حلقه ای مورد بررسی قرار گرفت. اثر قطب سروو، شرایط پروازی و تابع تبدیل کامل به جای تقریبی روی عملکرد حلقه بسته مورد بررسی قرار گرفت. در نهایت هم یک واسط گرافیکی معرفی شد که اثر قطب سروو و بهره های داخلی و خارجی یک دیاگرام بلوکی دو حلقه ای را در نمودار مکان و عملکرد حلقه بسته نشان می دهد.
محتویات دانلود: فیلم آموزشی، پاورپوینت، فایل متلب، واسط گرافیکی
حجم کل فایل: 186 مگابایت
مدت زمان آموزش: 69 دقیقه
پیش نمایش جلسه بیست و پنجم:
جلسه بیست و ششم: در این جلسه، از مبحث مودهای اتوپایلوت طولی، مود نگهدارنده ارتفاع به طور کامل بیان شد. تابع تبدیل ارتفاع به الویتور بدست آمد. مود نگهدارنده سرعت هواپیما هم بیان شد. فایل های متلب مربوطه تولید شدند و در خلال تدریس هم یک واسط گرافیکی جهت رسم مکان هندسی، نمودار بود و پاسخ پله سیستم حلقه بسته معرفی شد و اثر تغییر پارامترهای سیستم روی این نمودارها بررسی شد.
محتویات دانلود: فیلم آموزشی، پاورپوینت، فایل متلب، واسط گرافیکی
حجم کل فایل: 243 مگابایت
مدت زمان آموزش: 84 دقیقه
جلسه بیست و هفتم: در این جلسه، سیستم CONTROL WHEEL STEERING یا (CWS) مورد بررسی قرار گرفت. دیاگرام بلوکی دو حلقه ای متناظر با آن نشان داده شد. فایل های متلب مربوطه نوشته شدند و نحوه پایدار کردن آن با سه روش، استفاده از بهره های داخلی و خارجی، استفاده از جبران کننده در حلقه داخلی و استفاده از جبران کننده در حلقه خارجی بیان شد و با استفاده از یک واسط گرافیکی، اثر تغییر بهره های داخلی و خارجی روی پاسخ خروجی مورد بررسی قرار گرفت.
محتویات دانلود: فیلم آموزشی، پاورپوینت، فایل متلب، واسط گرافیکی
حجم کل فایل: 204 مگابایت
مدت زمان آموزش: 73 دقیقه
پیش نمایش جلسه بیست و هفتم:
جلسه بیست و هشتم: در این جلسه، در بخش 11.6، مودهای اتوپایلوت عرضی سمتی هواپیما شامل نگهدارنده های زاویه رول، سمت و نرخ چرخش در ارتفاع و سرعت ثابت مورد بررسی قرار گرفتند. پایداری آنها مورد بررسی قرار گرفتند و نحوه پایدار کردن آنها با استفاده از بهره های داخلی و خارجی بیان شدند و فایل های متلب مربوطه هم در حین تدریس نوشته شدند.
محتویات دانلود: فیلم آموزشی، پاورپوینت، فایل متلب
حجم کل فایل: 154 مگابایت
مدت زمان آموزش: 52 دقیقه
جلسه بیست و نهم: در این جلسه، در بخش 11.7، در بحث مودهای ناوبری طولی هواپیما، مود نگهدارنده مسیر فرود بیان شد. توابع تبدیل و دیاگرام بلوکی 3 حلقه ای متناظر با آن بدست آمد. پایداری سیستم حلقه بسته مورد بررسی قرار گرفت. فایل های متلب مربوطه نوشته شدند. در نهایت هم مقداری راجع به پایداری سیستم های حلقه بسته در حالت کلی بحث شد و قضیه ای هم در این زمینه در پاسخ به این سوال که آیا همواره برای یک تابع تبدیل در حلقه بسته می توان یک کنترل کننده طراحی کرد یا نه، بیان شد.
محتویات دانلود: فیلم آموزشی، پاورپوینت، فایل متلب
حجم کل فایل: 164 مگابایت
مدت زمان آموزش: 60 دقیقه
جلسه سی ام: در این جلسه، ادامه بحث پایداری سیستم های حلقه بسته بیان شد. قضیه ای در این زمینه در پاسخ به این سوال که آیا می توان همواره با استفاده از یک کنترل کننده پایدار سیستم حلقه بسته را پایدار کرد یا نه، بیان شد. در نهایت هم برای سیستم جلسه قبل یک کنترل کننده طراحی شد. فایل های متلب مربوطه نوشته شدند و دو واسط هم در این زمینه تولید شدند.
محتویات دانلود: فیلم آموزشی، پاورپوینت، فایل متلب، واسط گرافیکی
حجم کل فایل: 133 مگابایت
مدت زمان آموزش: 53 دقیقه
جلسه سی و یکم: در این جلسه، در بحث مودهای ناوبری طولی هواپیما، مود فلر(لندینگ) اتوماتیک بیان شد. توابع تبدیل و دیاگرام بلوکی 4 حلقه ای متناظر با آن بدست آمد. با استفاده از ام فایل متلب بهره هر یک از حلقه ها طوری تعیین شدند که سیستم حلقه بسته کل پایدار شود. در انتها هم یک واسط 4 حلقه ای معرفی شد تا با استفاده از تغییر هر یک از بهره ها و به طور همزمان دیدن پاسخ خروجی به پاسخ مطلوب برسیم.
