در این پست انواع مد لغزشی مرتبه بالاتر (HOSMC) قرار داده می شود. انواع مد لغزشی مرتبه بالاتر که قرار است به صورت فیلم آموزشی در این پست قرار داده شود به صورت زیر می باشند:
- مد لغزشی مرتبه دو
- مد لغزشی دینامیک
- مد لغزشی ترمینال
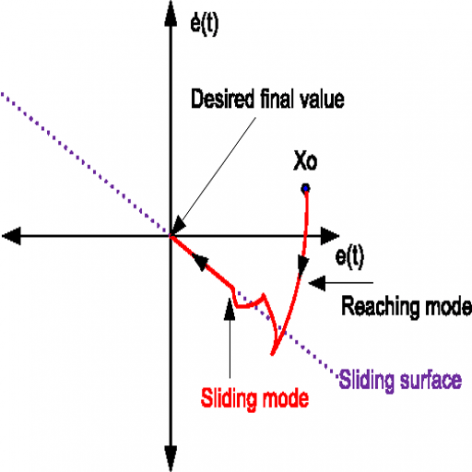
مد لغزشی کلاسیک یا معمولی یا مرتبه اول معایبی دارد که از آن جمله می توان به پدیده چترینگ، عدام طراحی برای سیستم های غیرآفین و بی نهایت بودن زمان ردیابی اشاره کرد. این معایب در مد لغزشی مرتبه بالاتر برطرف می شود. در واقع مد لغزشی مرتبه بالاتر نه تنها دارای محاسن مد لغزشی کلاسیک است بلکه باعث خطای ردیابی بهتر نسبت به مد لغزشی کلاسیم نیز می شود. سه تا از انواع پرکاربرد مد لغزشی که در اکثر مقالات اخیر به چشم می خورود مد لغزشی مرتبه دو ، مد لغزشی نهایی و مد لغزشی دینامیک می باشد. در این پست سعی شده است که این نوع از مد لغزشی همراه با شبیه سازی تشریح شود. پیش نیاز این جلسات، فیلم های آموزش مد لغزشی بر اساس کتاب اسلاتین هستش. که در صورتیکه آشنایی اولیه با مد لغزشی ندارید پیشنهاد می کنم این مجموعه رو از اینجا ببینید.
جلسه اول:
مقدمه و دسته بندی
در این جلسه به مقدمات مد لغزشی مرتبه بالا پرداخته شده است. ابتدا عیوب مد لغزشی کلاسیک به صورت مفصل بحث شده است سپس تاریخچه ای از مد لغزشی مرتبه بالاتر و اینکه ایده اولیه از کجا شروع شده و چطور پرورش پیدا کرده گفته شده است . در ادامه گفته شده که مد لغزشی مرتبه بالا چی هست و تعاریف مربوط به اون به زبان ساده بیان شده است و در نهایت انواع مد لغزشی مرتبه بالا دسته بندی شده است. این مجموعه بر اساس پایان نامه دکتری یکی از دانشجویان دکتری در یکی از دانشگاه های انگلیس گفته شده است.
مدت زمان آموزش: 47 دقیقه
محتویات دانلود: فیلم با کیفیت ۷۲۰p- پاورپوینت درس و پایان نامه مورد اشاره در فیلم
حجم محتویات دانلود: 70 مگابایت
جلسه دوم:
مد لغزشی دینامیک (Dynamic Sliding Mode)
در این جلسه به طراحی و شبیه سازی مد لغزشی دینامیک پرداخته شده است. دو روش برای طراحی سطح لغزش برای روش مد لغزشی دینامیک وجود داره. روش کنترل معادل و روش غیرمستقیم. روش دوم نیازی به این ندارد که سیستم آفین باشد و برای سیستم های غیر آفین نیز استفاده می شود و این یکی از قدرتهای روش مد لغزشی دینامیک است. پس از تشریح روش کنترل معادل، یک مثال به طور کامل بحث شده و پس از آن در نرم افزار متلب شبیه سازی شده است. از مزایای بی چون و چرای این روش حذف کامل چترینگ می باشد که این در شبیه سازی بوضوح نشان داده شده است.
