جلسه اول :
در این جلسه تخمینگرهای (رویتگرهای) مختلف از جمله خطی و غیرخطی، گسسته و پیوسته و حالت ترکیبی طبقه بندی شده و از هر نوع چند نمونه معرفی میشود. به علاوه، انواع فیلتر کالمن و توسعه یافته های آن به عنوان یکی از مهمترین و کاربردیترین رویتگرها بیان میشود. در ادامه، زندگینامه کوتاه Rudolf (Rudi) Emil Kalman آورده شده و سوابق تحقیقاتی و جوایز دریافتی وی نیز بیان میشود. همچنین مرجع اصلی این سری فیلمها که کتاب تخمین بهینه حالت نوشته شده توسط Dan Simon است، معرفی شده و یک کتاب دیگر نیز در این زمینه به عنوان نمونه نشان داده میشود. علاوه بر کتاب تخمین بهینه حالت که تئوری آن از کتاب Dan Simon دنبال میشود، بیشتر شبیهسازیها و کدنویسیها برای پیادهسازی فیلترهای مختلف از طریق تولباکس ekf/ukf تهیه شده توسط Simo Sarkka، انجام میشود که در این جلسه معرفی میشود. جهت ارزیابی شما عزیزان جلسه اول رایگان تقدیم میشود.
مدت زمان آموزش: 78 دقیقه
حجم فایل: 239 مگابایت
محتویات درس: فیلم با کیفیت 720p - پاورپوینت درس – کتاب "تخمین بهینه حالت" اثر Dan Simon - کتاب "تخمین بهینه با کاربردهای آن برای ردیابی و ناوبری" اثر Yaakov Bar-Shalom – تولباکس "ekf/ukf" تهیه شده توسط Simo Sarkka
جلسه اول:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه  در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه دوم :
این جلسه شامل مباحث مقدماتی جبر خطی و جبر ماتریسی مطابق زیربخش اول فصل اول کتاب بوده و دستورات متلب متناسب با هر مفهوم با مثال تشریح میشود. همچنین لم معکوس ماتریس که در آینده به وفور از آن استفاده میشود نیز معرفی می شود.
مدت زمان آموزش: 68 دقیقه
حجم فایل: 100 مگابایت
محتویات درس: فیلم با کیفیت 720p - پاورپوینت درس
پیش نمایش جلسه دوم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه سوم :
در این جلسه ادامه مباحث جبر ماتریسی بیان شده و سپس سیستمهای خطی و غیرخطی دینامیکی بحث شده است. از جمله مفهوم ماتریس گذر حالت (State Transition Matrix) و روشهای یافتن آن به صورت تئوری و در محیط متلب تشریح شده است. در ادامه سیستمهای غیرخطی متغیر با زمان (non-autonomous) و نامتغیر با زمان (autonomous) مورد بحث قرار گرفته و لزوم و نحوه خطی سازی ژاکوبی سیستمهای خطی بیان شده و بر روی مدل غیرخطی یک موتور سنکرون دو فازه اعمال شده است.
مدت زمان آموزش: 70 دقیقه
حجم فایل: 108 مگابایت
محتویات درس: فیلم با کیفیت 720p - پاورپوینت درس
پیش نمایش جلسه سوم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه چهارم :
در این جلسه ابتدا نحوه گسسته سازی سیستمهای خطی پیوسته مورد بحث قرار می گیرد. سپس نحوه شبیه سازی سیستمهای پیوسته بیان شده و سه روش مرسوم مستطیلی (Rectangular), ذوزنقه ای (Trapezoidal) و رانگ-کوتای مرتبه 4 (Fourth-order Runge-Kutta) تشریح می شود. در انتها یک سیستم متغیر با زمان در محیط متلب شبیه سازی شده و نتایج سه روش مذکور باهم مقایسه می شوند.
مدت زمان آموزش: 61 دقیقه
حجم فایل: 95 مگابایت
محتویات درس: فیلم با کیفیت 720p - پاورپوینت درس – کد متلب
پیش نمایش جلسه چهارم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه پنجم:
در این جلسه ابتدا مفاهیم مربوط به پایداری از جمله پایداری لیاپونوف (Lyapunov Stability) و پایداری مرزی (Marginal Stability) تعریف شده و روش بررسی آن روی سیستمهای پیوسته و گسسته بیان می شود. سپس مفاهیم کنترل پذیری (Controllability) و رویت پذیری (Observability) تعریف شده و سه روش پرکاربرد برای تست کردن کنترل پذیری و رویت پذیری هم برای سیستمهای پیوسته و هم برای سیستمهای گسسته ارائه می شود. روش اول از طریق ماتریس کنترل پذیری (رویت پذیری), روش دوم از طریق گرامیان کنترل پذیری (رویت پذیری) و روش سوم از معادله سیلوستر (استین) برای این کار استفاده میکند. دستورات متلب برای تست کردن کنترل پذیری و رویت پذیری نیز با مثال بیان می شوند. در انتها مفاهیم پایداری پذیری (Stabilizability) و آشکاری پذیری (Detectability) نیز تعریف شده و نحوه تست کردن آنها از طریق فرم جردن برای یک مثال تشریح می شود.
مدت زمان آموزش: 64 دقیقه
حجم فایل: 134 مگابایت
محتویات درس: فیلم با کیفیت 720p - پاورپوینت درس
پیش نمایش جلسه پنجم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه ششم:
این جلسه فصل دوم کتاب تخمین بهینه حالت Dan Simon را آغاز کرده و مقدمات مورد نیاز برای فصل های بعد در زمینه احتمالات بیان می شود. ابتدا مفاهیم احتمال شرطی (Conditional Probability)، قانون بیز (Bay’s Rule) و پیشامدهای مستقل (Independent Events) تشریح می شود. در ادامه متغیرهای تصادفی (Random Variables) وانواع آن، تابع توزیع احتمال PDF (Probability Distribution Function)، تابع چگالی احتمال pdf (Probability Density Function)، تابع Q و معادله چپمن-کولموگروف (Chapman-Kolmogorov) معرفی می شوند. در انتها امید ریاضی (Expected Value)، واریانس (Variance) و انحراف معیار (Standard Deviation) معرفی شده و مثال های مختلف برای آنها ارائه می شود. همچنین دستورات متلب لازم برای بدست آوردن امید ریاضی، میانگین و واریانس با مثال تشریح می شوند.
مدت زمان آموزش: 66 دقیقه
حجم فایل: 81 مگابایت
محتویات درس: فیلم با کیفیت 720p - پاورپوینت درس
پیش نمایش جلسه ششم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه هفتم :
در این جلسه ابتدا مفهوم گشتاورها (Moments) و از جمله چولگی (Skewness) بیان شده و سپس متغیرهای تصادفی با توزیع یکنواخت (Uniform) و نرمال (Normal) یا گوسی (Gaussian) معرفی می شوند. دستورات متلب لازم برای تولید یک متغیر تصادفی با توزیع های یکنواخت و گوسی نیز بیان شده و برای هر کدام یک مثال آورده می شود. همچنین نحوه بدست آوردن pdf یک متغیر تصادفی تبدیل یافته با چند مثال توضیح داده می شود. در ادامه مفاهیم متغیرهای تصادفی چند گانه (Multiple Random Variables)، استقلال آماری (Statistical Independence)، کواریانس (Covariance)، همبستگی (Correlation) و رابطه بین استقلال و همبستگی با مثالهای مختلف بیان می شوند. در انتها آمار چند متغیره که مربوط به برداری از متغیرهای تصادفی اسکالر است، مورد بحث قرار می گیرد.
مدت زمان آموزش: 79 دقیقه
حجم فایل: 103 مگابایت
محتویات درس: فیلم با کیفیت 720p - پاورپوینت درس و کد متلب
پیش نمایش جلسه هفتم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه هشتم :
در این جلسه ابتدا مفهوم فرایند تصادفی (Stochastic Process) و انواع آن معرفی شده، تابع توزیع و چگالی احتمال برای آن تعریف شده و میانگین، کواریانس و همبستگی مربوط به فرایندهای تصادفی معرفی می شوند. سپس مفاهیم فرایندهای ایستای اکید (Strict-Sense Stationary)، فرایند ایستای وسیع (Wide-Sense Stationary) و فرایندهای تصادفی ارگادیک (Ergodic Process) با ذکر چند مثال تشریح می شوند. در ادامه نویز سفید (White Noise) پیوسته و گسسته به همراه چگالی طیف توان Power Spectral Density) PSD) تعریف شده و سپس نحوه شبیه سازی و تولید نویز همبسته بیان می شود. در انتها دستورات متلب مربوط به تولید نویز همبسته با ماتریس کواریانس دلخواه در متلب به همراه مثال به طور کامل تشریح می شود.
مدت زمان آموزش: 68 دقیقه
حجم فایل: 95 مگابایت
محتویات درس: فیلم با کیفیت 720p - پاورپوینت درس و کد متلب
پیش نمایش جلسه هشتم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه نهم :
در این جلسه فصل سوم کتاب تخمین بهینه حالت Dan Simon، با معرفی روش حداقل مربعات Least Squares) LS) که بر اساس نظریه بهینگی گوس است، آغاز می شود. به طور خاص نحوه تخمین بهینه یک مقدار ثابت (اسکالر یا بردار) از یک سری اندازه گیریهای نویزی تشریح می شود. سپس روش حداقل مربعات وزندار Weighted Least Square) WLS) معرفی شده و مثالی از نحوه اعمال آن برای تخمین مقاومت الکتریکی از اندازه گیری های نویزی بیان می شود. در ادامه معایب روش حداقل مربعات بیان شده و برای حل این مشکلات روش حداقل مربعات بازگشتی Recursive Least Square) RLS) معرفی می شود.
مدت زمان آموزش: 60 دقیقه
حجم فایل: 79 مگابایت
محتویات درس: فیلم با کیفیت 720p و پاورپوینت درس
پیش نمایش جلسه نهم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه دهم :
در این جلسه ابتدا شکلهای دیگر تخمینگر RLS معرفی شده و مزایا و معایب هر کدام نسبت به هم بیان می شود و طی چند مثال این ویژگیهای هر فرمولبندی تشریح می شود. در ادامه بحث برازش منحنی (Curve Fitting) با استفاده از RLS مطرح شده و نحوه فرمولبندی صورت مساله برای برازش خط (Linear Fitting)، برازش سهمی (Quadratic Fitting)، برازش منحنی درجه سه (Cubic Fitting) و درجه چهار (Quartic Fitting) توسط RLS بیان می شود. در انتها تمرین کامپیوتری شماره 3-13 کتاب که مربوط به برازش منحنیهای درجه یک تا درجه 4 بر روی میزان تولید فولاد در ایالات متحده آمریکاست، حل شده و کدهای متلب مربوطه نیز به صورت کامل تشریح می شود. علاوه بر محاسبه خطای جذر میانگین مربعات (Root Mean Square Error) برای هر روش و مقایسه آنها، مقدار تولید فولاد برای سال بعد پیش بینی شده و برای منحنی های مختلف مقایسه می شود.
مدت زمان آموزش: 85 دقیقه
حجم فایل: 140 مگابایت
محتویات درس: فیلم با کیفیت 720p - پاورپوینت درس – کدهای متلب
پیش نمایش جلسه دهم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه یازدهم :
در این جلسه ابتدا فیلتر وینر به عنوان یک روش پاسخ فرکانسی برای تضعیف نویز در سیگنالها که توسط نوربرت وینر (Norbert Wiener) در سال 1942 معرفی شده، تشریح شده و صورت مساله به شکل ریاضی مطرح می شود. سپس سه روش موجود برای طراحی فیلتر وینر شامل بهینه سازی فیلتر پارامتری (Parametric Filter Optimization) ، بهینه سازی فیلتر غیر علی (Noncausal Filter Optimization) و بهینه سازی فیلتر علی (Causal Filter Optimization) ارائه شده و یک مثال مشترک با استفاده از این سه روش حل شده و سه فیلتر وینر برای آن طراحی می شود. در انتها تمرین کامپیوتری 3-14 کتاب که مربوط به تولید سیگنال نویزی، شبیه سازی و استخراج خطای جذر میانگین مربعات (Root-Mean-Square-Error) برای همه روشها و مقایسه نتایج می باشد، به صورت کامل در متلب کدنویسی شده و خطاهای RMS برای سه روش باهم مقایسه شدهاند.
مدت زمان آموزش: 86 دقیقه
حجم فایل: 79 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس و کدهای متلب
پیش نمایش جلسه یازدهم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه دوازدهم :
در این جلسه فصل چهارم کتاب را که در مورد انتشار میانگین و ماتریس کواریانس در سیستمهای مختلف است، آغاز میکنیم. در ابتدا سیستمهای گسسته خطی را در نظر گرفته و معادلات تفاضلی حاکم بر میانگین و ماتریس کواریانس خطا محاسبه شده و یک مثال از سیستم جمعیت شکار و شکارچی (Prey and Predator) برای این حالت حل شده و نتایج تحلیل میشوند. در ادامه سیستمهای نمونه-داده (Sample-Data Systems) که در عمل بسیار با آنها مواجهیم (دینامیک پیوسته و اندازهگیری گسسته)، مورد بحث قرار گرفته و معادلات حاکم بر میانگین و ماتریس کواریانس برای این نوع سیستمها استخراج میشود. برای این حالت یک مثال اسکالر حل شده و نتایج تحلیلی کتاب با نتایج شبیهسازی شده در متلب (حل تمرین کامپیوتری 4-11) مقایسه میشوند. در تمام حالتهای بیان شده، دستورات متلب مرتبط با مثال تشریح میشوند.
مدت زمان آموزش: 61 دقیقه
حجم فایل: 86 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس و کدهای متلب
پیش نمایش جلسه دوازدهم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه سیزدهم :
در این جلسه معادلات دیفرانسیل حاکم بر انتشار میانگین و ماتریس کواریانس در عبور از یک سیستم پیوسته خطی استخراج شده و معادلات مربوط به حالت ماندگار ماتریس کواریانس ارائه میشود. برای بدست آوردن ماتریس کواریانس در حالت ماندگار معادله لیاپونوف پیوسته یا معادله سیلوستر (Sylvester Equation) باید حل شود که دستور متلب مورد نیاز برای حل این معادله با مثال تشریح میشود. در انتها تمرینات کامپیوتری 4-12 و 4-13 به صورت کامل تحلیل شده و در محیط متلب شبیهسازی میشود و نشان داده میشود که ماتریسهای کواریانس محاسبه شده از دو روش تحلیلی و شبیهسازی به یک جواب میرسد.
مدت زمان آموزش: 74 دقیقه
حجم فایل: 109 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس و کدهای متلب
پیش نمایش جلسه سیزدهم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه چهاردهم :
در این جلسه مباحث فصل پنجم کتاب Dan Simon را که مربوط به فیلتر کالمن گسسته خطی است، آغاز میکنیم. با استفاده از معادلات انتشار میانگین و کواریانس در فصل 4 و همچنین الگوریتم حداقل مربعات بازگشتی RLS در فصل 3، معادلات مربوط به فیلتر کالمن گسسته استخراج شده و مفاهیم Smoothing، Prediction و تخمین پیشین و استقرایی به صورت تفصیلی معرفی میشوند. در ادامه، فرمهای مختلف فیلتر کالمن گسسته بیان شده و مزایا و معایب هر کدام تشریح میشود. همچنین برخی ویژگیهای فیلتر کالمن از جمله بهینه بودن برای حالتهای مختلف نویز فرآیند و اندازهگیری مورد بحث قرار میگیرد. در انتها مفهوم نوآوری (Innovation) معرفی شده و ویژگیهای آن بیان میشود.
