در این پست انواع مد لغزشی مرتبه بالاتر (HOSMC) قرار داده می شود. انواع مد لغزشی مرتبه بالاتر که قرار است به صورت فیلم آموزشی در این پست قرار داده شود به صورت زیر می باشند:
- مد لغزشی مرتبه دو
- مد لغزشی دینامیک
- مد لغزشی ترمینال
مد لغزشی کلاسیک یا معمولی یا مرتبه اول معایبی دارد که از آن جمله می توان به پدیده چترینگ، عدام طراحی برای سیستم های غیرآفین و بی نهایت بودن زمان ردیابی اشاره کرد. این معایب در مد لغزشی مرتبه بالاتر برطرف می شود. در واقع مد لغزشی مرتبه بالاتر نه تنها دارای محاسن مد لغزشی کلاسیک است بلکه باعث خطای ردیابی بهتر نسبت به مد لغزشی کلاسیم نیز می شود. سه تا از انواع پرکاربرد مد لغزشی که در اکثر مقالات اخیر به چشم می خورود مد لغزشی مرتبه دو ، مد لغزشی نهایی و مد لغزشی دینامیک می باشد. در این پست سعی شده است که این نوع از مد لغزشی همراه با شبیه سازی تشریح شود. پیش نیاز این جلسات، فیلم های آموزش مد لغزشی بر اساس کتاب اسلاتین هستش. که در صورتیکه آشنایی اولیه با مد لغزشی ندارید پیشنهاد می کنم این مجموعه رو از اینجا ببینید.
جلسه اول:
مقدمه و دسته بندی
در این جلسه به مقدمات مد لغزشی مرتبه بالا پرداخته شده است. ابتدا عیوب مد لغزشی کلاسیک به صورت مفصل بحث شده است سپس تاریخچه ای از مد لغزشی مرتبه بالاتر و اینکه ایده اولیه از کجا شروع شده و چطور پرورش پیدا کرده گفته شده است . در ادامه گفته شده که مد لغزشی مرتبه بالا چی هست و تعاریف مربوط به اون به زبان ساده بیان شده است و در نهایت انواع مد لغزشی مرتبه بالا دسته بندی شده است. این مجموعه بر اساس پایان نامه دکتری یکی از دانشجویان دکتری در یکی از دانشگاه های انگلیس گفته شده است.
مدت زمان آموزش: 47 دقیقه
محتویات دانلود: فیلم با کیفیت ۷۲۰p- پاورپوینت درس و پایان نامه مورد اشاره در فیلم
حجم محتویات دانلود: 70 مگابایت
جلسه دوم:
مد لغزشی دینامیک (Dynamic Sliding Mode)
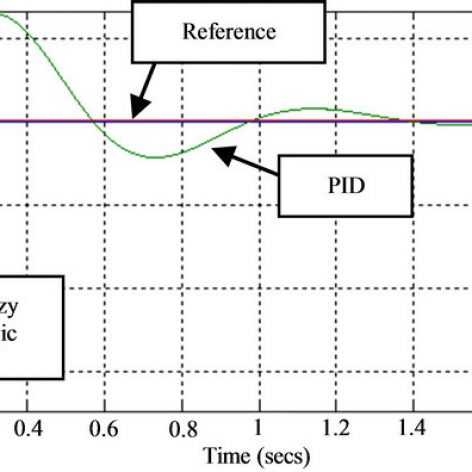
در این جلسه به طراحی و شبیه سازی مد لغزشی دینامیک پرداخته شده است. دو روش برای طراحی سطح لغزش برای روش مد لغزشی دینامیک وجود داره. روش کنترل معادل و روش غیرمستقیم. روش دوم نیازی به این ندارد که سیستم آفین باشد و برای سیستم های غیر آفین نیز استفاده می شود و این یکی از قدرتهای روش مد لغزشی دینامیک است. پس از تشریح روش کنترل معادل، یک مثال به طور کامل بحث شده و پس از آن در نرم افزار متلب شبیه سازی شده است. از مزایای بی چون و چرای این روش حذف کامل چترینگ می باشد که این در شبیه سازی بوضوح نشان داده شده است.