مدت زمان آموزش: 69 دقیقه
محتویات دانلود: فیلم با کیفیت ۷۲۰p- پاورپوینت درس و ام فایل مثال مربوطه
حجم محتویات دانلود: 101 مگابایت
جلسه سوم:
مد لغزشی نهایی (Terminal Sliding Mode Control)
مشکل مد لغزشی دینامیک این بود که حالت ها در زمان بی نهایت به مقدار مطلوب خود می رسند. این مشکل در مد لغزشی کلاسیک نیز وجود داشت. از این جلسه به بعد در ارتباط با مد لغزشی هایی صحبت می کنیم که زمان همگرایی حالت ها به مقدار مطلوبشون محدود هست. در مد لغزشی کلاسیک سطح لغزش به صورت خطی بر حسب خطا نوشته می شد اما در این جا سطح لغزشی به صورت غیرخطی در نظر گرفته میشود. و مشکل زمان محدود نبودن را حل می کند. انواعی از مد لغزشی نهایی وجود دارد که در این جا به سه تا از مهترین آنها پرداخته شده است. مد لغزشی نهایی نرمال، مد لغزشی نهایی غیرتکین و مد لغزشی ترمینال سریع در این جلسه ارائه شده اند.
مدت زمان آموزش: 50 دقیقه
محتویات دانلود: فیلم با کیفیت ۷۲۰p- پاورپوینت درس
حجم محتویات دانلود: 70 مگابایت
جلسه چهارم:
مد لغزشی مرتبه دو (Second Order Sliding Mode Control)
ساده ترین نوع مد لغزشی مرتبه بالا، مد لغزشی مرتبه دو می باشد. که در این نوع از مد لغزشی تضمین میشود هم سطح لغزش و هم مشتق سطح لغزش صفر می شوند. الگوریتم های متفاوتی برای این نوع از مد لغزشی ارائه شده است. پنج الگوریتم در این جلسه بحث شده است. الگوریتم پیچشی، الگوریتم زیربهینه، الگوریتم تابع از قبل تعریف شده، الگوریتم رانش و الگوریتم فرا پیچشی یا سوپر تویستینگ (super twisting). در این بین الگوریتم سوپر تویستینگ طرفدار بیشتری دارد. اگه یه سرچ کوچیک توی گوگل یا ساینس دایرکت در مورد مد لغزشی مرتبه بالا بزنید خواهید دید اکثر مقالات در زمینه الگوریتم فراپیچشی هستند. بر این اساس در مورد این الگوریتم بحث بیشتری شده است.
مدت زمان آموزش: 59 دقیقه
محتویات دانلود: فیلم با کیفیت ۷۲۰p- پاورپوینت درس
حجم محتویات دانلود: 80 مگابایت
جلسه پنجم:
طراحی مد لغزشی دینامیک برای یک سیستم غیر آفین
در این جلسه به طراحی مد لغزشی دینامیک برای یک سیستم غیر آفین پرداختیم. خاطر گرامیتون هست که در جلسه دوم که برای مد لغزشی دینامیک دو روش _روش کنترل معادل و روش غیرمستقیم_ گفته شد تنها برای روش کنترل معادل یک مثال حل شد و برای روش دوم به دلیل افزایش حجم فیلم ، مقدور نبود که مثال حل بشه. در این جلسه به صورت مجزا برای سیستم های غیرآفین با استفاده از مد لغزشی دینامیک، کنترل کننده طراحی شده است. مثالی که در این جلسه در نظر گرفته شده است دارای دو متغیر حالت است که دینامیک داخلی پایداری دارد. پایداری دینامک صفر یا دینامیک داخلی بررسی شده است و سپس کنترل کننده طراحی شده و در نهایت در نرم افزار متلب شبیه سازی شده است. امیدوارم از این آموزش لذت ببرید.
مدت زمان آموزش: 48 دقیقه
محتویات دانلود: فیلم با کیفیت ۷۲۰p- پاورپوینت درس و ام فایل مربوطه
حجم محتویات دانلود: 74 مگابایت
۸۴۰,۰۰۰ تومان قیمت اصلی: ۸۴۰,۰۰۰ تومان بود.۵۹۷,۶۰۰ تومانقیمت فعلی: ۵۹۷,۶۰۰ تومان.Add to cart
مطالعه بیشتر
 مرجع مهندسی كنترل | دانش با کیفیت در مرز علم
مرجع مهندسی كنترل | دانش با کیفیت در مرز علم





امیر
باسلام
طبق وعده های قبلی قرار بود که مثالی از روش های مدلغزشی مرتبه بالاتر خصوصا سوپرتویستینگ حل کنید ولی متاسفانه با گذشت چندین ماه فعلا خبری از آزموش ها نیست.
به نظرم روش های تلفیقی تخمین و مدلغزشی مرتبه بالاتر رو شروع کنید با استقبال مواجه بشه چرا که اخیرا در بیشتر مقالات استفاده میشه و از طرفی اکثر روش های مدلغزشی رو مقالات پیاده شده و متاسفانه نمیشه زیاد روشون مانور داد.
باسپاس فراوان
مدیر سایتادمین سایت
@امیر,
سلام
بله تصورشو نمیکردم استقبال از ما اینقدر زیاد باشه. به همین خاطر درگیر کارهای جانبی سایت شدم. به امید خدا سرم که خلوت بشه همه چیو پوشش میدم
عذرخواهی میکنم بابت تاخیر بوچود اومده.