مدت زمان آموزش: 60 دقیقه
حجم فایل: 82 مگابایت
محتویات درس: فیلم با کیفیت 720p و پاورپوینت درس
پیش نمایش جلسه چهاردهم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه پانزدهم :
در ابتدای این جلسه معادلات تک مرحلهای فیلتر کالمن گسسته برای هر دوحالت پیشین و استقرایی استخراج میشود. سپس فیلتر کالمن گسسته برای مثال 5-1 کتاب که مربوط به یک سیستم نیوتونی بدون نویز فرآیند (ولی ناپایدار) است، پیاده سازی شده و علاوه بر تحلیل عملکرد فیلتر کالمن کدهای متلب آن اجرا شده و نتایج شبیهسازی نیز نشان داده میشوند. در انتها یک فرم دیگر برای ماتریس کواریانس خطا معرفی شده و کاربرد آن برای محاسبه ماتریس کواریانس خطا و بهره فیلتر کالمن در حالت ماندگار تشریح میشود.
مدت زمان آموزش: 74 دقیقه
حجم فایل: 82 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس و کد متلب
پیش نمایش جلسه پانزدهم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه شانزدهم :
در این جلسه ابتدا فرم بسته معادلات فیلتر کالمن را برای سیستمهای اسکالر استخراج کرده و واریانس خطا از روی این فرم بسته در حالت ماندگار محاسبه میشود. همچنین طی یک مثال اسکالر مقادیر حالت ماندگار بهره و واریانس از شبیهسازی بدست آمده و با مقادیر تحلیلی تطبیق میشوند. در ادامه، عوامل اثرگذار بر روی عملکرد فیلتر کالمن و واگرایی آن بحث شده و راهکارهای پیشنهاد شده برای حل این مشکلات بیان میشوند. یکی از این راهکارها، افزودن نویز فرایند ساختگی به مدل سیستم است که باعث میشود اثر خطای مدلسازی در طراحی کم شود. در مثال دوم برای یک سیستم با مدل غیر دقیق از این ترفند استفاده کرده و یک فیلتر کالمن مقاوم در برابر خطای مدلسازی طراحی شده و با شبیهسازی داخل متلب عملکرد آن مورد بررسی قرار میگیرد. در انتها اثر افزودن نویز فرایند ساختگی بر روی تخمین حالت به صورت تحلیلی بررسی شده و نتیجهگیری میشود.
مدت زمان آموزش: 65 دقیقه
حجم فایل: 97 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس و کد متلب
پیش نمایش جلسه شانزدهم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه هفدهم :
در این جلسه تولباکس رایگان ekf/ukf که تحت راهنمایی دکتر Simo Sarkka تهیه شده است، معرفی میشود. این تولباکس شامل توابع مورد نیاز برای طراحی و شبیهسازی اکثر فیلترهای موجود از جمله فیلتر کالمن خطی و Smoother آن، فیلتر EKF و Smoother آن، UKF و Smoother آن، GHKF و Smoother آن و همچنین CKF و Smoother آن میشود. اکثر مطالب از تز دکتری Simo Sarkka گرفته شده است و به صورت کاملا رایگان در سایت ایشان قابل دسترسی است. در اینجا ما با آخرین ورژن ارائه شده ukf/ekf_1-3 کار میکنیم که در سال 2011 نوشته شده است. ابتدا نحوه دانلود و نصب این تولباکس بر روی نرمافزار متلب بیان شده و سپس از روی راهنمای تولباکس محتویات آن بررسی میشود. برای شروع دستورات (توابع) مربوط به فیلتر کالمن خطی گسسته تشریح شده و ورودیها و خروجیهای آن بررسی میشوند. همچنین معادلات بروزرسانی فیلتر کالمن که در این تولباکس استفاده شده با معادلات موجود در کتاب Dan Simon تطبیق داده شده و اختلافات بیان میشود. با توجه به open source بودن این تولباکس، تمام توابع را میتوان در صورت نیاز به شکل مورد نظر تغییر داد به عنوان مثال برای محاسبه مارتریس کواریانس خطا از فرم جوزف استفاده کرد.
مدت زمان آموزش: 64 دقیقه
حجم فایل: 143 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس، تولباکس ekf/ukf و راهنمای استفاده از تولباکس
پیش نمایش جلسه هفدهم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه هجدهم :
در این جلسه تمرین کامپیوتری 5-11 فصل پنجم کتاب تخمین بهینه حالت با استفاده از تولباکس ekf/ukf که جلسه پیش معرفی شد، حل خواهد شد. در ابتدا مدل دینامیکی سیستم برای مساله استخراج شده و سپس خود سیستم و فیلتر کالمن طراحی شده در محیط متلب شبیهسازی شده و نتایج تحلیل میشوند. دیده میشود که نتایج بدست آمده از روشهای تحلیلی با نتایج شبیهسازی تطابق قابل قبولی دارند.
با توجه به اینکه برای پیادهسازی فیلتر کالمن از تولباکس ekf/ukf استفاده شده است، بنابراین قبل از اجرای کدهای مربوط به این جلسه لازم است که این تولباکس بر روی نرم افزار متلب نصب شده باشد. توضیحات تکمیلی در مورد نحوه دانلود و نصب این تولباکس در جلسه هفدهم ارائه شده است.
مدت زمان آموزش: پنجاه و چهار دقیقه
حجم فایل: 96 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس و کد متلب
پیش نمایش جلسه هجدهم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه نوزدهم :
در این جلسه ابتدا پایداری و همگرایی روشهای مختلف گسستهسازی بحث شده و با شبیهسازی روی یک مدل یک چهارم سیستم تعلیق مطالب بیان شده اعتبار سنجی میشوند. در ادامه تابع corr_rnd که برای شبیهسازی نویزهای همبسته مورد استفاده قرار میگیرد، معرفی شده و نحوه اضافه کردن آن به تولباکس ekf/ukf تشریح میشود. سپس دینامیک پیوسته مساله 5-12 با استفاده از تولباکس گسسته شده و یک فیلتر کالمن گسسته برای آن طراحی میشود. در نهایت خود سیستم و فیلتر کالمن طراحی شده در محیط متلب شبیهسازی شده و نتایج بدست آمده از شبیهسازی با نتایج محاسبه شده تحلیلی مقایسه میشوند.
با توجه به اینکه برای پیادهسازی فیلتر کالمن از تولباکس ekf/ukf استفاده شده است، بنابراین قبل از اجرای کدهای مربوط به این جلسه لازم است که این تولباکس بر روی نرم افزار متلب نصب شده باشد. توضیحات تکمیلی در مورد نحوه دانلود و نصب این تولباکس در جلسه هفدهم ارائه شده است.
مدت زمان آموزش: یک ساعت و پانزده دقیقه
حجم فایل: 123 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس و کد متلب
پیش نمایش جلسه نوزدهم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه بیستم:
در این جلسه فیلتر کالمن گسسته خطی برای دینامیک سیستم تعلیق طراحی و در محیط متلب شبیهسازی میشود. این کار در دو مرحله انجام میشود. در وهله اول سیستم تعلیق غیرفعال فرض شده و تنها اغتشاشات محیطی (نویز فرایند) در نظر گرفته شده و با استفاده از تولباکس ekf/ukf فیلتر کالمن پیادهسازی میشود. در مرحله بعدی از یک کنترل کننده طراحی شده برای سیستم تعلیق (در سری فیلمهای کنترل مقاوم ∞H فیدبک خروجی سیستمهای خطی تحت اغتشاش با استفاده از نامساویهای ماتریسی خطی LMI) استفاده کرده و دوباره با تولباکس ekf/ukf فیلتر کالمن روی سیستم تعلیق پیادهسازی و شبیهسازی میشود. همچنین اثر تغییر زمان نمونهبرداری (Sample Time) ، تعداد خروجیها، شرایط اولیه تخمین حالت و شرایط اولیه ماتریس کواریانس خطا به تفصیل و با شبیهسازی تشریح میشود.
با توجه به اینکه برای پیادهسازی فیلتر کالمن از تولباکس ekf/ukf استفاده شده است، بنابراین قبل از اجرای کدهای مربوط به این جلسه لازم است که این تولباکس بر روی نرم افزار متلب نصب شده باشد. توضیحات تکمیلی در مورد نحوه دانلود و نصب این تولباکس در جلسه هفدهم ارائه شده است.
مدت زمان آموزش: یک ساعت و بیست و هشت دقیقه
حجم فایل: 167 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس، کد متلب و مقالات
پیش نمایش جلسه بیستم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
طراحی با استفاده از واسط گرافیکی(GUI)
در تکمیل فصل پنجم، دو نرم افزار در متلب تهیه شده که با استفاده از ورودی هایی که به آن داده می شود، فیلتر کالمن را به صورت گرافیکی طراحی می کند.
ضمناً جهت يادگيري نحوه ايجاد gui (واسط گرافيکي در متلب) هم مي توانيد به آموزش واسط های گرافیکی در متلب و یا در اينجا کليک کنيد.
1- طراحي فيلتر کالمن گسسته با استفاده از GUI
در اين واسط گرافيکي مي توانيد براي يک سيستم گسسته از هر مرتبه اي، يک فيلتر کالمن گسسته طراحي کنيد و پاسخ واقعي، تخمين، بهره فيلتر کالمن و همچنين خطاي تخمين را مشاهده کنيد. همينطور ماتريس کواريانس خطاي حالت دائمي تخمين با استفاده از دو روش گريوال و ريکاتي و نيز خطاي RMS بين مقدار واقعي و تخمين هم نمايش داده شده است.
پیش نمایش
2- طراحي فيلتر کالمن گسسته برای یک سیستم پيوسته با استفاده از GUI
در اين واسط گرافيکي مي توانيد براي يک سيستم پيوسته از هر مرتبه اي، يک فيلتر کالمن گسسته طراحي کنيد و پاسخ واقعي، تخمين، بهره فيلتر کالمن و همچنين کواريانس خطاي تخمين را مشاهده کنيد. همينطور ماتريس کواريانس خطاي حالت دائمي تخمين با استفاده از دو روش گريوال و ريکاتي و نيز خطاي RMS بين مقدار واقعي و تخمين هم نمايش داده شده است.
پیش نمایش
جلسه بیست و یکم :
در این جلسه فصل ششم کتاب را با معرفی فیلتر کالمن متوالی (Sequential Kalman Filter) آغاز کرده و الگوریتم آن مرحله به مرحله شرح داده میشود. این روش میتواند بدون محاسبه معکوس ماتریس پیادهسازی شود اما سیستم باید شرایط خاصی را ارضا کند. این فیلتر به صورت اولیه برای سیستمهایی با ماتریس کواریانس قطری برای نویز اندازهگیری طراحی شده است اما در ادامه نحوه اعمال آن برای ماتریسهای کواریانس غیر قطری نیز تشریح میشود. با توجه به اینکه برای فیلتر کالمن متوالی دستور مرتبط در تولباکس ekf/ukf وجود ندارد، یک تابع برای این روش نوشته شده (sequential_KF) و در انتهای جلسه نحوه اضافه کردن آن به تولباکس و ترتیب ورودیها و خروجیها تشریح میشوند. علاوه بر مرور مثال حل شده در کتاب، مساله کامپیوتری 6-14 کتاب با استفاده از تابع معرفی شده حل میشود. لازم به ذکر است که با توجه به غیر قطری بودن ماتریس کواریانس نویز فرایند باید از روش معرفی شده در بخش 2-8 کتاب استفاده شود که برای این کار از دستور corr_rnd (که در جلسه نوزدهم معرفی شد) استفاده شده است.
مدت زمان آموزش: یک ساعت و دوازده دقیقه
حجم فایل: 111 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس و کد متلب
پیش نمایش جلسه بیست و یکم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه بیست و دوم :
در این جلسه بخش 6-2 کتاب که مربوط به فیلتر اطلاعات (Information Filter) است، مورد بحث قرار میگیرد. ابتدا ماتریس اطلاعات معرفی شده و ارتباط آن با ماتریس کواریانس تشریح میشود. سپس نحوه اصلاح معادلات فیلتر کالمن و الگوریتم فیلتر اطلاعات استخراج میشود. با توجه به اینکه هیچ دستوری برای پیادهسازی فیلتر اطلاعات در تولباکس ekf/ukf معرفی نشده، یک تابع جدید (information_KF) برای پیادهسازی و شبیهسازی این فیلتر در محیط متلب معرفی شده و ورودیها و خروجیهای آن به صورت کامل تشریح میشوند. در انتها از این تابع استفاده کرده و مساله تخمین مسیر دو بعدی یک سیستم 2D-CWPA را که در راهنمای تولباکس ekf/ukf یک فیلتر کالمن استاندارد برای آن طراحی شده است، حل میشود. نتایج شبیهسازی (مسیر واقعی شیئ متحرک، مسیر اندازهگیری شده و مسیر تخیمن زده شده) نشان میدهد که فیلتر اطلاعات با موفقیت نویز موجود در خود سیستم و سنسورهای اندازهگیری را تا حد قابل قبولی بر روی حالتهای تخمین زده شده کاهش میدهد.
با توجه به اینکه ماتریس کواریانس نویز فرایند برای سیستم گسسته شده 2D-CWPA، غیر قطری است، برای شبیهسازی سیستم باید از تابع corr_rnd استفاده شود که در جلسه نوزدهم معرفی شد.
مدت زمان آموزش: یک ساعت و هشت دقیقه
حجم فایل: 125 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس، کد متلب و راهنمای تولباکس
پیش نمایش جلسه بیست و دوم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه بیست و سوم :
در این جلسه فیلتر کالمن ریشه دوم (Square Root Filtering) معرفی میشود. فیلترینگ ریشه دوم روشی برای دو برابر کردن دقت محاسباتی بدون تغییر دقت سخت افزاری است اگرچه بار محاسباتی را افزایش میدهد. ابتدای جلسه عدد حالت (Condition number) و دستور متلب آن معرفی شده و کاربرد آن در بهبود دقت محاسبات ماتریس کواریانس خطا بیان میشود. در ادامه نحوه بروزرسانی زمانی (انتشار میانگین و کواریانس) با استفاده از ریشه دوم ماتریس کواریانس ارايه شده و طی یک مثال بهبود حل عددی نشان داده میشود. در نهایت نحوه بروزرسانی اندازهگیری ریشه دوم پاتر (Potter) معرفی شده و الگوریتم آن با یک مثال تبیین میشود.
مدت زمان آموزش: یک ساعت و شش دقیقه
حجم فایل: 84 مگابایت
محتویات درس: فیلم با کیفیت 720p و پاورپوینت درس
پیش نمایش جلسه بیست و سوم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه بیست و چهارم :
در ادامه مباحث فیلتر کالمن ریشه دوم (Square Root Filtering)، یک روش دیگر بنام مثلثی سازی (Triangularization) برای پیادهسازی معادلات بروزرسانی اندازهگیری معرفی میشود که میتواند دقت محاسبات را دو برابر کند. در ادامه روشهای مختلف حل معادله ماتریسی بدست آمده در جلسه قبل جهت پیادهسازی بروزرسانی زمانی فیلتر کالمن، بیان شده و از بین آنها الگوریتم روشهای هاوس هولدر (Householder) و گرام اشمیت توسعه یافته (Modified Gram-Schmidt) بیان میشود. در بین الگوریتمهای مختلف گرام اشمیت توسعه یافته و سپس هاوس هولدر دارای بهترین نتایج عددی هستند.
