 مرجع مهندسی كنترل | دانش با کیفیت در مرز علم
مرجع مهندسی كنترل | دانش با کیفیت در مرز علم
بسیاری از سیستمهای کنترل به صورت غیرخطی مدل میشوند تا با پدیده مدل شده تطابق کافی داشته باشد. به همین جهت سیستمهای کنترل غیرخطی یکی از مهمترین مباحث در مهندسی کنترل بوده و تمام دانشجویان کارشناسی ارشد و دکترای مهندسی برق-کنترل ملزم به گذراندن این درس میباشند. با اینکه مراجع فراوانی برای این درس موجود است، اما در هیچ مرجعی تمرینات حل شده به صورت تفضیلی موجود نیست و حل آنها به عهده خواننده واگذار شده. برای پر کردن این خلا تصمیم گرفتم که حل تشریحی تعدادی از مسایل منتخب در زمینههای گوناگون سیستمهای کنترل غیرخطی را در اختیار شما قرار دهم تا به درک بیشتر شما از کنترل غیرخطی افزوده و بعضی مفاهیم گنگ و ناملموس موجود را با مثالهای مختلف شفاف کنم. تمرینات در پنج بخش جداگانه به شرح زیر تقدیم میشود:
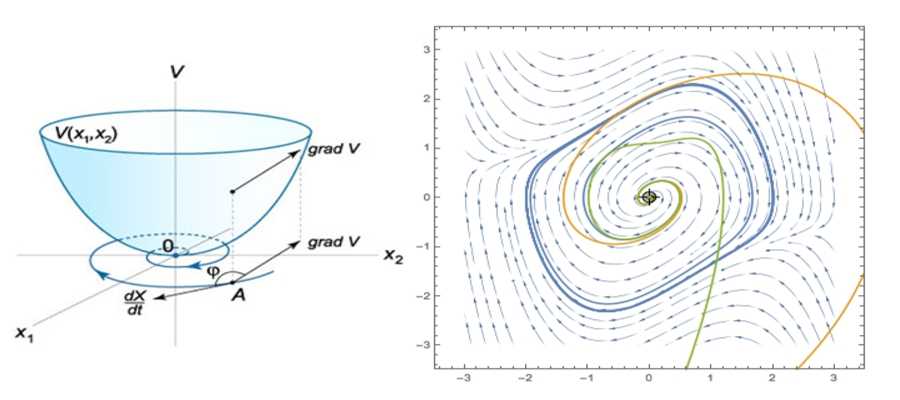
دیاگرام فاز (Phase Portrait)– سیکل حدی (Limit Cycle)
- تابع توصیفی (Describing Function)
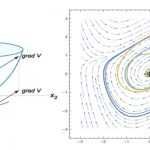
- تحلیل پایداری لیاپونوف (Lyapunov Stability)
- ملاک دایره (Circle Criterion)– ملاک پوپوف (Popov Criterion)– پایدارسازی با تابع لیاپونوف
- خمینه مرکز (Center Manifold)– خطیسازی با فیدبک (Feedback Linearization)– مد لغزشی (Sliding Mode)
علاوه بر حل تمرینات فوق، دو پروژه انجام شده درباره طراحی کنترلکننده های خطیسازی با فیدبک و مدلغزشی (به دو روش مرسوم و انتگرالی) به همراه مستندات نحوه طراحی و کدهای شبیهسازی و فایل سیمولینک نیز ارائه میشود. هر دوی پروژه ها بر روی دینامیک غیرخطی یک شناور مغناطیسی پیادهسازی شدهاند. همچنین صورت سوالات و تمرینات حل شده به صورت رایگان در اختیار شما قرار گرفته است که از لینک بالا قابل دانلود است.
- لینک دانلود فایل بلافاصله بعد از پرداخت وجه به نمایش در خواهد آمد.
- همچنین لینک دانلود به ایمیل شما ارسال خواهد شد به همین دلیل ایمیل خود را به دقت وارد نمایید.
- ممکن است ایمیل ارسالی به پوشه اسپم یا Bulk ایمیل شما ارسال شده باشد.
- در صورتی که به هر دلیلی موفق به دانلود فایل مورد نظر نشدید با ما تماس بگیرید.

جعفر
سلام
یک معادله دیفرانسیل درجه دوم دارم که در رابطه x2دات یک ورودی u هم ضرب شده
میشه لطف کنید ام فایلشو برای من بنویسید
چند روزه دارم کد مینویسم ولی به جوابی نمیرسم
x1dot=x2
x2 dot=4×1^2+x2^2+(3×1^2+x2^2)u
u=-ksign(s)/b
b=0.1:0.1:0.9
علی جوادی
سلام
اول باید مطمئن بشید که کنترل کننده میتونه سیستم رو پایدار کنه بعد شبیهسازی کنید
در ضمن شبیهسازی سیستمهایی که affine باشه با سیستمهای non-affine فرقی نداره
m
سلام ببخشید تو این آموزش ها آموزش کنترل فیبک ورودی خروجی هست؟ با کدنویسیش در متلب. اگه هست اسمش رو بگین
علی جوادی
@m,
سلام
در این مجموعه فقط تمریناتی که میبینید حل شده و کدنویسی در کار نیست. در واقع اصلا فیلم آموزشی نیست و حل تمرینات روی کاغذه.