هدف ما حرکت به سمت مرز علم هستش . انشاالله موضوعاتی که شما فرمودین و موضوعات تخصصی تر رو در آینده پوشش میدیم
سپاس
قادری
با عرض سلام
من با کنترل مد لغزشی مرتبه اول یک سیگنال کنترلی به اسم CP بدست آوردم حالا می خواهم اون رو به یک تابع دیگر تزریق کنم
سیگنالی که برای تزریق نیاز دارم منحنی است که با دستور plot ( t , CP
بدست میاد دقت شود خود CP به درد پروژه نمی خورد
حال سوال اینجاست دستور پلات برای رسم منحنی است نه معادله ای که از آن برای تزریق در پروژه استفاده کنم
حال به چه نحوی می توانم از CP معادله ای بر حسب زمان بسازم که برای من نقش منحنی رسم شده CP بر حسب زمان رو بازی کند
البته لازم به ذکر است روش تقریب معادله که در منوی tools منحنی ها وجود دارد به درد پروژه من نمی خورد زیرا CPتابع ثابتی نیست و مرتبا در حال چترینگ می باشد
مدیر سایتادمین سایت
@قادری,
سلام
صورت سوال دقیقا مشخص نیست.اما اگه واقعا شما نیاز به یک معادله برحسب یک سری دیتا دارید و انتظار داشته باشید یک روشی وجود داشته باشه که براساس یک سری دیتاها یک معادله دقیق به شما بده باید بگم همچین روشی وجود نداره.
اما اگه بخواید اون دیتاها رو با یک معادله غیرخطی تقریب بزنید میتونید از یک معاله چند جمله ای با درجه دلخواه اینکارو بکنید. ولی چون سیگنال شما به سرعت در حال تغییره بعید به نظر میرسه تقریب خوبی از آب در بیاد. بنابراین به نظر من بدنبال این روش نباشید چون این همه تقریب کار شما رو در نهایت با تقریب بزرگتر مواجه میکنه.
سپاس
سیا
درود بر شما /
پیرو سوالی که راجب ترمینال اسلایدینگ برای سیستم های دینامیکی مرتبه سه از شما پرسیدم و شما این مقاله را پیشنهاد دادید:
An adaptive fast terminal sliding mode control combined
with global sliding mode scheme for tracking control
of uncertain nonlinear third-order systems
Auther :Saleh Mobayen
در این مقاله یک سوال برای من پیش آمد ْ و اون اینکه طراحی به شکلی انجام شده که مشتق u کنترلی بدست آمده و نه خود u ! یعنی اگه خودتون مقاله رو لطف کنید یه نگاه بندازید متوجه میشدید که منظورم چیه ، حالا چطوری باید از ,u دات که ورودی کنترلی طراحی شده است و خودشم شامل خود تابع U میشه استفاده کنیم ? بعد از طراحی باید چطوری u رو تزیق کنیم که مدلی که براش از این روش میخواستیم u بدست بیاوریم
با سپاس از زحماتی که همیشه با سوالاتم به شما میدم.
مدیر سایتادمین سایت
@سیا,
سلام
این موضوع در جلسه مربوط به مد لغزشی دینامیک مفصل توضیح داده شده. لطفا فیلم مورد نظر رو مشاهده کنید
سپاسگزارم
شراره
با عرض سلام
من یک تابع سینوسی هارمونیکی دارم که دارای تعداد زیادی نقاط ماکزیمم و مینیمم نسبی می باشد
می خواهم در بازه ی محدودی تعداد کل ماکزیمم های نسبی رو بدست بیاورم و از طریق آنها یک منحنی رسم کنم
فرمودید برای بازه محدود به آسانی می توان این کار را کرد
لطفا برای نوشتن دستور یا الگوریتم آن راهنمایی بفرمایید
مدیر سایتادمین سایت
@شراره,
سلام
اگه یه سینوسی هست که میتونید با مشتق به صورت دقیق ماکزیمم و مینمم های نسبی رو به صورت تحلیلی بدست بیارید و نیازی به روش های عددی نیست
شراره
بازه برای پیدا کردن نقاط ماکزیمم نسبی معلوم است
لطفا راهنمایی بفرمایید
مدیر سایتادمین سایت
@شراره,
سلام
درصورتیکه یک بردار داشته باشید و بدونید یک ماکزیمم داره میتونید از دستور max، ماکزیمم اون بردار رو بدست بیارید
شراره
با عرض سلام
می خواهم برای یک تابع که از یک مجموعه زیادی نقاط ماکزیمم و مینیمم تشکیل شده