مدت زمان آموزش: 69 دقیقه
محتویات دانلود: فیلم با کیفیت ۷۲۰p- پاورپوینت درس و ام فایل مثال مربوطه
حجم محتویات دانلود: 101 مگابایت
جلسه سوم:
مد لغزشی نهایی (Terminal Sliding Mode Control)
مشکل مد لغزشی دینامیک این بود که حالت ها در زمان بی نهایت به مقدار مطلوب خود می رسند. این مشکل در مد لغزشی کلاسیک نیز وجود داشت. از این جلسه به بعد در ارتباط با مد لغزشی هایی صحبت می کنیم که زمان همگرایی حالت ها به مقدار مطلوبشون محدود هست. در مد لغزشی کلاسیک سطح لغزش به صورت خطی بر حسب خطا نوشته می شد اما در این جا سطح لغزشی به صورت غیرخطی در نظر گرفته میشود. و مشکل زمان محدود نبودن را حل می کند. انواعی از مد لغزشی نهایی وجود دارد که در این جا به سه تا از مهترین آنها پرداخته شده است. مد لغزشی نهایی نرمال، مد لغزشی نهایی غیرتکین و مد لغزشی ترمینال سریع در این جلسه ارائه شده اند.
مدت زمان آموزش: 50 دقیقه
محتویات دانلود: فیلم با کیفیت ۷۲۰p- پاورپوینت درس
حجم محتویات دانلود: 70 مگابایت
جلسه چهارم:
مد لغزشی مرتبه دو (Second Order Sliding Mode Control)
ساده ترین نوع مد لغزشی مرتبه بالا، مد لغزشی مرتبه دو می باشد. که در این نوع از مد لغزشی تضمین میشود هم سطح لغزش و هم مشتق سطح لغزش صفر می شوند. الگوریتم های متفاوتی برای این نوع از مد لغزشی ارائه شده است. پنج الگوریتم در این جلسه بحث شده است. الگوریتم پیچشی، الگوریتم زیربهینه، الگوریتم تابع از قبل تعریف شده، الگوریتم رانش و الگوریتم فرا پیچشی یا سوپر تویستینگ (super twisting). در این بین الگوریتم سوپر تویستینگ طرفدار بیشتری دارد. اگه یه سرچ کوچیک توی گوگل یا ساینس دایرکت در مورد مد لغزشی مرتبه بالا بزنید خواهید دید اکثر مقالات در زمینه الگوریتم فراپیچشی هستند. بر این اساس در مورد این الگوریتم بحث بیشتری شده است.
مدت زمان آموزش: 59 دقیقه
محتویات دانلود: فیلم با کیفیت ۷۲۰p- پاورپوینت درس
حجم محتویات دانلود: 80 مگابایت
جلسه پنجم:
طراحی مد لغزشی دینامیک برای یک سیستم غیر آفین
در این جلسه به طراحی مد لغزشی دینامیک برای یک سیستم غیر آفین پرداختیم. خاطر گرامیتون هست که در جلسه دوم که برای مد لغزشی دینامیک دو روش _روش کنترل معادل و روش غیرمستقیم_ گفته شد تنها برای روش کنترل معادل یک مثال حل شد و برای روش دوم به دلیل افزایش حجم فیلم ، مقدور نبود که مثال حل بشه. در این جلسه به صورت مجزا برای سیستم های غیرآفین با استفاده از مد لغزشی دینامیک، کنترل کننده طراحی شده است. مثالی که در این جلسه در نظر گرفته شده است دارای دو متغیر حالت است که دینامیک داخلی پایداری دارد. پایداری دینامک صفر یا دینامیک داخلی بررسی شده است و سپس کنترل کننده طراحی شده و در نهایت در نرم افزار متلب شبیه سازی شده است. امیدوارم از این آموزش لذت ببرید.
مدت زمان آموزش: 48 دقیقه
محتویات دانلود: فیلم با کیفیت ۷۲۰p- پاورپوینت درس و ام فایل مربوطه
حجم محتویات دانلود: 74 مگابایت
۸۴۰,۰۰۰ تومان قیمت اصلی: ۸۴۰,۰۰۰ تومان بود.۵۹۷,۶۰۰ تومانقیمت فعلی: ۵۹۷,۶۰۰ تومان.Add to cart
مطالعه بیشتر
 مرجع مهندسی كنترل | دانش با کیفیت در مرز علم
مرجع مهندسی كنترل | دانش با کیفیت در مرز علم





احمد عباسیان شهرابی
با سلام…واقعا ممنونم از آموزش های کامل و جامع تون…با آرزوی موفقیت روز افزون برای شما عزیزان
سلمان سنایی
سلام، کسی اطلاع دارد ایا مود لغزشی ترمینال نسبت به کلاسیک، چترینگ را کمتر میکند یا نه، اگر جواب مثبت هست مقالاتی هست برای ما ارسال کنید ممنون میشم، لطفا سریع تر پاسخ دهید
مدیر سایتادمین سایت
سلام سوال شما در این مجموعه آموزشی به صورت کامل پاسخ داده شده است. لطفا دانلود بفرمایید و این مجموعه را ملاحظه بفرمایید. با تشکر
سلمان سنایی
سلام، استاد اطلاعات کامل در مورد مود لغزشی ترمینال یا سریع با مثالی که شبیه سازی باشد واسه خرید هست
مدیر سایتادمین سایت
سلام در مورد مدلغزشی ترمینال یکی از جلسات توضیح داده شده است. منتها شبیه سازی انجام ندادم.