مدت زمان آموزش: پنجاه و چهار دقیقه
حجم فایل: 73 مگابایت
محتویات درس: فیلم با کیفیت 720p و پاورپوینت درس
پیش نمایش جلسه بیست و چهارم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه بیست و پنجم :
در این جلسه تمرین کامپیوتری 6-15 کتاب به طور کامل حل میشود. ابتدا توابع مورد نیاز برای الگوریتمهای هاوس هولدر (householder) و گرام اشمیت توسعه یافته (mgramschmidt) معرفی میشوند. سپس تابع مورد نیاز برای پیادهسازی روش پاتر (potter) معرفی میشود. در ادامه دستور SQKF معرفی میشود که مقادیر کواریانس و تخمین را از مرحله قبل به بعد با استفاده از توابع فوق محاسبه میکند. در این تابع کاربر میتواند برای بروزرسانی زمانی از هر کدام از روشهای هاوس هولدر و یا گرام اشمیت توسعه یافته استفاده کند. درنهایت با استفاده از تابع SQKF تمرین کامپیوتری 6-15 کتاب حل شده و نتایج شبیهسازی تحلیل میشوند.
همچنین نحوه افزودن تمام این توابع به تولباکس ekf/ukf گام به گام تشریح شده است. لازم به ذکر است که علاوه بر دستورات فوق برای شبیهسازی سیستم از دستور corr_rnd نیز استفاده شده که در جلسه هجدهم معرفی شد. بنابراین این تابع نیز باید به تولباکس اضافه شده باشد. بدیهی است که خود تولباکس ekf/ukf نیز برای اجرای برنامه ها ضروری بوده و باید بر روی متلب اضافه شده باشند.
مدت زمان آموزش: یک ساعت و دوازده دقیقه
حجم فایل: 128 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس و کدهای متلب
پیش نمایش جلسه بیست و پنجم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه بیست و ششم :
در این جلسه ابتدا تجزیه U-D یک ماتریس مثبت معین معرفی شده و دستور (تابع) مورد نیاز برای پیدا کردن آن (UD) ارائه میشود. تابع ارائه شده از تجزیه چولسکی استفاده میکند که دارای دستور متلب آماده میباشد. سپس نحوه بروزرسانی زمانی و اندازهگیری ماتریس کواریانس با استفاده از تجزیه U-D آن بیان میشود. با توجه به پایین مثلثی بودن ماتریس U به دست آمده از دستور UD، مراحل بروزرسانی به گونهای اصلاح میشوند تا برای ماتریسهای پایین مثلثی برقرار باشند.
مدت زمان آموزش: یک ساعت و چهار دقیقه
حجم فایل: 88 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس و کد متلب
پیش نمایش جلسه بیست و ششم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه بیست و هفتم :
در این جلسه ابتدا الگوریتم کامل فیلتر کالمن با استفاده از تجزیه U-D بیان شده و سپس دستور (یا تابع) UDKF برای پیادهسازی آن در متلب معرفی میشود. لازم به ذکر است که داخل دستور UDKF از دستور UD استفاده شده است و بنابراین باید هر دوی این توابع به شکلی که در فیلم آموزش داده شده است، به مسیر پیش فرض متلب اضافه شود. در ادامه فیلتر U-D بر روی مدل نرخ زاویه پیچ در تمرین کامپیوتری 6-15 پیاده شده و نحوه استفاده از تابع UDKF مفصلا بحث میشود. همچنین با استفاده از این دستور فیلتر U-D برای سیستم دو بعدی CWPA که در تولباکس ekf/ukf فیلتر کالمن استاندارد بر روی آن پیاده شده است، طراحی میگردد. نتایج هر دو شبیهسازی نشان میدهد که دستور UDKF با موفقیت حالتهای سیستم را تخمین زده و اثر نویز را مینیمم میکند.
مدت زمان آموزش: پنجاه دقیقه
حجم فایل: 100 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس، راهنمای تولباکس ekf/ukf و کدهای متلب
پیش نمایش جلسه بیست و هفتم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه بیست و هشتم :
در این جلسه فصل هفتم کتاب را شروع کرده و معادلات فیلتر کالمن برای سیستمهایی که دارای نویز فرایند و اندازهگیری همبسته هستند، استخراج میشود. بعد از معرفی الگوریتم فیلتر کالمن تعمیم یافته، مثال 7-1 را از طریق کد متلب ارائه شده توسط Dan Simon حل کرده و نتایج تحلیل میشوند. در ادامه یک تابع کلیتر و جامعتر بنام CRKF معرفی میشود که میتواند برای سیستمهای چند ورودی و چند خروجی و همچنین دارای ورودی کنترلی استفاده شود. داخل این تابع از تابع corr_rnd (که در جلسه 18 معرفی شد) استفاده شده است، بنابراین علاوه بر خود تابع CRKF باید تابع corr_rnd نیز به مسیر پیش فرض متلب به روش گفته شده در فیلم اضافه شود. در نهایت همان مثال 7-1 با دستور CRKF نیز شبیهسازی شده و نتایج تحلیل میشوند.
مدت زمان آموزش: یک ساعت و ده دقیقه
حجم فایل: 120 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس و کدهای متلب
پیش نمایش جلسه بیست و هشتم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه بیست و نهم :
در این جلسه روشهای مختلف حل مساله فیلتر کالمن برای سیستمهای دارای نویز فرایند و اندازهگیری رنگی مورد بررسی قرار میگیرند. در ابتدا معادلات فیلتر کالمن برای نویز فرایند رنگی (با فرض نویز اندازهگیری سفید) ارائه میشود. در ادامه دو روش برای فرمولبندی فیلتر کالمن برای سیستمهای دارای نویز اندازهگیری رنگی (با فرض نویز فرایند سفید) معرفی شده و معایب و مزایای آنها بحث میشود. در انتها مثال 7-2 کتاب با استفاده از کد آماده متلب موجود در سایت Dan Simon حل شده و نتایج به صورت کامل تحلیل میشوند.
مدت زمان آموزش: یک ساعت و دوازده دقیقه
حجم فایل: 109 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس و کد متلب
پیش نمایش جلسه بیست و نهم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه سی ام :
در این جلسه تمرین 7-1 و تمرین کامپیوتری 7-10 کتاب حل میشود. تمرین 7-1 پیش نیاز تمرین کامپیوتری 7-10 بوده و مقادیر تحلیلی بدست آمده برای کواریانسهای خطای تخمین در تمرین 7-1 با نتایج بدست آمده از شبیهسازی در تمرین 7-10 مقایسه میشوند. نتایج بدست آمده از شبیهسازی فیلترهای کالمن استاندارد و تعمیم یافته در متلب نشاندهنده تطبیق مقادیر تحلیلی و شبیهسازی است.
مدت زمان آموزش: یک ساعت و هشت دقیقه
حجم فایل: 116 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس و کد متلب
پیش نمایش جلسه سی ام:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه سی و یکم :
در این جلسه فیلتر کالمن در حالت ماندگار معرفی شده و نحوه محاسبه ماتریس کواریانس و بهره فیلتر کالمن در حالت ماندگار از طریق معادله ریکاتی بحث میشود. ابتدا مفهوم کنترلپذیری روی دایره تعریف میشود. در ادامه با استفاده از تعریف کنترلپذیری روی دایره واحد، قضایای متعدد وجود پاسخ های پایدار برای شرایط مختلف سیستم مورد بررسی قرار میگیرند. در انتها با چند مثال ارتباط بین کنترلپذیری (پایداریپذیری)، رویتپذیری (مشاهدهپذیری) و کنترلپذیری روی دایره واحد و پاسخهای حالت ماندگار معادله ریکاتی و فیلتر کالمن پایدار تشریح میشود.
مدت زمان آموزش: پنجاه و هشت دقیقه
حجم فایل: 76 مگابایت
محتویات درس: فیلم با کیفیت 720p و پاورپوینت درس
پیش نمایش جلسه سی و یکم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه سی و دوم :
در این جلسه فیلتر های آلفا-بتا و آلفا-بتا-گاما معرفی میشوند. ابتدا فیلتر آلفا-بتا که یک فیلتر کالمن حالت ماندگار برای سیستم نیوتونی مرتبه دو است، معرفی شده و کواریانسهای حالت ماندگار و بهره حالت ماندگار آن استخراج میشوند. در ادامه فیلتر آلفا-بتا-گاما که یک فیلتر کالمن حالت ماندگار برای سیستم نیوتونی مرتبه سه است، معرفی شده و کواریانسها و بهره حالت ماندگار آن ارائه میشوند. همچنین مفهوم اندیس مانور هدف (Target Maneuvering Index) تشریح میشود. در انتها مقادیر آلفا و بتا برای فیلتر آلفا-بتا (تمرین کامپیوتری 7-11) و آلفا، بتا و گاما برای فیلتر آلفا-بتا-گاما (تمرین کامپیوتری 7-12) بر حسب اندیس مانور هدف در محیط متلب رسم شده و نتایج نمودارها به طور کامل تحلیل شده و با مقادیر بدست آمده از روش تحلیلی مقایسه میشوند. نمودارها نشان میدهد که نتایج بدست آمده با نتایج موجود در کتاب Bar-Shalom تطبیق دارد.
مدت زمان آموزش: پنجاه و نه دقیقه
حجم فایل: 90 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس و کدهای متلب
پیش نمایش جلسه سی و دوم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه سی و سوم :
در این جلسه رویکرد همیلتونین برای پیدا کردن ماتریس کواریانس پیشین و در نتیجه بهره فیلتر کالمن در حالت ماندگار معرفی میشود. ابتدا ماتریس همیلتونین معرفی میشود و سپس نحوه استخراج ماتریس کواریانس پیشین در حالت ماندگار از آن تشریح میشود. همچنین تمام فرضیات مورد نیاز برای استفاده از این روش جهت بدیت آوردن فیلتر کالمن حالت ماندگار به تفصیل بررسی میشوند. در انتها برای یک سیستم اسکالر روش همیلتونین اعمال شده و بهره و واریانس حالت ماندگار آن محاسبه میشود.
مدت زمان آموزش: پنجاه و یک دقیقه
حجم فایل: 72 مگابایت
محتویات درس: فیلم با کیفیت 720p و پاورپوینت درس
پیش نمایش جلسه سی و سوم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه سی و چهارم :
در این جلسه فیلتر کالمن با حافظه محوشونده (Fading-Memory Kalman filter) معرفی میشود. از این روش میتوان برای مقاومسازی فیلتر کالمن در مقابل خطای مدلسازی استفاده کرده و فیلتر کالمن را نسبت به متغیرهای اندازهگیری حساستر کرد. ابتدا الگوریتم فیلتر کالمن با حافظه محو شونده استخراج شده و سپس برای یک مثال اسکالر از این روش استفاده کرده و تغییر فاکتور فراموشی بر روی پاسخ حالت ماندگار سیستم بررسی میشود. برای سیستم مثال 5-3 در فصل 5 با استفاده از روش اضافه کردن نویز فرایند ساختگی یک فیلتر کالمن طراحی شده بود که فیلتر کالمن را در مقابل خطای مدلسازی مقاوم ساخت. در اینجا برای همان سیستم با روش فاکتور فراموشی یک فیلتر کالمن طراحی شده و در محیط متلب شبیهسازی میشود. همچنین اثر فاکتور فراموشی بر روی خطای تخمین به تفصیل بحث میشود.
مدت زمان آموزش: پنجاه و شش دقیقه
حجم فایل: 93 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس و کد متلب
پیش نمایش جلسه سی و چهارم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه سی و پنجم :
در این جلسه فیلترهای کالمن مقید (Constrained Kalman Filter) مورد بررسی قرار میگیرند. چهار روش برای مقید کردن حالتها در بخش 7-5 کتاب بررسی شده که سه روش اول شامل روشهای کاهش مدل (Model Reduction)، اندازهگیریهای ایدهال (Perfect Measurements) و روش تصویرسازی (Projection) در این جلسه تشریح میشوند. همچنین سه حالت متفاوت روش تصویرسازی شامل ماکزیمم احتمال (Maximum Probability)، حداقل مربعات (Least Squares) و روش تصویرسازی کلی مفصلا بحث شده و ارتباط بین آنها مورد بررسی قرار میگیرد. در انتها علاوه بر تحلیل مثال 7-11 کتاب، دستور متلب quadprog نیز معرفی شده و از طریق آن همین مثال با روش Quadratic Programming در محیط متلب حل میشود.
مدت زمان آموزش: یک ساعت و شانزده دقیقه
حجم فایل: 98 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس و کد متلب
پیش نمایش جلسه سی و پنجم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه سی و ششم:
در این جلسه نحوه اضافه کردن قید به فیلتر کالمن با روش pdf truncation مورد بررسی قرار میگیرد. در این روش ابتدا pdf تخمین بدون قید استخراج شده و سپس با یک تبدیل، متغیر مساله برش pdf متغیرهای برداری به مساله برش pdf یک اسکالر تبدیل شده و میانگین و کواریانس pdf برش داده شده محاسبه میشود. این مراحل برای تمام قیود تکرار شده و در نهایت تخمین مقید از تخمین بدون قید (خروجی فیلتر کالمن استاندارد) بدست میآید. در انتها کد مثال 7-12 اجرا شده و نتایج روشهای فیلتر کالمن استاندارد، اندازهگیری ایدهال، تصویرسازی ماکزیمم احتمال و حداقل مربعات تحلیل میشوند.
مدت زمان آموزش: یک ساعت و پنج دقیقه
حجم فایل: 96 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس و کد متلب
پیش نمایش جلسه سی و ششم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه سی و هفتم :
در این جلسه تمرین کامپیوتری 7-13 به طور کامل حل شده و در متلب شبیهسازی میشود. در ابتدا دستور (تابع) pdftrun معرفی میشود که برای اعمال قیدهای نامساوی برای هر سیستم با ابعاد دلخواه به کار میرود. سپس دینامیک پیوسته سیستم در محیط متلب گسسته شده و فیلترهای کالمن استاندارد، روش تصویرسازی (حداقل مربعات) و روش برش pdf (با استفاده از تابع pdftrun) برای سیستم گسسته شده پیادهسازی میشوند. نتایج شبیهسازی شامل اندازه خطای تخمین، کواریانس و بهره ها برای سه روش تحلیل شده و همچنین زمان محاسبات روشها (که معیاری از بار محاساتی میباشند) باهم مقایسه میشوند.
مدت زمان آموزش: یک ساعت و یازده دقیقه
حجم فایل: 123 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس و کدهای متلب
پیش نمایش جلسه سی و هفتم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه سی و هشتم :
در این جلسه فصل هشتم کتاب را که مربوط به فیلتر کالمن پیوسته یا فیلتر کالمن-بوسی (KBF(Kalman Bucy Filter است، آغاز خواهیم کرد. ابتدا نویز فرایند و اندازهگیری پیوسته معرفی شده و رابطه آنها با نویز فرایند و اندازهگیری گسسته بیان میشود. در ادامه با استفاده از معادلات فیلتر کالمن گسسته، معادلات فیلتر کالمن پیوسته استخراج میشود. نشان داده میشود که کواریانس فیلتر کالمن پیوسته از معادله دیفرانسیل ریکاتی بدست میآید. در انتها برای دو مثال اسکالر، فیلتر کالمن پیوسته طراحی شده و به صورت تحلیلی حل میشود.