سوال 9 از تمرینات سری پنجم مربوط به طراحی یک کنترل کننده خطی سازی با فیدبک خروجی برای یک روبات دو درجه آزادی است
حسین
سلام.
اموزش حل تمرین را به صورت فیلم چرا نمیزارین. خیلی بهتره نکاتم در حینش میگین. به نظرم یه همچین چیزی کمه. یادگیری هم سریعتر میشه
ممنون
مدیر سایتادمین سایت
@حسین,
سلام
ممنون از نظرتون. فکر خوبیه. انشاالله در آینده اینکارو هم خواهیم کرد.
سپاسگزارم
حسین
اگه اموزش کنترل غیر خطی را بزارین خیلی خوب میشه .
بعدم اگه امکانش هست اموزش متلب برای رشته کنترل از صفر تا صد بزارین خیلی خوب میشه .
مدیر سایتادمین سایت
@حسین,
سلام
اگه عمری باشه این مجموعه رو میخوام خودم شروع کنم به گفتن. در مورد آموزش متلب هم سعی دارم به صورت تخصصی هر رشته ای آموزش متلب مربوط به خودش رو قرار بدیم
سپاسگزارم
ابراهیم
سلام خوبی دکتر
آموزش های مکانیکتون که تو بالا گفته بودید هنوز آماده نشده؟
مدیر سایتادمین سایت
@ابراهیم,
سلام
میدونم اگه بگم یک ماهه که آمادست باور نمیکنید. ولی فیلم ها روی سایت آپلود شدن منتها منتظرم استاد مربوطه اینکارو انجام بدن
بازم از پیگیری های شما ممنون
امیر
سلام
من گرایشم قدرت هست و درس کنترل غیرخطی رو پاس نکرده ام میخواستم با تحلیل پایداری لیاپانوف بطور کامل آشنا بشم. آیا آموزشی در سایت برای این مورد و همچنین اصول اولیه کنترل غیرخطی (صفحه فازی و …) درنظر گرفته اید؟
باسپاس
مدیر سایتادمین سایت
سلام
درس کنترل غیرخطی رو هنوز شروع به تدریس نکردم ولی میتونید با دیدن فیلم های آموزش مد لغزشی براساس کتاب اسلوتین کنترل کننده طراحی کنید
سپاس
ابراهیم
سلام دکتر
با وجود قول هایی که تو کانال و این جا داده بودید آموزش های رشته مکانیک اصلا خبری نیست
اصلا میادش؟
مدیر سایتادمین سایت
@ابراهیم,
سلام
باور بفرمایید الان یک هفتست که آموزش های مربوط به نرم افزار ترنسیس رو که یکی از دانشجویان دکتری مکانیک ضبط کردن آماده و ویرایش شده. و فقط باید بر روی سایت قرار بدن که کمی سرشون شلوغه و فرصت نکردن. بازم من همین الان پیگیری میکنم
ممنون بابت پیگیری های شما
ابراهیم
سلام دکتر
تو نظر بالا گفتید آموزش های مکانیک اواخر ماه قبل میاد اما هنوز نیومده
روش حساب کنیم؟
مدیر سایتادمین سایت
@ابراهیم,
سلام
بله همه فیلم ها ضبط شده و آمادست.
ظرف یکی دو روز آینده قرار میدیم
تشکر
ابراهیم
سلام دکتر
بهتر نبود انسیس رو به جای ترنسیس تو الویت قرار میدادید؟
انسیس خیلی پرکاربردتر و جامع تره
مدیر سایتادمین سایت
@ابراهیم,
سلام
به امید خدا انسیس هم گفته میشه.
درود
ابراهیم
سلام
اگه آموزشش رو بذارید خیلی بهتره مخصوصا واسه بچه های مکانیک
2 – تو کانال هم گفته بودید آموزش های رشته مکانیک اما هیچ خبری نشد لطفا تا خبری نیست اطلاع رسانی نکنید و گرنه متهم به دروغ گویی میشید و خودتون ضرر می کنید
مدیر سایتادمین سایت
@ابراهیم,
سلام و درود بر مهندس عزیز
ممنون بابت نظرتون
1- تمام سعیم اینه که این مجموعه رو خودم استارت بزنم.
2 – اول اینکه حق با شماست و این هم تجربه ای هستش که خودمون کسب کردیم. اما در مورد بچه های مکانیک یکی از اساتید که دانشجوی دکتری مکانیک هست در حال حاضر هفت جلسه از نرم افزار ترنسیس رو ضبط کرده و تا آخر همین ماه قولشو به ما داده که تمومش کنه.
در مورد اطلاعیه ما توی کانال از همون موقع که اطلاعیش قرار داده شد ایشون استارت کار رو زدن ولی هم ایشون هم همه بچه های تیم به کارشون حساسن و میخوان بهترین کارشون رو ارائه کنن. بنابراین این پروسه کمی زمانبر هستش. با همه این اوصاف بابت تاخیری که بوجود آمد از شما عذرخواهی میکنیم
سپاس