سلمان سنایی
سلام استاد گرامی، یه سوال داشتم ایا مود لغزشی ترمینال نسبت به کلاسیک، چترینگ رو کمتر میکند، اگه جواب مثبت هست مقالاتی هست که این موضوع رو گفته باشد ممنون میشم اون مقالات رو برای من بفرستید، و در سبد اطلاعات کاملتری که مود لغزشی ترمینال را توضیح و مثالی را شبیه سازی کرده باشد هست واسه خرید
مدیر سایتادمین سایت
سلام پاسخ شما در مجموعه آموزشی “انواع مد لغزشی مرتبه بالاتر” وجود دارد. لطفا این مجموعه را ملاحظه بفرمایید. با تشکر
سلمان سنایی
سلام من کدهای فعال سازی جلسه 2و 3 مود لغزشی ترمینال برام ارسال نشده لطفا ارسال کنید در لب تاب نمایش داده نمی شود
مدیر سایتادمین سایت
سلام و عرض ادب
لطفا به پشتیبان آنلاین پیام دهید
باتشکر
ابوالفضل
سلام من کد های سری فیلم های شناسایی سیستم فصل 2 و 3 ندارم ممنون میشم این سری کد ها رو دوباره برام ارسال بشن.
مسله دوم اینکه از دوستان مهندس هستن مقاله ترجمه کنن معرفی کنید برای بنده.
سپاس
مدیر سایتادمین سایت
سلام. در مورد شناسایی سوالتون رو در قسمت درس شناسایی بپرسید
محمد عبداله زاده
سلام اقای دکتر ببخشید برای انتخاب ضرایب a1,a2,a3 در معادله دینامیکی برای سطح لغزش برای یک سیستم مرتبه 3 چه شرطی برای انتخاب a1,a2,a3 وجود داره
مدیر سایتادمین سایت
@محمد عبداله زاده,
سلام
تنها شرط برای پایداری نهایی سیستم اینه که ضرایب رو طوری انتخاب کنید که معادله دینامیکی سطح لغزش هرویتز باشد . یعنی مقادیر ویژه اون، سمت چپ محور موهومی باشند.
محمد عبداله زاده
سلام و خسته نباشید اقای دکتر ممنون از اموزش های خوبتون اقای دکتر ببخشید ی سوال داشتم امکانش هست ترمینال اسلایدینگ مد برای سیستم مرتبه 3 بزنیم ؟ اگه امکان انجام باشه سطح لغزش چی تعریف کنیم؟
مدیر سایتادمین سایت
@محمد عبداله زاده,
سلام.پاسخ سوال شما در آموزش مد لغزشی مرتبه بالا هست و اونجا به این قضیه اشاره کردم. لطفا فیلمها رو با دقت بیشتری ببینید
مدیر سایتادمین سایت
@محمد عبداله زاده,
سلام.پاسخ سوال شما در آموزش مد لغزشی مرتبه بالا هست و اونجا به این قضیه اشاره کردم. لطفا فیلمها رو با دقت بیشتری ببینید
محمد
با سلام خدمت شما جناب اقای دکتر ببخشید سوال داشتم اینکه مد لغزشی ترمینال حتما برای سیستم مرتبه 2 ارائه میشه برای سیستم های مرتبه بالاتر نمی تونیم استفاده کنیم واینکه اگه بشه ممنون میشم راهنمایی کنید که چطور سطح لغزش در نظر بگیریم با تشکر
مدیر سایتادمین سایت
سلام
من توی مقالات دیدم. شما هم سرچ کنید پیدا میکنید. عنوان مقالات دقیقا خاطرم نیست
محمدجواد پورمحمدی
با عرض سلام و خسته نباشید. ببخشید اگر در روش مد لغزشی ترمینال تعداد متغیر های حالت از دو تا بیشتر باشد سطح لغزش رو باید چه طور در نظر گرفت؟
مدیر سایتادمین سایت
@محمدجواد پورمحمدی,
سلام برای انواع مرتبه بالا هم توی نت مقالاتی دیدم که البته الان حضور ذهن ندارم اسم اون مقالات چی بود. خودتون با یه سرچ ساده می تونید برای سیستم های با مرتبه بالاتر از دو نوع طراحی ترمینال اسلایدینگ رو پیدا کنید.