مدت زمان آموزش: یک ساعت و پنج دقیقه
حجم فایل: 85 مگابایت
محتویات درس: فیلم با کیفیت 720p و پاورپوینت درس
پیش نمایش جلسه سی و هشتم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه سی و نهم :
در این جلسه تمرینات کامپیوتری 8-11 و 8-12 به طور کامل حل میشوند. برای تمرین 8-11، ابتدا به صورت تحلیلی کواریانس محاسبه میشود و سپس سیستم در محیط متلب شبیهسازی شده و کواریانس از نتایج شبیهسازی نیز محاسبه میشود که هر دو به یک مقدار منتهی میشوند.
در ادامه کواریانس حالت ماندگار برای تمرین 8-12 از روش تحلیلی محاسبه میشود. سپس سیستم و فیلتر کالمن پیوسته طراحی شده هم در محیط m-file و هم در محیط سیمولینک شبیهسازی میشود. نتایج نشان میدهد که کواریانس حالت ماندگار برای تمامی حالتها به یک نتیجه منجر میشود.
توجه: در سطر 17 کد Exercise_8_12 به اشتباه به جای (expm(AT از (expm(A استفاده شده است که باعث میشود کمی نتایج تغییر کنند. البته در کد آپلود شده در سایت این اشتباه اصلاح شده و فقط داخل فیلم این اشتباه وجود دارد.
مدت زمان آموزش: پنجاه و نه دقیقه
حجم فایل: 101 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس و کدهای متلب
پیش نمایش جلسه سی و نهم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه چهلم :
با توجه به مشکلات محاسباتی در حل معادله دیفرانسیل ریکاتی، سه روش دیگر حل معادله ریکاتی ارائه شدهاند. در این جلسه روش ماتریس گذر (Transition Matrix Approach) معرفی شده و طی یک مثال نحوه محاسبه ماتریس کواریانس از این روش تشریح میشود. در ادامه تمرینات کامپیوتری 8-7 و 8-13 که توسعه یافته همین مثال هستند مورد بررسی قرار میگیرند.
ابتدا ماتریس کواریانس در حالت ماندگار از روش تحلیلی ماتریس گذر محاسبه میشود. سپس فیلتر کالمن پیوسته به دو شکل استاندارد (متغیر با زمان) و با بهره ثابت (فیلتر کالمن حالت ماندگار) در محیط متلب شبیهسازی میشوند. نتایج شبیهسازی نشان میدهد که از هر دو روش تحلیلی (ماتریس گذر) و شبیهسازی (انتگرالگیری از معادله ریکاتی) جوابهای یکسان حاصل میشود. همچنین نقش گامهای زمانی انتگرالگیری در نتایج شبیهسازی تحلیل میشود.
در نهایت برای همین سیستم یک فیلتر کالمن پیوشته با روش انتگرالگیری و یک فیلتر کالمن پیوسته با روش ماتریس گذر طراحی شده و در محیط متلب شبیهسازی میشوند. با محاسبه مدت زمان لازم برای اجرای دستورات در کد (که معیاری از میزان محاسبات است)، نشان داده میشود که همیشه فیلتر کالمن استاندارد محاسبات بیشتری داشته و زمان بیشتری نیاز دارد.
مدت زمان آموزش: یک ساعت و بیست و پنج دقیقه
حجم فایل: 131 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس و کدهای متلب
پیش نمایش جلسه چهلم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه چهل و یکم :
در این جلسه یک روش دیگر برای کاهش محاسبات مربوط به ماتریس کواریانس و بهره فیلتر کالمن به نام الگوریتم چاندارسکار (Chandrasekhar) ارائه میشود. این روش بر اساس کار یک اختر-فیزیکدان هندی-آمریکایی به همین نام گرفته شده و در حالتی که ماتریسهای سیستم و کواریانسهای نویز ثابت باشند، در حالت خاصی میتواند به کاهش بار محاسباتی فیلتر کالمن منجر شود.
ابتدا الگوریتم فیلتر کالمن با استفاده از تجزیه چاندراسکار (Chandrasekhar Factorization) استخراج میشود و سپس تجزیه چاندراسکار معرفی میشود. در انتها تمرین 8-3 کتاب به صورت تحلیلی داده شده و سپس دو فیلتر کالمن استاندارد و چاندراسکار در محیط متلب پیادهسازی شده و نتایج مقایسه و تحلیل میشوند. ملاحظه میشود که زمان لازم برای محاسبات فیلتر کالمن چاندراسکار کمتر از فیلتر کالمن استاندراد است.
مدت زمان آموزش: یک ساعت و نه دقیقه
حجم فایل: 105 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس و کدهای متلب
پیش نمایش جلسه چهل و یکم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه چهل و دوم :
در این جلسه روش فیلترینگ ریشه دوم (Square Root Filtering) برای سیستمهای پیوسته معرفی میشود. این روش نسبت به فیلتر کالمن استاندارد پیوسته، بار محاسباتی بالاتری دارد اما دقت آن دو برابر بوده و پایداری عددی بهتری دارد. در جلسات 23 تا 25 (بخش 6-3 کتاب) فیلتر کالمن ریشه دوم برای سیستمهای گسسته معرفی شد.
ابتدا الگوریتم فیلتر کالمن ریشه دوم پیوسته داخل کتاب معرفی میشود. سپس با توجه به دستورات متلب در دسترس، الگوریتم فیلتر کالمن ریشه دوم پیوسته به گونهای اصلاح میشود تا بتوان با دستورات موجود این روش را در محیط متلب پیادهسازی کرد. در انتها فیلتر کالمن ریشه دوم پیوسته بر روی سیستم نیوتونی مرتبه سه (تمرین 8-3) پیادهسازی شده و اثر کاهش دقت محاسبات بر روی عملکرد این فیلتر مورد بررسی قرار میگیرد.
مدت زمان آموزش: پنجاه و چهار دقیقه
حجم فایل: 86 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس و کدهای متلب
پیش نمایش جلسه چهل و دوم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه چهل و سوم :
در این جلسه فیلتر کالمن پیوسته اصلاح شده برای سیستمهای دارای نویزهای همبسته و رنگی مورد بحث قرار میگیرند. ابتدا نحوه اصلاح فیلتر کالمن برای تخمین حالتهای سیستمهای دارای نویز فرایند و اندازهگیری همبسته معرفی میشود. سپس نحوه اصلاح فیلتر کالمن پبوسته برای سیستمهای دارای نویز اندازهگیری رنگی مورد بحث قرار میگیرد.
در ادامه تمرین کامپیوتری 8-14 کتاب به صورت کامل حل شده و فیلترهای مختلف (استاندارد و همبسته) برای سیستمهای مختلف (با نویزهای همبسته و نا همبسته) در محیط سیمولینک متلب شبیهسازی میشوند. در انتها تمامی متغیرهای سیستم اعم از واریانسهای خطای تخمین، بهره فیلترها، تخمین حالتها (زاویه ژیروسکوپ و نرخ تغییرات دریفت) و همچنین جذر میانگیم مربعات خطا (RMSE) برای فیلترهای مختلف باهم مقایسه شده و نتایج تحلیل میشوند.
با توجه به اینکه در مورد شبیهسازی سیستمهای پیوسته در محیط سیمولینک توضیحات تقریبا مفصلی داده شده، اگر آشنایی کمی با محیط سیمولینک دارید، توصیه میکنم حتما این جلسه را مشاهده کنید.
مدت زمان آموزش: یک ساعت و چهل و سه دقیقه
حجم فایل: 163 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس و کدهای متلب و فایلهای شبیهسازی
پیش نمایش جلسه چهل و سوم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه چهل و چهارم:
در این جلسه ابتدا فیلتر کالمن پیوسته حالت ماندگار معرفی شده و نحوه محاسبه بهره حالت ماندگار فیلتر کالمن از طریق حل معادله جبری ریکاتی پیوسته (CARE (Continuous Algebraic Riccati Equation تشریح میشود. قضایای وجود جواب برای CARE بحث شده و روشهای مختلف حل CARE از جمله محاسبه از طریق دستور متلب care مفصلا تشریح میشوند. سپس رابطه فیلتر وینر با فیلتر کالمن بیان شده و همچنین دوگانی (Duality) بین مساله کنترل بهینه و تخمین بهینه مطرح میشود.
در انتها تمرین کامپیوتری 8-15 کتاب به طور کامل حل شده و از روشهای مختلف از جمله شبیهسازی معادله دیفرانسیل ریکاتی، روش تحلیلی موجود در کتاب و دستور care متلب پاسخ معادله ریکاتی در حالت ماندگار محاسبه شده و نتایج بدست آمده با استفاده از قضایای فوق تحلیل میشوند.
مدت زمان آموزش: یک ساعت و چهارده دقیقه
حجم فایل: 120 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس، کتاب بوسی و کدهای متلب
پیش نمایش جلسه چهل و چهارم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه چهل و پنجم :
در این جلسه فصل نهم کتاب را آغاز کرده و به معرفی هموارسازی بهینه (Optimal Smoothing) به عنوان روشی برای بهبود تخمین حالت خواهیم پرداخت. ابتدا مفهوم هموارسازی بیان شده و سپس انواع هموارسازها شامل هموارساز نقطه ثابت (Fixed-point Smoother) ، هموارساز تاخیر ثابت (Fixed-lag Smoother) و هموارساز بازه ثابت (Fixed-interval Smoother) معرفی میشوند.
در ادامه یک فرمولبندی جدید برای فیلتر کالمن ارائه میشود که تک مرحلهای بوده و برای استخراج هموارساز ضروری است. در نهایت معادلات هموارساز نقطه ثابت بر اساس فرمولبندی جدید استخراج شده و الگوریتم آن ارائه میشود.
مدت زمان آموزش: پنجاه و نه دقیقه
حجم فایل: 78 مگابایت
محتویات درس: فیلم با کیفیت 720p و پاورپوینت درس
پیش نمایش جلسه چهل و پنجم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه چهل و ششم :
در ابتدای این جلسه اثبات میشود که هموارساز نقطه ثابت نسبت به فیلتر کالمن استاندارد همیشه تخمین بهتری نتیجه میدهد. سپس مساله تخمین یک بردار ثابت از طریق فیلتر کالمن استاندارد و هموارساز نقطه ثابت بررسی میشود. در ادامه مثال 9-1 کتاب از طریق اجرای کد آماده موجود در سایت Dan Simon اجرا میشود.
با توجه به عدم کلیت کد موجود، یک تابع کلی تر و جامع تر (FPS) معرفی میشود که از طریق آن میتوان برای هر سیستم دلخواه تخمین هموار شده با روش نقطه ثابت را بدست آورد. بعد از تشریح ورودیها و خروجیهای این تابع و نحوه عملکرد آن، از آن برای حل مثال 9-1 کتاب استفاده شده و به همان نتایج موجود در کتاب میرسیم. در انتها نحوه شبیهسازی مونت کارلو (Monte Carlo) سیستم و استخراج میانگین و واریانس خطای تخمین هموارساز از طریق شبیهسازی بیان شده و با نتایج تحلیلی مقایسه میشوند.
مدت زمان آموزش: یک ساعت و بیست و هفت دقیقه
حجم فایل: 152 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس و کدهای متلب
پیش نمایش جلسه چهل و ششم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه چهل و هفتم :
در این جلسه هموارسازی تاخیر ثابت معرفی میشود. ابتدا بردار حالت توسعه داده شده و سپس از معادلات فیلتر کالمن اندرسون که در ابتدای فصل اشاره شد، استفاده کرده و معادلات فیلتر کالمن برای سیستم با بردار اضافه شده (Augmented State) محاسبه میشود. سپس الگوریتم هموارساز تاخیر ثابت و ارتباط آن با فیلتر کالمن استاندارد تشریح میشود. در نهایت کدهای متلب مربوط به مثال 9-2 کتاب مرور شده و نتایج شبیهسازی تحلیل میشوند.
مدت زمان آموزش: یک ساعت و پنج دقیقه
حجم فایل: 96 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس و کد متلب
پیش نمایش جلسه چهل و هفتم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه چهل و هشتم :
در این جلسه هموارسازی بازه ثابت مورد بررسی قرار میگیرد. دو نوع هموارسازی بازه ثابت وجود دارند که اولی هموارسازی Forward-Backward است و دومی روش RTS است. در این جلسه هموارسازی Forward-Backward معرفی میشود که از دو فیلتر رو به جلو و رو به عقب برای تخمین حالت در یک بازه که اندازهگیریها در آن مشخص هستند استفاده میکند. فیلتر رو به جلو همان فیلتر کالمن استاندارد بوده و فیلتر رو به عقب فیلتر اطلاعات (بخش 6-2 کتاب – جلسه 22) است. در ادامه نحوه ترکیب تخمینها و کواریانسهای بدست آمده از این دو فیلتر بیان شده و الگوریتم اصلاح شده هموارساز Forward-Backward ارائه میشود. در نهایت مثال 9-3 کتاب با کد آماده موجود در سایت Dan Simon در محیط متلب شبیهسازی شده و نتایج تحلیل میشوند.
مدت زمان آموزش: یک ساعت و بیست و هشت دقیقه
حجم فایل: 126 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس و کد متلب
پیش نمایش جلسه چهل و هشتم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه چهل و نهم :
در این جلسه مثال 9-3 کتاب و تمرین کامپیوتری 9-17 به طور کامل حل میشود. ابتدا تابع FBS جهت پیادهسازی الگوریتم هموارسازی Forward-backward معرفی شده و تمام ورودیها و خروجیهای آن تشریح میشود. همچنین نحوه اضافه کردن آن به تولباکس ekf/ukf بیان میشود. سپس با استفاده از این تابع، مثال 9-3 کتاب حل شده و به نتایج مشابه کتاب میرسیم. در ادامه با استفاده از دستور FBS تمرین کامپیوتری 9-17 نیز حل شده و در محیط متلب شبیهسازی میشود.
مدت زمان آموزش: یک ساعت و هجده دقیقه
حجم فایل: 141 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس و کدهای متلب
پیش نمایش جلسه چهل و نهم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه پنجاهم :
در این جلسه روش هموارسازی (RTS (Rauch-Tung-Striebel که جزو روشهای هموارسازی بازه ثابت است، معرفی میشود. این روش نسبت به FBS بار محاسباتی کمتری دارد اما استخراج روابط پیچیدهتر از آن است. ابتدا معادلات بروزرسانی کواریانس خطای تخمین برای RTS بدست آمده و سپس با استفاده از چند لم، معادلات بروزرسانی تخمین حالت RTS استخراج میشوند. در انتها الگوریتم کامل هموارسازی RTS ارائه میشود.
مدت زمان آموزش: یک ساعت و شانزده دقیقه
حجم فایل: 96 مگابایت
محتویات درس: فیلم با کیفیت 720p و پاورپوینت درس
پیش نمایش جلسه پنجاهم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه پنجاه و یکم :
در این جلسه تمرینات کامپیوتری 9-15 و 9-16 به طور کامل حل میشوند. در ابتدا تابع مورد نیاز (rts_smooth) برای پیادهسازی هموارساز RTS در تولباکس ekf/ukf معرفی میشود. سپس هموارساز RTS برای تمرین کامپیوتری 9-15 (و 9-16) با استفاده از این دستور در محیط متلب پیادهسازی شده و نتایج تحلیل میشوند.
در ادامه مفهوم هموارپذیری (Smoothability) از کتاب تخمین بهینه کاربردی تالیف Arthur Gelb معرفی شده و سیستم تمرین 9-15 از لحاظ هموارپذیری مورد بررسی قرار میگیرد. در انتها نتایح تحلیلی ارائه شده با شبیهسازی تطبیق داده میشود. همچنین واریانسهای بدست آمده با استفاده از روش مونت کارلو نیز محاسبه شده و با نتایج تحلیلی مقایسه میشوند.