محتویات دانلود: فیلم آموزشی، پاورپوینت، فایل متلب، واسط گرافیکی
حجم کل فایل: 134 مگابایت
مدت زمان آموزش: 46 دقیقه
پیش نمایش جلسه سی و یکم:
جلسه سی و دوم: در این جلسه، بخش 11.8، مودهای ناوبری عرضی- سمتی هواپیما به طور کامل بیان شد. توابع تبدیل و دیاگرام بلوکی متناظر با آن بدست آمد. پایداری آنها مورد بررسی قرار گرفتند و فایل های متلب مربوطه هم در حین تدریس نوشته شدند.
محتویات دانلود: فیلم آموزشی، پاورپوینت، فایل متلب
حجم کل فایل: 137 مگابایت
مدت زمان آموزش: 47 دقیقه
جلسه سی و سوم: سیستم های کنترل فیدبکی که تا بحال بحث کردیم، ساختارهایی بودند که در هر لحظه تنها یک متغیر به یک کنترلر فیدبک می شدند. در واقعیت، شرایطی بوجود می آید که در هر لحظه چند متغیر به چند کنترلر فیدبک می شوند. در این جلسه در بخش 11.9، خلاصه ای از این سیستم ها مورد بحث واقع شدند و برای نشان دادن پیچیدگی های ریاضی، تابع تبدیل دو سیستم ساده بدست آمد.
در ادامه هم با توجه به دو قضیه ای که در جلسات قبل بیان شد، برای یک تابع تبدیل داده شده، روش طراحی دو کنترل کننده متفاوت پایدار بیان شد و فایل های متلب مربوطه هم نوشته شدند.
محتویات دانلود: فیلم آموزشی، پاورپوینت، فایل متلب
حجم کل فایل: 173 مگابایت
مدت زمان آموزش: 65 دقیقه
پیش نمایش جلسه سی و سوم:
جلسه سی و چهارم: در این جلسه کنترل کننده های پی آی دی(PID) مورد بحث و بررسی قرار گرفته و چگونگی استفاده از آنها در طراحی سیستم های کنترلی حلقه بسته به نمایش گذاشته شده اند. این کنترل کننده ها با وجود محدودیت هایی که دارند، در صنعت به وفور مورد استفاده قرار می گیرند و از لحاظ کاربردی دارای اهمیت زیادی می باشند.
محتویات دانلود: فیلم آموزشی، پاورپوینت
حجم کل فایل: 104 مگابایت
مدت زمان آموزش: 43 دقیقه
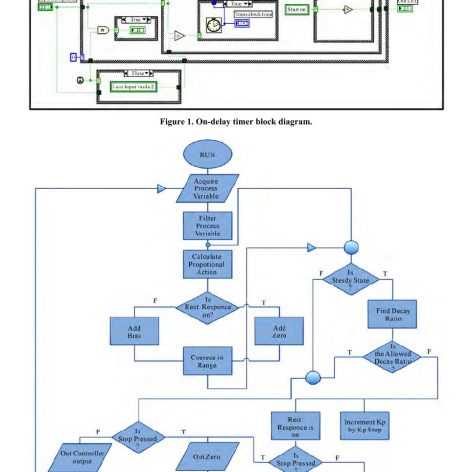
جلسه سی و پنجم: در این جلسه چگونگی بدست آوردن ضرایب کنترل کننده پی آی دی با استفاده از دو روش کهن و زیگلر- نیکولز توضیح داده شده است. فایل های متلب مربوطه نوشته شده اند و در نهایت هم با استفاده از واسط گرافیکیی که نوشته شده است، ضرایب بدست آمده از این دو روش تنظیم نهایی می شوند. همینطور ساختار متفاوتی از پی آی دی هم معرفی و توضیح داده شده است.
محتویات دانلود: فیلم آموزشی، پاورپوینت، فایل متلب، واسط گرافیکی
حجم کل فایل: 183 مگابایت
مدت زمان آموزش: 73 دقیقه
پیش نمایش جلسه سی و پنجم:
 مرجع مهندسی كنترل | دانش با کیفیت در مرز علم
مرجع مهندسی كنترل | دانش با کیفیت در مرز علم


محمد علی
سلام. وقت بخیر . در حال حاضر بیست و سه جلسه از آموزشهای کنترل هواپیما روی سایت قرار گرفته ولی هنوز چیزی از طراحی کنترل کننده در اون دیده نمیشه .
مهندس اباذر نورمحمدی
سلام
من طبق مباحث کتاب دارم پیش می رم. جلسات بعدی بیشتر به این مبحث پرداخته.
موفق باشید.
محمد علی
سلام . وقت بخیر . در این دوره جدید قرار بود ادامه درس خانم رشیدی تدریس بشه . یعنی طراحی کنترل کننده .با توجه به فایل هایی که من تهیه کردم هیچ کدوم داخلش نبود.
مهندس اباذر نورمحمدی
سلام وقت شما هم بخیر.
بله قراره که طراحی کنترل کننده تدریس بشه و ان شاءالله میشه ولی هنوز تکمیل نشده. سعی می کنم هر هفته ان شاءالله یک جلسه داخل سایت بذارم.