تمامی نقاط ماکزیمم نسبی رو بدست بیاورم
آیا دستور و یا راهکاری برای آن وجود دارد؟؟
لطفا راهنمایی بفرمایید
مدیر سایتادمین سایت
@شراره,
سلام برای این هدف دروس زیر در دانشگاههای ارائه میشه
کنترل بهینه
کانوکس
روشهای هوشمند مثل عصبی و الگورتیم های عددی مثل نیوتن رافسون، ژنتیک ، مورچگان، پرندگان، قورباقه ها، استعماری و …
و هیچ کدوم هم تا به حال نتونستن تضمین بدن همه نقاط بهینه یا به اصطلاح ماکزیمم یا مینمم یک تابع رو میتونن بدن البته اینها با قید هستن
اما اگه بدونید در چه بازه ای ماکزیمم ها قرار دارن و حول و حوششون رو بدونید با متلب به راحتی میتونید حلش کنید
امیر
باسلام
اگر در روش طراحی سوپر توایستینگ ضریب u (گاما)به شکل یک تابع سینوسی باشد آنگاه با توجه به اینکه در فیلم آموزشی اشاره شده گاما باید مثبت باشد، آیا روش سوپرتوایستینگ قابل اعمال به این سیستم است؟
sdot=phi+gam*u
تشکر
مدیر سایتادمین سایت
@امیر,
سلام
ببینید ما در روش مد لغزشی کلاسیک میگیم اگه ضریب ساین از یک حدی بزرگتر باشه سیستم قطعا پایدار خواهد شد. ولی این به این معنی نیست که اگه کمتر از اون حد بگیریم دیگه پایدار نمیشه.
اینجا هم همچین حالتی داریم.
برای اینکه کمترین ضریب ممکن رو بدست بیارید که باعث پایداری میشه میتونید از الگوریتم های عددی استفاده کنید. البته برای سیستم مذکور که خیلی ساده هست میتونید با روش سعی و خطا اینکارو انجام بدید. به این ترتیب که از یک عدد بالا شروع کنید و بعد اینقدر کمش کنید تا در مرز پایداری و ناپایداری قرار بگیرید اونجا کمترین کای ممکن هستش. اونوقت اگه سینوسی که شما میخواید قرار بدید درصورتیکه حد پایینش یعنی منفی یک، در اون محدوده باشه سیستم پایدار باقی خواهد ماند. اما این به صورت تحلیلی بدست نیومده
سپاسگزارم
هانا
با عرض سلام خدمت اساتید ارجمند
می خواهم تابعی برای سرعت باد متغیر در محیط ام فایل متلب بنویسیم که مثلا مقدارش به طور تصادفی از 4 تا 10 تغییر بکنه
لطفا در مورد نحوه تعریف تابع فوق راهنمایی فرمایید
مدیر سایتادمین سایت
@هانا,
سلام
میتویند از دستور rand متلب که اعداد تصادفی با توزیع نرمال در بازه 0 تا 1 ایجاد میکنه استفاده کنید.
x = 6*rand(1,N)+4
6 = 10-4
دستور بالا یک بردار تصادفی یک در N تولید میکنه که تمام درایه هاش بین 4 و 10 هستند
البته اگه دیدین شباهتی با باد تولید شده در مقاله نداره باید هر چند تا از نمونه ها رو حذف کنید تا شکل یک باد واقعی در بیاد
هانا
با عرض سلام خدمت اساتید ارجمند
می خواهم تابعی برای سرعت باد متغیر در محیط ام فایل متلب بنویسیم
لطفا در مورد نحوه نوشتن تابع فوق راهنمایی فرمایید
سیا
درود دوتا مقاله خدمت شما ایمیل کردم که از روش فست ترمینال نان سینگولار برای سیستم مرتبه دو استفاده شده
خواهشی که از شما دارم اینکه لطف بفرمایید فقط توضیح بدید سطح خطا رو واسه یک سیستم مرتبه سه در جهت فست ترمینال نان سینگولار چطور تعریف کنم ! فقط سطح خطا رو اگه بگید با توجه به دوتا مقاله که قسمت سطح هاشون های لایت کردم واساتون برای سیستم مرتبه سه به چه شکل در میاد .
سپاس از شما.
مدیر سایتادمین سایت
@سیا,
سلام
ترمینال اسلایدینگ و خانواده آن برای سیستم های مرتبه دو هستند. اما این ربطی نداره که شما چند متغیر حالت داشته باشید.
ولی مقالاتی برای سیستم های مرتبه سه هم در این زمینه ارائه شده که میشه به مقاله زیر اشاره کرد
An adaptive fast terminal sliding mode control combined
with global sliding mode scheme for tracking control
of uncertain nonlinear third-order systems