مدت زمان آموزش: یک ساعت و بیست و شش دقیقه
حجم فایل: 162 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس، کتاب Arthur Gelb و کدهای متلب
پیش نمایش جلسه پنجاه و یکم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه پنجاه و دوم :
در این جلسه فصل دهم که مربوط به مباحث تکمیلی مربوط به فیلتر کالمن خطی است، آغاز میشود. در ابتدا نحوه تست کردن عملکرد فیلتر کالمن بدون در دست داشتن مقادیر واقعی حالتها بیان میشود. این کار از طریق محاسبه میانگین و کواریانس مانده (Residual) یا همان نوآوری (Innovation) انجام میشود. در ادامه تمرین کامپیوتری 10-14 به طور کامل حل شده و در متلب شبیهسازی میشود و نشان داده میشود که چگونه میتوان بدون در دست داشتن مقادیر واقعی حالتها، از عدم مدلسازی درست سیستم مطلع شد.
مدت زمان آموزش: یک ساعت و هفده دقیقه
حجم فایل: 107 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس و کد متلب
پیش نمایش جلسه پنجاه و دوم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه پنجاه و سوم :
در این جلسه فیلتر کالمن مدل چندگانه (Multiple-model Kalman Filter) معرفی میشود. در مواردی که از مدل دقیق سیستم اطلاع نداشته باشیم و تنها احتمال بدهیم که پارامترهای سیستم متعلق به یک مجموعه هستند، میتوان برای هر حالت یک فیلتر کالمن اجرا کرده و تخمین و کواریانس نهایی را از ترکیب تخمین هر کدام از فیلترهای کالمن بدست آورد. همچنین میتوان احتمال وقوع هر کدام از حالتها را محاسبه کرده و در نهایت پارامترهای واقعی سیستم را بدست آورد. در ادامه الگوریتم فیلتر کالمن مدل چندگانه استخراج شده و مثال 10-1 از کد آماده آن اجرا شده و نتایج تحلیل میشود. در انتها تمرین کامپیوتری 10-15 به طور کامل حل شده و در محیط متلب پیادهسازی میشود.
مدت زمان آموزش: یک ساعت و سی و چهار دقیقه
حجم فایل: 145 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس و کدهای متلب
پیش نمایش جلسه پنجاه و سوم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه پنجاه و چهارم :
در این جلسه فیلتر کالمن کاهش مرتبه یافته (Reduced-Order Kalman Filter) معرفی میشود. ابتدا کاربردها و لزوم کاهش مرتبه برای فیلتر کالمن تشریح میشود. در ادامه روش اندرسون (Anderson) برای کاهش مرتبه فیلتر کالمن معرفی شده و الگوریتم آن بیان میشود. سپس مثال 10-2 کتاب مورد بررسی قرار گرفته و کدهای آن در محیط متلب اجرا میشود و نتایج تحلیل میگردند.
در بخش بعدی فیلتر کالمن-اشمیت کاهش مرتبه یافته (Reduced-Order Schmidt-Kalman Filter) معرفی شده و الگوریتم آن بیان میشود. در انتها کد مثال 10-3 کتاب در متلب اجرا شده و نتایج شبیهسازی تحلیل میگردند.
مدت زمان آموزش: پنجاه و هفت دقیقه
حجم فایل: 96 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس، مقاله 2007 دن سایمون و کدهای متلب
پیش نمایش جلسه پنجاه و چهارم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه پنجاه و پنجم :
در این جلسه فیلترهای کالمن مقاوم (Robust Kalman Filters) معرفی شده و بعضی از انواع آن اجمالا بررسی میشوند. سپس یک فیلتر کالمن مقاوم در برابر نامعینیهای کواریانسهای نویزهای فرایند و اندازهگیری معرفی شده و الگوریتم آن تشریح میشود. در ادامه کد متلب مثال 10-4 با روش فوق در متلب اجرا شده و نتایج تحلیل میشوند. در انتها تمرین کامپیوتری 10-16 به صورت کامل حل شده و کد آن اجرا میشود.
مدت زمان آموزش: یک ساعت و نوزده دقیقه
حجم فایل: 121 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس و کدهای متلب
پیش نمایش جلسه پنجاه و پنجم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه پنجاه و ششم :
در این جلسه فیلتر کالمن در حضور تاخیر در اندازهگیری مورد بررسی قرار میگیرد. تاخیر ممکن است به خاطر عواملی نظیر غیرمتمرکز بودن سیستم فیلترینگ (Decentralized Filtering Systems) اتفاق بیافتد. ابتدا یک فرم دیگر از فیلتر کالمن ارائه میشود که ظاهر آن با معادلات استاندارد فیلتر کالمن متفاوت است اما بلحاظ ریاضی دقیقا معادل آن است. سپس مفهوم Retrodiction معرفی شده و با استفاده از آن تخمین و کواریانس فیلتر کالمن با اندازهگیریهای تاخیردار محاسبه میشود. در انتها الگوریتم فیلتر کالمن در حضور اندازهگیریهای تاخیردار ارائه میشود.
مدت زمان آموزش: یک ساعت و هشت دقیقه
حجم فایل: 88 مگابایت
محتویات درس: فیلم با کیفیت 720p و پاورپوینت درس
پیش نمایش جلسه پنجاه و ششم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه پنجاه و هفتم :
در این جلسه فصل 11 کتاب که مربوط به فیلتر مقاوم ∞H است، آغاز میشود. در ابتدا یک فرم جدید برای فیلتر کالمن تک مرحلهای استخراج میشود. سپس خلاصهای از محدودیتها و مفروضات فیلتر کالمن استاندارد بیان میشود و انگیزه گرایش به سمت فیلترهای مقاوم تشریح میشود. سپس مساله بهینهسازی مقید استاتیک (Static Constraint Optimization) با استفاده از ضرایب لاگرانژ (Lagrange Multipliers) مورد بررسی قرار میگیرد. در انتها مساله مینیممسازی با قید نامساوی مطرح شده و الگوریتم روش مجموعه فعال (Active-Set Method) ارائه میشود.
مدت زمان آموزش: یک ساعت و ده دقیقه
حجم فایل: 90 مگابایت
محتویات درس: فیلم با کیفیت 720p و پاورپوینت درس
پیش نمایش جلسه پنجاه و هفتم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه پنجاه و هشتم :
در ابتدای این جلسه مساله بهینهسازی مقید دینامیک (Dynamic Constrained Optimization) مورد بررسی قرار میگیرد. سپس بحث تئوری بازی به طور خلاصه مطرح شده و کاربرد آن در مساله ∞H تشریح میشود. بعد تعریف یک تابع هزینه که از تئوری بازی بدست آمده، با روش بهینهسازی مقید دینامیک تلاش میشود تا مساله مینیمکس (Minimax) موجود حل شده و نقطه سکون بدست آید. در انتهای جلسه نقطه سکون (ماکزیمم) استخراج میشود.
مدت زمان آموزش: یک ساعت و سیزده دقیقه
حجم فایل: 92 مگابایت
محتویات درس: فیلم با کیفیت 720p و پاورپوینت درس
پیش نمایش جلسه پنجاه و هشتم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه پنجاه و نهم :
در ابتدای این جلسه نقطه سکون (مینیمم) از دید طراح استخراج میشود. در واقع مقداری از تخمین محاسبه میشود که تابع هزینه را مینیمم کند و در نهایت نقطه زینی (Saddle Point) محاسبه میشود. در ادامه الگوریتم فیلتر ∞H گسسته ارائه میشود. در انتها فیلترهای ∞H و کالمن باهم مقایسه شده و شباهتها و تفاوتشان به تفصیل بحث میشود.
مدت زمان آموزش: یک ساعت و هشت دقیقه
حجم فایل: 90 مگابایت
محتویات درس: فیلم با کیفیت 720p و پاورپوینت درس
پیش نمایش جلسه پنجاه و نهم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه شصتم :
در ابتدای این جلسه معادلات فیلتر ∞H گسسته را جهت وارد کردن ورودی کنترلی اصلاح کرده و الگوریتم اصلاح شده ارائه میشود. سپس دستور (تابع) HIF معرفی میشود که برای پیادهسازی فیلتر ∞H گسسته برای هر سیستم دلخواه (دارای ورودی یا بدون آن) میتواند مورد استفاده قرار گیرد. در ادامه ورودیها و خروجیهای آن توصیف شده و نحوه اضافه کردن آن به مسیر پیش فرض متلب جهت استفاده در تمام مسیرهای سیستم (کامپیوتر) تشریح میشود. سپس دستور corr_rnd که در جلسه 19 معرفی شده بود، به گونهای اصلاح میشود که بتواند نویزهای دارای بایاس (میانگین غیر صفر) را نیز تولید کند. در انتها سیستم شناور مغناطیسی (Magnetic Levitation) به صورت مختصر معرفی شده و برای دینامیک خطی شده (و گسسته شده) آن با استفاده از دستور HIF فیلتر ∞H طراحی شده و به همراه فیلتر کالمن استاندارد در محیط متلب شبیهسازی میشود و نتایج به طور کامل مقایسه و تحلیل میشوند.
مدت زمان آموزش: یک ساعت و سیزده دقیقه
حجم فایل: 141 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس، مقاله Sinha 2004 و کدهای متلب
پیش نمایش جلسه شصتم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه شصت و یکم :
در این جلسه فیلتر ∞H حالت ماندگار معرفی میشود. ابتدا معادلات فیلتر ∞H حالت ماندگار ارائه شده و سپس معادله جبری ریکاتی زمان گسسته (Discrete-Time Algebraic Riccati Equation) معرفی شده و نحوه حل آن با دستور dare متلب بیان میشود. در ادامه ارتباط بین فیلتر ∞H حالت ماندگار و نرم بینهایت سیستم با ورودی نویز و خروجی خطای تخمین بیان شده و طی یک مثال ماکزیمم بهره سیستم و باند بالای فیلتر ∞H حالت ماندگار مقایسه میشوند.
مدت زمان آموزش: یک ساعت و پنج دقیقه
حجم فایل: 89 مگابایت
محتویات درس: فیلم با کیفیت 720p و پاورپوینت درس
پیش نمایش جلسه شصت و یکم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه شصت و دوم :
در این جلسه تمرینات کامپیوتری 11-14 و 11-15 کتاب حل میشود. در ابتدا تمرین 11-7 که پایه مساله 11-14 است به طور کامل حل شده و نتایج تحلیلی محاسبه میشوند. سپس در تمرین 11-14 فیلتر و سیستم شبیهسازی شده و به همان نتایج تحلیلی میرسیم. در ادامه تمرین 11-15 نیز به طور کامل حل شده و در محیط متلب شبیهسازی شده و نتایج آن تحلیل میشود.
مدت زمان آموزش: یک ساعت و یازده دقیقه
حجم فایل: 131 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس و کدهای متلب
پیش نمایش جلسه شصت و دوم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه شصت و سوم :
در این جلسه ابتدا فیلتر ∞H پیوسته زمان معرفی شده و معادلات آن ارائه میشود. سپس طی یک مثال عملکرد آن با فیلتر کالمن مقایسه میشود. در ادامه مانند حالت زمان گسسته، باند بالای نرم بینهایت سیستم از ورودی اغتشاش به خطای تخمین محاسبه میشود. در انتها یک روش تابع تبدیل برای فیلتر ∞H معرفی شده و معادلات آن برای حالت ماندگار ارائه میشود.
مدت زمان آموزش: چهل و پنج دقیقه
حجم فایل: 62 مگابایت
محتویات درس: فیلم با کیفیت 720p و پاورپوینت درس
پیش نمایش جلسه شصت و سوم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه شصت و چهارم :
در این جلسه فصل دوازدهم که مربوط به روشهای پیشرفتهتر تخمین است، آغاز میشود. ابتدا فیلتر کالمن ∞H ترکیبی (Mixed Kalman/H∞ Filtering) معرفی شده و سپس الگوریتم آن ارائه میشود. سپس مثال 12-1 به همراه کد متلب آن مرور شده و نتایج تحلیل میشوند. در ادامه روش ترکیب هیبریدی (Hybrid) بهره دو فیلتر کالمن و ∞H معرفی میشود. در انتها تمرین کامپیوتری 12-8 به طور کامل حل شده و در محیط متلب شبیهسازی میشود و نتایج تحلیل میشوند.
مدت زمان آموزش: پنجاه و سه دقیقه
حجم فایل: 86 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس و کدهای متلب
پیش نمایش جلسه شصت و چهارم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه شصت و پنجم :
در این جلسه فیلتر کالمن ∞H مقاوم (Robust Kalman/H∞ Filter) به عنوان یک فیلتر مقاوم در برابر نامعینیهای پارامتری معرفی میشود. ابتدا ساختار تخمینگر و الگوریتم آن ارائه شده و نحوه محاسبه بهره و ماتریس حلقه بسته تخمینگر بیان میشود. سپس مثال 12-2 کتاب به همراه کد متلب آن مرور میشود. در ادامه یک تابع (دستور) جدید بنام RKHinf معرفی میشود که با استفاده از آن میتوان برای هر سیستم با ابعاد دلخواه فیلتر کالمن ∞H مقاوم طراحی کرد. در انتها با استفاده از دستور RKHinf تمرین کامپیوتری 12-9 به طور کامل حل شده و در محیط متلب شبیهسازی میشود. ملاحظه میشود که نتایج بدست آمده از شبیهسازی با مقادیر تحلیلی آنها تطابق کامل دارد.
مدت زمان آموزش: یک ساعت و بیست و هفت دقیقه
حجم فایل: 154 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس، کدهای متلب و مقاله Hung2003
پیش نمایش جلسه شصت و پنجم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه شصت و ششم :
در این جلسه فیلتر ∞H مقید (Constrained H∞ Filter) معرفی میشود. مانند فیلتر کالمن مقید که در جلسه 35 تا 37 مورد بررسی قرار گرفت، فیلتر ∞H را هم میتوان تحت قیود تساوی و یا ناتساوی طراحی کرد. روش ارائه شده توسط خود Dan Simon در سال 2006 معرفی شده و قابلیت توسعه برای قیود ناتساوی را دارد. ابتدا مساله مینیمکس برای فیلتر ∞H مقید تعریف شده و سپس الگوریتم آن ارائه میشود. همچنین یک الگوریتم دیگر برای فیلتر ∞H بدون قید استخراج میشود. در انتها مثال 12-3 کتاب مرور شده و نتایج شبیهسازی کد متلب آن تحلیل میشوند.
مدت زمان آموزش: یک ساعت و بیست و هفت دقیقه
حجم فایل: 174 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس، کدهای متلب و مقاله Simon2006
پیش نمایش جلسه شصت و ششم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه شصت و هفتم :
در این جلسه تمرین کامپیوتری 12-10 به طور کامل حل میشود. ابتدا دستور UHinf معرفی میشود که برای پیادهسازی فیلتر ∞H بدون قید با ابعاد دلخواه میتوان از آن استفاده نمود. سپس دستور CHinf معرفی میشود که برای پیادهسازی فیلتر ∞H مقید (طبق روش بخش 12-3 کتاب) میتوان از آن استفاده نمود. از هر دوی این دستورات زمانی میتوان استفاده نمود که معادلات اندازهگیری و قیود نرمالیزه شده باشند (طبق بخش 12-3 کتاب). سپس تمرین کامپیوتری 12-10 با استفاده از این دستورات در محیط متلب شبیهسازی شده و نتایج تحلیل میشوند.
مدت زمان آموزش: پنجاه و نه دقیقه
حجم فایل: 105 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس و کدهای متلب
پیش نمایش جلسه شصت و هفتم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه شصت و هشتم :
در این جلسه فصل 13 که مربوط به فیلترهای غیرخطی است، آغاز میشود. ابتدا ضرورت استفاده از فیلترهای غیرخطی بیان شده و سپس انواع توسعه یافته فیلتر کالمن برای سیستمهای غیرخطی مرور میشود. در ادامه فیلتر کالمن خطیسازی شده (LKF (Linearized Kalman Filter معرفی شده و الگوریتم آن ارائه میشود. سپس تمرین کامپیوتری 13-16 با استفاده از فیلتر LKF حل شده و در محیط متلب شبیهسازی میشود. در انتها علت عملکرد ضعیف این فیلتر بیان شده و نحوه بهبود عملکرد آن تشریح میشود.
مدت زمان آموزش: یک ساعت و بیست و یک دقیقه
حجم فایل: 122 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس و کد متلب
پیش نمایش جلسه شصت و هشتم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه شصت و نهم :
در این جلسه فیلتر کالمن توسعه یافته پیوسته (Continuous Extended Kalman Filter) یا فیلتر کالمن-بوسی توسعه یافته (EKBF (Extended Kalman-Bucy Filter معرفی میشود. ابتدا فلسفه فیلترهای توسعه یافته و تفاوت آنها با LKF مورد بررسی قرار گرفته و سپس الگوریتم EKBF ارائه میشود. در ادامه مثال 13-1 به همراه کد متلب آن مرور میشود. در انتها ادامه تمرین کامپیوتری 13-16 حل شده و فیلترهای LKF و EKBF برای سیستم این تمرین پیادهسازی شده و نتایج دو فیلتر مقایسه شده و تحلیل میشوند.
توجه: در سطر 13 کد Exercise_13_16 ماتریس کواریانس نویز اندازهگیری به اشتباه دارای مقادیر انحراف معیار هستند که باید به جای آنها مجدورشان (واریانسها) جاگذاری شود. در کد آپلود شده در سایت این اشتباه اصلاح شده و فقط داخل فیلم این اشتباه وجود دارد. البته با این اصلاح نتایج شبیهسازی تفاوت چندانی نمیکند.
مدت زمان آموزش: پنجاه و نه دقیقه
حجم فایل: 99 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس و کدهای متلب
پیش نمایش جلسه شصت و نهم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه هفتادم :
در این جلسه فیلتر کالمن توسعه یافته هیبریدی (Hybrid Extended Kalman Filter) معرفی میشود که در آن معادلات سیستم پیوسته بوده و معادلات اندازهگیری گسسته هستند. ابتدا الگوریتم HEKF ارائه میشود و سپس مثال 13-2 کتاب به همراه کد متلب آن مرور میگردد. در ادامه تمرین کامپیوتری 13-17 به طور کامل حل شده و از طریق روش Monte-Carlo انحراف معیار خطای تخمین با استفاده از نتایج شبیهسازی محاسبه و تحلیل میشود.
مدت زمان آموزش: یک ساعت و سی و پنج دقیقه
حجم فایل: 156 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس و کدهای متلب
پیش نمایش جلسه هفتادم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه هفتاد و یکم :
در این جلسه فیلتر کالمن توسعه یافته گسسته Discrete Extended Kalman Filter معرفی میشود. ابتدا الگوریتم EKF استخراج شده و ارائه میشود. در ادامه تمرین 3-13 و تمرین کامپیوتری 13-15 حل میشوند. در واقع فیلترهای EKF و میانگین متحرک (Moving Average Filter) برای سیستم مساله 13-3 طراحی شده و به روش تحلیلی میانگین و واریانس خطای تخمین برای هر دو فیلتر محاسبه میشوند. در نهایت با پیادهسازی و شبیهسازی دو فیلتر (تمرین کامپیوتری 13-15) در محیط متلب (با روش Monte-Carlo)، مقادیر میانگین و واریانس خطای تخمین برای هر دو فیلتر با مقادیر بدست آمده تحلیلیشان مقایسه میشوند.
مدت زمان آموزش: یک ساعت و بیست و هشت دقیقه
حجم فایل: 113 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس و کد متلب
پیش نمایش جلسه هفتاد و یکم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه هفتاد و دوم :
در این جلسه نحوه پیادهسازی فیلتر کالمن توسعه یافته گسسته یا EKF توسط تولباکس ekf/ukf آموزش داده میشود. ابتدا نوتیشن مورد استفاده در تولباکس از راهنمای آن مرور شده و توابع ekf_predict1 و ekf_update1 که به ترتیب برای مراحل بروزرسانی زمانی و بروزرسانی اندازهگیری استفاده میشوند، تشریح میشوند. در ادامه نحوه تعریف معادلات غیرخطی و ماتریسهای ژاکوبین برای استفاده در این دو تابع، از طریق توابع و handle ها بیان میشوند. در نهایت از این توابع برای تخمین پارامترهای یک سیگنال سینوسی تصادفی استفاده کرده و کدهای مربوطه در محیط متلب اجرا میشوند.
مدت زمان آموزش: یک ساعت و نوزده دقیقه
حجم فایل: 150 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس، راهنمای تولباکس ekf/ukf و کدهای متلب
پیش نمایش جلسه هفتاد و دوم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه هفتاد و سوم :
در ابتدای این جلسه هموارساز RTS برای فیلتر کالمن توسعه یافته معرفی شده و نحوه استفاده از دستور erts_smooth1 موجود در تولباکس ekf/ukf، برای هموارسازی تخمینهای بدست آمده از فیلتر EKF تشریح میشود. سپس تمرین کامپیوتری 13-21 کتاب به طور کامل حل میشود. ابتدا با استفاده از دستورات موجود در تولباکس ekf/ukf فیلتر EKF گسسته و هموارساز RTS برای سیستم طراحی شده و در محیط متلب شبیهسازی میشوند. در انتها با استفاده از روش Monte-Carlo، انحراف معیارهای تجربی برای هر دو تخمین EKF و RTS محاسبه شده و با مقادیر تحلیلیشان مقایسه میشوند.
مدت زمان آموزش: یک ساعت و بیست و یک دقیقه
حجم فایل: 130 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس، راهنمای تولباکس ekf/ukf و کدهای متلب
پیش نمایش جلسه هفتاد و سوم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه هفتاد و چهارم :
در این جلسه فیلتر کالمن توسعه یافته تکراری Iterated Extended Kalman Filter) IEKF) معرفی میشود. ابتدا الگوریتم IEKF بیان شده و سپس تابع iekf_update1 برای پیادهسازی مرحله بروزرسانی اندازهگیری IEKF معرفی میشود. در ادامه تمرین کامپیوتری 13-18 حل شده و فیلترهای EKF و IEKF (با استفاده از تابع iekf_update1) برای سیستم این مساله طراحی شده و در محیط متلب شبیهسازی و مقایسه میشوند.
توجه: در سطر 27 کد Exercise_13_18 به اشتباه به جای ((feval(f,x(:,i-1 از ((feval(f,x(:,i استفاده شده است که باعث میشود کمی نتایج تغییر کنند. البته در کد آپلود شده در سایت این اشتباه اصلاح شده و فقط داخل فیلم این اشتباه وجود دارد.
مدت زمان آموزش: یک ساعت و چهار دقیقه
حجم فایل: 108 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس و کدهای متلب
پیش نمایش جلسه هفتاد و چهارم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه هفتاد و پنجم :
در این جلسه فیلتر کالمن توسعه یافته هیبریدی مرتبه دو (Second-Order Hybrid Extended Kalman Filter) معرفی میشود. ابتدا با استفاده از جملات مرتبه دوم سری تیلور توابع غیرخطی معادلات سیستم و اندازهگیری، الگوریتم فیلتر EKF هیبریدی مرتبه دو استخراج میشود. با این کار خطای خطیسازی موجود در روش EKF مرتبه یک (EKF استاندارد) کمتر میشود. در ادامه مثال 13-3 کتاب به همراه کد متلب آن مرور شده و نتایج شبیهسازی تحلیل میشود. در این مثال روشهای EKF هیبریدی استاندارد، IEKF و EKF هیبریدی مرتبه دو به مساله سیستم در حال سقوط (که در مثال 13-2 بررسی شد)، اعمال شده و تمام حالتها تخمین زده میشود که نتایج نشاندهنده عملکرد بهتر EKF مرتبه دو است.
مدت زمان آموزش: یک ساعت و یازده دقیقه
حجم فایل: 111 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس و کد متلب
پیش نمایش جلسه هفتاد و پنجم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه هفتاد و ششم :
در این جلسه فیلتر کالمن توسعه یافته گسسته مرتبه دو (Second-Order Discrete Extended Kalman Filter) معرفی میشود. ابتدا الگوریتمهای مختلفی که برای روش EKF مرتبه دو گسسته مطرح شده است، از کتاب Dan Simon و کتاب Bar-Shalom مطرح شده و مقایسه میشوند. با توجه به کاملتر بودن الگوریتم ارائه شده در کتاب Bar-Shalom و اینکه Simo Sarkka در تولباکس ekf/ukf از آن استفاده کرده است، این فیلتر مورد بررسی قرار میگیرد. در ادامه دستورات ekf_predict2 و ekf_update2 که به ترتیب برای بروزرسانی های زمانی و اندازهگیری فیلتر EKF مرتبه دو قابل استفاده هستند، معرفی شده و طی مثال موجود در راهنمای تولباکس ekf/ukf نحوه استفاده از آنها تشریح میشود. در نهایت با استفاده از این توابع، تمرین کامپیوتری 13-18 به طور کامل حل شده و نتایج شبیهسازی تحلیل میشوند.
توجه: در سطر 29 کد Exercise_13_18 به اشتباه به جای ((feval(f,x(:,i-1 از ((feval(f,x(:,i استفاده شده است که باعث میشود کمی نتایج تغییر کنند. البته در کد آپلود شده در سایت این اشتباه اصلاح شده و فقط داخل فیلم این اشتباه وجود دارد.
مدت زمان آموزش: یک ساعت و سه دقیقه
حجم فایل: 124 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس، راهنمای تولباکس ekf/ukf، فصل 10 کتاب Bar-Shalom و کدهای متلب
پیش نمایش جلسه هفتاد و ششم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه هفتاد و هفتم :
در این جلسه نحوه تقریب یک pdf غیر گوسی با استفاده از مجموع تعدادی pdf گوسی تشریح میشود. ابتدا صورت مساله از تمرین کامپیوتری 13-19 بیان شده و سپس الگوریتم Sorenson معرفی میشود. برای پیادهسازی الگوریتم Sorenson به یک روش مینیممسازی اسکالر نیاز است که در اینجا از روش (GSS (Golden Section Search که در کتاب Press معرفی شده است، استفاده میشود. در انتها توابع مورد نیاز برای پیادهسازی الگوریتم Sorenson معرفی شده و تمرین کامپیوتری 13-19 حل میشود.
مدت زمان آموزش: یک ساعت
حجم فایل: 118 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس، کتاب Press1992، راهنمای پیادهسازی GSS در متلب و کد متلب
پیش نمایش جلسه هفتاد و هفتم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه هفتاد و هشتم :
در این جلسه فیلتر مجموع گوسی Gaussian Sum Filter) GSF) معرفی میشود. ابتدا الگوریتم روش GSF ارائه میشود. سپس دو دستور gsf_predict و gsf_update که به ترتیب برای مراحل بروزرسانی زمانی و اندازهگیری فیلتر GSF قابل استفاده است، معرفی میشوند. سپس با استفاده از این دستورات تمرین کامپیوتری 13-20 به طور کامل حل شده و در محیط متلب شبیهسازی میشود. در نهایت با مقایسه نتایج بدست آمده از شبیهسازی، مزایای روش GSF نسبت به EKF استاندارد بیان میشود.
مدت زمان آموزش: یک ساعت
حجم فایل: 144 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس و کدهای متلب
پیش نمایش جلسه هفتاد و هشتم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه هفتاد و نهم :
در این جلسه نحوه تخمین پارامترهای (Parameter Estimation) نامعین یک سیستم با استفاده از تخمینگرهای غیرخطی مورد بررسی قرار میگیرد. در بعضی کاربردها هدف تخمین حالت سیستم نبوده و تنها میخواهیم تعدادی پارامتر نامشخص سیستم را تخمین بزنیم. در ابتدا فلسفه بحث ارائه شده و سپس نحوه تخمین پارامتر برای سیستمهای پیوسته و گسسته تشریح میشود. در ادامه، مثال 13-4 کتاب به همراه کد متلب آن مرور شده و نتایج تحلیل میشوند. در ادامه تمرینهای کامپیوتری 13-22 و 13-23 به طور کامل حل شده و در محیط متلب شبیهسازی میشوند. ملاحظه میشود که نتایج شبیهسازی دقیقا با ملاحظات تئوریک منطبق هستند.
مدت زمان آموزش: یک ساعت و نه دقیقه
حجم فایل: 103 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس و کدهای متلب
پیش نمایش جلسه هفتاد و نهم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه هشتادم :
در این جلسه فصل چهاردهم کتاب Dan Simon که مربوط به فیلتر کالمن بدون بو Unscented Kalman Filter) UKF) است، آغاز میشود. ابتدا معایب روش EKF بیان شده و بحث تاریخی بوجود آمدن روش UKF مرور میشود. سپس نحوه تقریب میانگین و کواریانس تبدیلهای (توابع) غیرخطی بیان میشود. برای سادگی و تقریب به ذهن مثال تبدیل مختصات قطبی به کارتزین به عنوان تابع غیرخطی مورد استفاده قرار میگیرد. در نهایت میانگین و کواریانس این تبدیل غیرخطی با روش مونت کارلو در یک شکل رسم شده و مقادیر واقعی و تقریب مرتبه اول آنها باهم مقایسه میشوند.
مدت زمان آموزش: یک ساعت و هفده دقیقه
حجم فایل: 95 مگابایت
محتویات درس: فیلم با کیفیت 720p و پاورپوینت درس
پیش نمایش جلسه هشتادم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه هشتاد و یکم :
در این جلسه تبدیل بدون بو Unscented Transformation) UT) معرفی میشود. ابتدا مفهوم نقاط سیگما (Sigma Points) بیان شده و نحوه انتخاب آنها تشریح میشود. سپس میانگین و کواریانس نقاط سیگما که از یک تبدیل غیرخطی عبور کردهاند، محاسبه میشوند و با مقادیر واقعی آنها مقایسه میشوند. این مقایسه نشاندهنده برتری روش UT نسبت به خطیسازی است. در انتها مثال 14-1 کتاب به همراه کد متلب آن مرور شده و نتایج تحلیل میشوند.
مدت زمان آموزش: یک ساعت و شش دقیقه
حجم فایل: 97 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس و کد متلب
پیش نمایش جلسه هشتاد و یکم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه هشتاد و دوم :
در این جلسه فیلتر کالمن بدون بو Unscented Kalman Filter) UKF) معرفی میشود. ابتدا الگوریتم UKF گسسته بیان شده و نحوه اصلاح آن برای سیستمهای هیبریدی تشریح میشود. همچنین نحوه اعمال UKF به سیستمهای دارای نویز غیرافاین نیز بیان میشود. در ادامه مثال 14-2 کتاب (تخمین موقعیت و سرعت جسم در حال سقوط در جو زمین) که از مقاله Simon Julier در سال 2000 گرفته شده است، مرور شده و کد متلب آن اجرا میشود. برای این سیستم در فصل 13 یک فیلتر EKF هیبریدی طراحی شده بود و در اینجا عملکرد آن با UKF هیبریدی مقایسه میشود. در نهایت اثر تغییر زمان نمونهبرداری بر روی تخمین روشهای EKF و UKF مورد بررسی قرار گرفته و با شبیهسازی تحلیل میشود.
مدت زمان آموزش: یک ساعت و سیزده دقیقه
حجم فایل: 116 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس، کد متلب و مقاله Julier2000
پیش نمایش جلسه هشتاد و دوم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه هشتاد و سوم :
در این جلسه انواع دیگری از تبدیلهای بدون بو (UT) معرفی میشوند که میتوانند به فیلترهای مختلفی با ویژگیهای متفاوت منجر شوند. ابتدا UT کلی معرفی شده و الگوریتم آن ارائه میشود که UT استاندارد حالت خاصی از این UT کلی است. سپس Simplex UT معرفی میشود که با تعداد کمتر نقاط سیگما به همان مرتبه از دقت UT استاندارد میرسد. با توجه به مشکلات حل عددی Simplex UT برای سیستمهای دارای ابعاد بزرگ، UT کروی (Spherical) معرفی میشود که در عین داشتن پایداری عددی کمترین تعداد نقاط سیگما را دارد که به همان دقت UT استاندارد برسد.
تمام UT های معرفی شده میتوانند در قالب الگوریتم UKF استاندارد قرار گرفته و پیادهسازی شوند. همچنین نسخه های گسسته و هیبریدی را میتوان برای UKF استاندارد، UKF کلی (General UKF) و Simplex UKF و UKF کروی (Spherical UKF) براحتی پیادهسازی کرد. در انتها مثال 14-3 به همراه کد متلب آن مرور شده و نتایج فیلترهای EKF هیبریدی، UKF استاندارد، UKF کروی و Simplex UKF مورد مقایسه و بررسی قرار میگیرند. همچنین کد متلب آماده کتاب به گونهای توسعه داده میشود تا بتوان نتایج 4 فیلتر بالا را به صورت مونت کارلو شبیهسازی کرده و به اعداد داخل جدول موجود در کتاب برسیم.
مدت زمان آموزش: یک ساعت و یازده دقیقه
حجم فایل: 113 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس و کد متلب
پیش نمایش جلسه هشتاد و سوم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه هشتاد و چهارم :
در این جلسه نحوه پیادهسازی فیلتر UKF و هموارساز آن (UKS (Unscented Kalman Smoother با استفاده از تولباکس ekf/ukf در محیط متلب تشریح میشود. ابتدا دستورات مربوط به UKF برای سیستمهای دارای نویز جمعی شامل ukf_predict1 و ukf_update1 معرفی شده و سپس توسعه یافتههای روش UKF برای سیستمهای دارای نویز غیرافاین معرفی میشوند که دستورات مربوط به آنها شامل ukf_predict2، ukf_update2، ukf_predict3 و ukf_update3 میباشد. در ادامه دستورات متلب مربوط به هموارسازهای RTS با استفاده از UT برای سیستمهای دارای نویز افاین و غیر افاین معرفی میشوند که شامل دستورات urts_smooth1 و urts_smooth2 میباشد.
در انتها با استفاده از دستورات بالا برای سیستم ناوبری تمرین کامپیوتری 14-14 فیلتر UKF و هموارساز UKS طراحی شده و با استفاده از روش مونت کارلو، نتایج آن با نتایج روش EKF و هموارساز EKF مقایسه میشود.
مدت زمان آموزش: یک ساعت و سی و نه دقیقه
حجم فایل: 170 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس، راهنمای تولباکس ekf/ukf، تز دکترای Simo Sarkka (سال 2006)، مقاله Julier2004 و کد متلب
پیش نمایش جلسه هشتاد و چهارم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه هشتاد و پنجم :
در این جلسه UKF نوع اول و دوم الحاقی و هموارساز الحاقی با استفاه از UT برای یک سیستم غیرافاین طراحی و شبیهسازی میشود. ابتدا دستورات ukf_predict2، ukf_update2، ukf_predict3، ukf_update3 و urts_smooth2 بررسی شده و ورودیها و خروجیهای آنها بیان میشود. سپس با استفاده از آنها برای یک سیستم اسکالر دارای نویزهای فرایند و اندازهگیری غیرافاین (غیر جمعی)، UKF های نوع 2 و 3 و هموارسازهای مربوطه طراحی شده و در محیط متلب شبیهسازی میشوند. در انتها با استفاده از روش مونت کارلو، انحراف معیار تجربی همه روشها محاسبه شده و باهم مقایسه میشوند.
مدت زمان آموزش: پنجاه و شش دقیقه
حجم فایل: 93 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس و کد متلب
پیش نمایش جلسه هشتاد و پنجم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه هشتاد و ششم :
در این جلسه EKF هیبریدی بر روی سیستم تمرین کامپیوتری 14-15 پیادهسازی میشود. ابتدا دستور مورد نیاز برای پیادهسازی EKF هیبریدی (hekf_predict) معرفی شده و سپس نحوه استفاده از آن تشریح میشود. سپس یک مثال اسکالر (بدون ورودی کنترلی) با استفاده از آن حل شده و شبیهسازی ان در محیط متلب انجام میشود. در ادامه فضای حالت سیستم پاندول معکوس تمرین کامپیوتری 14-15 استخراج شده و توابع غیرخطی و ماتریس ژاکوپین با مفروضات مساله محاسبه میشوند. سپس با استفاده از دستور hekf_predict فیلتر EKF هیبریدی بر روی این سیستم پیاده شده و نتایج شبیهسازی تحلیل میشوند. لازم به ذکر است که کدهای متلب به گونهای نوشته شدهاند که با کمترین تغییرات میتوان از آنها برای سیستمهای چند ورودی چند خروجی با تعداد حالتهای دلخواه و در حضور ورودی کنترلی (یا بدون آن) استفاده کرد.
مدت زمان آموزش: یک ساعت و هفده دقیقه
حجم فایل: 118 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس و کد متلب
پیش نمایش جلسه هشتاد و ششم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه هشتاد و هفتم :
در این جلسه UKF هیبریدی بر روی سیستم تمرین کامپیوتری 14-15 پیادهسازی میشود. ابتدا دستورات مورد نیاز برای پیادهسازی UKF هیبریدی (hut_transform و hukf_predict) معرفی شده و سپس نحوه استفاده از آنها تشریح میشود. در ادامه UKF هیبریدی با استفاده از این دستورات بر روی سیستم تمرین کامپیوتری 14-15 اعمال شده و نتایج آن با روش EKF هیبریدی مقایسه و تحلیل میشود. لازم به ذکر است که کدهای متلب به گونهای نوشته شدهاند که با کمترین تغییرات میتوان از آنها برای سیستمهای چند ورودی چند خروجی با تعداد حالتهای دلخواه و در حضور ورودی کنترلی (یا بدون آن) استفاده کرد.
توجه: در کد hukf_predict باید به جای ماتریس کواریانس نویز فرایند پیوسته Q، مقدار معادل گسسته آن T*Q جاگذاری شود. در کد آپلود شده در سایت این اشتباه اصلاح شده و فقط داخل فیلم این اشتباه وجود دارد.
مدت زمان آموزش: یک ساعت و هفت دقیقه
حجم فایل: 106 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس و کد متلب
پیش نمایش جلسه هشتاد و هفتم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه هشتاد و هشتم :
در این جلسه تخمین دوگانه یا Dual Estimation که به تخمین همزمان حالتها و پارامترهای سیستم میپردازد، مورد بررسی قرار میگیرد. در جلسه 79 تخمین پارامتر با استفاده از EKF بحث شد و در اینجا تخمین دوگانه با استفاده از UKF مورد بحث قرار میگیرد. ابتدا الگوریتمهای تعیین کواریانس مربوط به دینامیک پارامترهای سیستم از کتاب Van der Merwe بیان شده و سپس برای شبیهسازی مثال جرم و فنر از کتاب انتخاب میشود. در انتها از دو روش EKF و UKF هیبریدی برای تخمین دوگانه (حالت و پارامتر) سیستم جرم و فنر استفاده کرده و نتایج شبیهسازی تحلیل و مقایسه میشوند.
مدت زمان آموزش: یک ساعت و چهل دقیقه
حجم فایل: 181 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس، کتاب Van der Merwe و کد متلب
پیش نمایش جلسه هشتاد و هشتم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه هشتاد و نهم :
در این جلسه ابتدا UKF پیوسته یا (UKBF (Unscented Kalman Bucy Filter از مقاله 2007 Simo Sarkka معرفی شده و الگوریتم آن تشریح میشود. سپس UKBF به سیستم فرود فضاپیما در جو زمین اعمال شده و نحوه تعریف توابع اندازهگیری و سیستم نیز تشریح میشود. لازم به ذکر است که این سیستم در چندین مقاله معتبر (از جمله مقاله 2007 Simo Sarkka) و همچنین در راهنمای تولباکس ekf/ukf مورد بررسی قرار گرفته است. در مقاله 2007 فیلتر UKF هیبریدی و در تولباکس UKF گسسته برای این سیستم پیاده سازی شده است. در این جلسه ابتدا UKBF بر روی این سیستم پیاده شده و نتایج تحلیل میشوند. در نهایت با استفاده از دستور hukf_predict (جلسه 87) ، UKF هیبریدی نیز به سیستم اعمال شده و نتایج شبیهسازی تحلیل میشوند. در انتها نحوه گسستهسازی سیستمهای غیرخطی (مورد استفاده در تولباکس) تشریح میشود.
مدت زمان آموزش: یک ساعت و سی دقیقه
حجم فایل: 225 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس، مقالات مورد اشاره و کدهای متلب
پیش نمایش جلسه هشتاد و نهم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه نودم:
در این جلسه فصل 15 کتاب که به فیلتر ذرهای یا Particle Filter اختصاص دارد، آغاز میشود. در ابتدای جلسه تفاوتهای بین فیلتر کالمن و فیلتر ذرهای بیان شده و مقایسهای بین PF از یک طرف و EKF و UKF از طرف دیگر انجام میشود. در ادامه تخمین حالت بیزین (Bayesian State Estimation) معرفی شده و الگوریتم آن ارائه میشود. سپس فیلتر ذرهای به عنوان یک روش حل مساله تخمین حالت بیزین مطرح شده و معادلات آن استخراج میشود. در انتها الگوریتم فیلتر ذرهای ارائه شده و نحوه تولید ذرات بیان میشود.
مدت زمان آموزش: یک ساعت و شانزده دقیقه
حجم فایل: 94 مگابایت
محتویات درس: فیلم با کیفیت 720p و پاورپوینت درس
پیش نمایش جلسه نودم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه نود و یکم :
در این جلسه نحوه پیادهسازی فیلتر ذرهای در متلب توضیح داده میشود. ابتدا مثال 15-1 به همراه کد متلب آن مرور میشود. سپس دستور PF معرفی میشود که با استفاده از آن برای هر سیستم غیرخطی گسسته با ابعاد دلخواه (با فرض نویزهای گوسی) میتوان فیلتر ذرهای را پیادهسازی نمود. در ادامه با استفاده از دستور PF مثال 15-1 دوباره حل شده و به نتایج مشابه کتاب میرسیم. در انتها تمرین کامپیوتری 15-15 با استفاده از همین دستور حل شده و شبیهسازی مونت کارلو برای حالتهای مختلف انجام شده و نتایج تحلیل میشوند.
توجه: در سطر 41 کد Example_15_1، باید به جای (X = f_fun(repmat(x0,1,N),W,1 باید از X = repmat(x0,1,N)+W استفاده شود.
مدت زمان آموزش: یک ساعت و شانزده دقیقه
حجم فایل: 124 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس و کدهای متلب
پیش نمایش جلسه نود و یکم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه نود و دوم :
در ابتدای این جلسه مساله فقر نمونهها (Sample Impoverishment) یا سیاهچاله (Black Hole) فیلتر ذرهای تعریف شده و برخی از روشهای جلوگیری از آن عنوان میشود. سپس روشهای Roughening و Prior Editing به عنوان دو تا از این راه حل ها، معرفی میشوند. در ادامه مثال 15-2 کتاب به همراه کد متلب آن مرور میشود. برای پیادهسازی راحتتر روش Roughening تابع RoughPF معرفی میشود که میتواند مساله تخمین حالت را برای سیستمهای هیبریدی و با استفاده از فیلتر ذرهای دارای الگوریتم Roughening حل کند. در نهایت با استفاده از دستور RoughPF حالتهای مثال 15-2 در محیط متلب تخمین زده شده و نتایج فیلترهای EKF و UKF هیبریدی با فیلتر ذرهای (با الگوریتم Roughening) مقایسه و تحلیل میشوند.
مدت زمان آموزش: یک ساعت و شانزده دقیقه
حجم فایل: 119 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس و کدهای متلب
پیش نمایش جلسه نود و دوم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه نود و سوم :
در این جلسه یکی دیگر از روشهای بهبود عملکرد PF استاندارد به نام Regularized PF مورد بررسی قرار میگیرد که میتواند برای جلوگیری از فقر نمونهها استفاده شود. ابتدا مفاهیم ابر کره واحد (Unit Hypersphere) و چگالی هسته (Kernel Density) بیان شده و سپس نحوه تقریب pdf با استفاده از این مفاهیم بیان میشود. همچنین هسته اپانچنیکف (Epanechnikov) به عنوان یک هسته بهینه معرفی میشود. در ادامه الگوریتم فیلتر ذرهای RPF ارائه شده و مثال 15-3 کتاب به همراه کد متلب آن مرور میشود.
مدت زمان آموزش: یک ساعت و نه دقیقه
حجم فایل: 121 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس و کد متلب
پیش نمایش جلسه نود و سوم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه نود و چهارم :
در ابتدای این جلسه تمرینات کامپیوتری 15-11، 15-12، 15-13 و 15-14 به طور کامل حل شده و در متلب شبیهسازی میشوند. سپس روش MCMC یاMarkov Chain Monte Carlo برای جلوگیری از فقر دادهها معرفی میشود. در ادامه روش APF یا Auxiliary PF برای حل مشکل ذرات پرت (Outliers) که در غیرخطیگیرهای شدید اتفاق میافتد، معرفی میشود. در نهایت مثال 15-4 به همراه کد متلب آن مرور شده و نتایج تحلیل میشود.
مدت زمان آموزش: یک ساعت و دوازده دقیقه
حجم فایل: 128 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس و کدهای متلب
پیش نمایش جلسه نود و چهارم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه نود و پنجم :
در این جلسه فیلتر EKPF یا Extended Kalman Particle Filter معرفی میشود که در واقع ترکیب فیلترهای PF و EKF است. ابتدا نحوه ترکیب این فیلترها بیان شده و در ادامه الگوریتم فیلتر EKPF ارائه میشود. سپس مثال 15-5 به همراه کد متلب آن مرور شده و نتایج شبیهسازی تحلیلی میشوند. در انتها شباهتها و تفاوتهای فیلترهای EKF، UKF و PF و همچنین مزایا و معایب هر کدام جمعبندی میشوند.
مدت زمان آموزش: یک ساعت و دو دقیقه
حجم فایل: 101 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس و کد متلب
پیش نمایش جلسه نود و پنجم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه نود و ششم :
در این جلسه نحوه پیادهسازی فیلترهای HPF و HEKPF در متلب بیان میشود. ابتدا دو دستور (تابع) HPF و HEKPF برای پیادهسازی فیلترهای ذرهای و فیلتر ذرهای ترکیب شده با EKF (هر دو به صورت هیبریدی) معرفی شده و ورودی و خروجیهای آنها معرفی میشوند. همچنین نحوه تعریف توابع سیستم، اندازهگیری و همینطور ماتریسهای ژاکوبین معادلات سیستم و اندازهگیری تشریح میشود. سپس با استفاده از این توابع، حالتهای یک پاندول تخمین زده میشود. در انتها اثر تغییر تعداد ذرات، نحوه تولید likelihood، زمان نمونهبرداری، گام زمانی شبیهسازی و ضریب اصطکاک پاندول بر روی تخمین هر دو روش بررسی شده و نتایج تحلیل میشوند.
مدت زمان آموزش: یک ساعت و بیست و یک دقیقه
حجم فایل: 161 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس و کدهای متلب
پیش نمایش جلسه نود و ششم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه نود و هفتم :
در این جلسه مباحث مقدماتی و ریاضی فیلتر CKF یا Cubature Kalman Filter مطرح میشوند. ابتدا مراجع اصلی مباحث معرفی شده و مخترعان این روش مختصرا معرفی میشوند. سپس فیلتر بیزین در حالت کلی معرفی شده و حالت خاص فیلتر بیزین برای نویزهای گوسی بررسی میشود. در ادامه روشهای مختلف حل مساله فیلتر بیزین بحث شده و از هر کدام مثالهایی بیان میشود. در انتها ایده کلی CKF بیان شده و علت نامگذاری فیلتر به نام CKF تشریح میشود.
مدت زمان آموزش: یک ساعت و هشت دقیقه
حجم فایل: 101 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس و مراجع اصلی
پیش نمایش جلسه نود و هفتم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه نود و هشتم :
در ابتدای این جلسه، روشهای مختلف حل عددی انتگرالها شامل روشهای ضربی و غیرضربی معرفی شده و مزایا و معایب هر کدام به طور مختصر بحث میشود. سپس روش مکعبی (Cubature rule) برای حل عددی انتگرالها معرفی میشود که دارای مزایایی نسبت به روشهای قبلی است. برای حل انتگرالهای موجود در فیلتر بیزین، ابتدا انتگرالهای کارتزین به انتگرالهای کروی-شعاعی (Spherical-radial) تبدیل شده و سپس از یک قانون کروی شعاعی درجه 3 برای حل آنها استفاده میشود. در انتها الگوریتم مراحل بروزرسانی زمانی و اندازهگیری فیلتر CKF با استفاده از نقاط مکعبی ارائه میشود.
مدت زمان آموزش: یک ساعت و چهل دقیقه
حجم فایل: 145 مگابایت
محتویات درس: فیلم با کیفیت 720p و پاورپوینت درس
پیش نمایش جلسه نود و هشتم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه نود و نهم:
در این جلسه نحوه پیادهسازی فیلتر CKF گسسته و هموارساز آن CRTS در محیط متلب و با استفاده از تولباکس ekf/ukf آموزش داده میشود. ابتدا شباهتها و تفاوتهای فیلتر CKF و UKF توضیح داده شده و مزایا و معایب هر کدام تشریح میشود. سپس دستورات مورد نیاز برای پیادهسازی مراحل بروزرسانی زمانی (ckf_predict) و بروزرسانی اندازهگیری (ckf_update) معرفی شده و نحوه استفاده از آنها برای پیادهسازی فیلتر CKF بیان میشود. در ادامه دستور crts_smooth که برای پیادهسازی هموارساز مکعبی یا Cubature RTS )CRTS) استفاده میشود، معرفی شده و ورودیها و خروجیهای آن توصیف میشوند. در انتها با استفاده از دستورات بالا، برای سیستم ردیابی هدف (Target Tracking) که در مقاله 2009 Ienkaran مطرح شده، فیلتر CKF و هموارساز آن CRTS طراحی شده و در محیط متلب پیادهسازی میشود.
مدت زمان آموزش: یک ساعت و سی وپنج دقیقه
حجم فایل: 179 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس، مراجع اشاره شده و کدهای متلب
پیش نمایش جلسه نود و نهم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه صدم :
در این جلسه نحوه پیادهسازی فیلتر CKF هیبریدی در محیط متلب آموزش داده میشود. ابتدا دستور hckf_predict جهت پیادهسازی مرحله بروزرسانی زمانی فیلتر CKF هیبریدی یا HCKF معرفی شده و ورودیها و خروجیهای آن تشریح میشود. سپس نحوه اضافه کردن آن به مسیر پیش فرض متلب بیان میشود. در انتها با استفاده از این دستور، یک فیلتر HCKF برای سیستم شناور مغناطیسی (Magnetic Levitation) طراحی شده و در محیط متلب شبیهسازی میشود. در این شبیهسازی، هم حالت فیدبک حالت و هم حالت فیدبک خروجی (با استفاده از تخمینهای HCKF) بررسی شده و فیلتر HCKF با کنترلکننده مقاوم H بینهایت ترکیب میشود. همچنین اثر تغییر زمان نمونهبرداری، شرایط اولیه تخمین و کواریانس و ورودی مرجع بررسی میشود.
توجه: در کد hckf_predict باید به جای ماتریس کواریانس نویز فرایند پیوسته Q، مقدار معادل گسسته آن T*Q جاگذاری شود. در کد آپلود شده در سایت این اشتباه اصلاح شده و فقط داخل فیلم این اشتباه وجود دارد.
مدت زمان آموزش: یک ساعت و چهارده دقیقه
حجم فایل: 138 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس، مقالات و کدهای متلب
پیش نمایش جلسه صدم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه صد و یکم :
در این جلسه فیلتر کالمن گوس هرمیت (GHKF (Gauss-Hermite Kalman Filter و هموارساز آن (GHRTS (Gauss-Hermite Rauch-Tung-Striebel معرفی میشوند. ابتدا نحوه حل انتگرالهای موجود در مساله فیلترینگ بیزین با استفاده از چندجملهایهای متعامد هرمیت (Hermite Polynomials) تشریح شده و روش ضربی مورد استفاده در دامنه چندبعدی تشریح میشود. سپس الگوریتم فیلتر GHKF و هموارساز آن GHRTS ارائه شده و دستورات مربوطه در تولباکس ekf/ukf معرفی میشوند. توابع ghkf_predict و ghkf_update به ترتیب برای مراحل بروزرسانی زمانی و اندازهگیری فیلتر GHKF و همچنین تابع ghrts_smooth برای پیادهسازی هموارساز GHRTS مورد استفاده قرار میگیرند. در انتها مساله تخمین سرعت و موقعیت یک شی متحرک با استفاده از اندازهگیری های زاویه توسط دو سنسور (Bearing Only Tracking) حل شده و نتایج فیلتر GHKF و هموارساز GHRTS مقایسه میشوند. این مساله، یکی از مثالهای حل شده در راهنمای تولباکس ekf/ukf بوده و کدهای متلب آن در تولباکس موجود است.
مدت زمان آموزش: یک ساعت و بیست و نه دقیقه
حجم فایل: 161 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس، مقالات و کدهای متلب
پیش نمایش جلسه صد و یکم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه صد و دوم :
در این جلسه نحوه پیادهسازی فیلتر GHKF هیبریدی در محیط متلب آموزش داده میشود. ابتدا دستور hghkf_predict جهت پیادهسازی مرحله بروزرسانی زمانی فیلتر GHKF هیبریدی یا HGHKF معرفی شده و ورودیها و خروجیهای آن تشریح میشود. سپس نحوه اضافه کردن آن به مسیر پیش فرض متلب بیان میشود. در انتها با استفاده از این دستور، یک فیلتر HGHKF برای سیستم شناور مغناطیسی (Magnetic Levitation) طراحی شده و در محیط متلب شبیهسازی میشود. در این شبیهسازی، هم فیدبک حالت و هم فیدبک خروجی (با استفاده از تخمینهای HGHKF) بررسی شده و فیلتر HGHKF با کنترلکننده مقاوم H بینهایت ترکیب میشود. همچنین اثر تغییر زمان نمونهبرداری، شرایط اولیه تخمین و کواریانس و ورودی مرجع بررسی میشود.
توجه: در کد hghkf_predict باید به جای ماتریس کواریانس نویز فرایند پیوسته Q، مقدار معادل گسسته آن T*Q جاگذاری شود. در کد آپلود شده در سایت این اشتباه اصلاح شده و فقط داخل فیلم این اشتباه وجود دارد.
مدت زمان آموزش: یک ساعت و شش دقیقه
حجم فایل: 133 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس، مقالات و کدهای متلب
پیش نمایش جلسه صد و دوم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه صد و سوم :
در این جلسه فیلتر کالمن تفاضل مرکزی یا (CDKF (Central Difference Kalman Filter معرفی میشود. ابتدا فرمول درونیابی چندجملهای مرتبه دوم استرلینگ (Sterling’s Second Order Polynomial Interpolation) برای تقریب توابع غیرخطی تشریح میشود. سپس با استفاده از این فرمول، نحوه تقریب میانگین و کواریانس نقاط عبور داده شده از یک تابع غیرخطی بیان میشود. همچنین برای مساله تبدیل مختصات قطبی به کارتزین دقت این روش، با روشهای خطیسازی و تبدیل بدون بو (UT) مقایسه شده و نتایج تحلیل میشوند. در انتها الگوریتم فیلتر گسسته CDKF برای نویزهای جمعی ارائه میشود.
مدت زمان آموزش: یک ساعت و ده دقیقه
حجم فایل: 131 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس، مقالات و تز دکترای Van der Merwe 2004
پیش نمایش جلسه صد و سوم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه صد و چهارم :
در این جلسه نحوه پیادهسازی فیلتر CDKF گسسته در محیط متلب آموزش داده میشود. ابتدا دستورات cdkf_predict و cdkf_update به ترتیب برای پیادهسازی مراحل بروزرسانی زمانی و اندازهگیری فیلتر CDKF گسسته معرفی شده و ورودیها و خروجیهای آنها تشریح میشوند. سپس با استفاده از این دستورات، حالتهای سیستم ردیابی هدف (Target Tracking) که در جلسه 99 معرفی شد، تخمین زده شده و فیلتر CDKF در محیط متلب پیادهسازی میشود. در انتها، با رسم تخمینها، خطاهای تخمین و همچنین مسیر واقعی با مسیر تخمین زده شده مقایسه شده و نتایج تحلیل میشوند.
مدت زمان آموزش: یک ساعت و شش دقیقه
حجم فایل: 127 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس، مقالات و کدهای متلب
پیش نمایش جلسه صد و چهارم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه صد و پنجم :
در این جلسه نحوه پیادهسازی فیلتر CDKF هیبریدی در محیط متلب آموزش داده میشود. ابتدا دستور hcdkf_predict جهت پیادهسازی مرحله بروزرسانی زمانی فیلتر CDKF هیبریدی یا HCDKF معرفی شده و ورودیها و خروجیهای آن تشریح میشود. سپس نحوه اضافه کردن آن به مسیر پیش فرض متلب بیان میشود. در انتها با استفاده از این دستور، یک فیلتر HCDKF برای یک پاندول معکوس یک درجه آزادی طراحی شده و در محیط متلب شبیهسازی میشود. در این شبیهسازی، هم حالت فیدبک حالت و هم حالت فیدبک خروجی (با استفاده از تخمینهای HCDKF) بررسی شده و فیلتر HCDKF با کنترلکننده بهینه LQR ترکیب میشود. دینامیک و کنترلکنندههای استفاده شده از وبسایت CTMS گرفته شده است. همچنین اثر تغییر زمان نمونهبرداری، شرایط اولیه تخمین و کواریانس و ورودی مرجع بررسی میشود.
توجه: در کد hcdkf_predict باید به جای ماتریس کواریانس نویز فرایند پیوسته Q، مقدار معادل گسسته آن T*Q جاگذاری شود. در کد آپلود شده در سایت این اشتباه اصلاح شده و فقط داخل فیلم این اشتباه وجود دارد.
مدت زمان آموزش: یک ساعت و سه دقیقه
حجم فایل: 131 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس و کدهای متلب
پیش نمایش جلسه صد و پنجم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه صد و ششم :
در این جلسه فیلتر IMM یا Interacting Multiple Model معرفی میشود. این فیلتر برای تخمین حالت و مود فعال سیستمهای سویچینگ مارکوف (Markovian Switching Systems) قابل استفاده است. ابتدا الگوریتم فیلتر IMM ارائه میشود. سپس دستورات imm_predict و imm_update که به ترتیب برای پیادهسازی مراحل بروزرسانی زمانی و اندازهگیری فیلتر IMM به کار میروند، معرفی شده و نحوه استفاده از آنها تشریح میشود. سپس مثال ردیابی هدف (Target Tracking) که در راهنمای تولباکس ekf/ukf ارائه شده است، مرور میشود. در این مثال، سیستم ردیابی به صورت یک سیستم سویچینگ مارکوف مدل شده و توسط دستورات فوق در محیط متلب پیاده شده و مود فعال و حالتهای آن تخمین زده میشوند.
مدت زمان آموزش: یک ساعت و بیست و شش دقیقه
حجم فایل: 149 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس، فصل 11 کتاب Bar-Shalom و کدهای متلب
پیش نمایش جلسه صد و ششم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه صد و هفتم:
در این جلسه توسعهیافته های فیلتر IMM برای سیستمهای غیرخطی و هموارسازهای آنها از جمله IMM-EKF و IMM-UKF معرفی میشوند. ابتدا دستورات eimm_predict و eimm_update که به ترتیب برای بروزرسانی زمانی و اندازهگیری فیلتر IMM-EKF استفاده میشوند، معرفی میشوند. همچنین دستور eimm_smooth که برای هموارسازی فیلتر IMM-EKF مورد استفاده قرار میگیرد، معرفی میشود. سپس دستورات uimm_predict و uimm_update که به ترتیب برای بروزرسانی زمانی و اندازهگیری فیلتر IMM-UKF استفاده میشوند، معرفی میشوند. همچنین دستور uimm_smooth که برای هموارسازی فیلتر IMM-UKF مورد استفاده قرار میگیرد، معرفی میشود.
در ادامه یک سیستم سویچینگ ردیابی هدف (Target Tracking) شامل دو مدل (CPWV (Continuous Process Wiener Velocity و (CTM (Coordinated Turn Model معرفی شده و فیلترهای IMM-EKF و IMM-UKF به همراه هموارسازشان به آنها اعمال شده و نتایج تحلیل میشود. در انتها سیستم قبلی با اندازهگیری های غیرخطی (BOT (Bearings Only Tracking از 4 سنسور در نظر گرفته شده و فیلترهای مورد اشاره دوباره به آن اعمال شده و نتایج تحلیل میشوند. لازم به ذکر است که کدهای تمام این شبیهسازیها داخل تولباکس ekf/ukf موجود بوده و با نصب تولباکس همه این کدها قابل اجراست.
مدت زمان آموزش: یک ساعت و هفده دقیقه
حجم فایل: 141 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس، راهنمای تولباکس ekf/ukf و کدهای متلب
پیش نمایش جلسه صد و هفتم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
جلسه صد و هشتم :

در این جلس نحوه استفاده از فیلترهای غیرخطی برای کنترل تطبیقی سیستمهای غیرخطی در قالب یک مثال تشریح میشود. ابتدا مدل سیستم شناور مغناطیسی (Magnetic Levitation) به طور خلاصه معرفی شده و یک کنترلکننده فیدبک خطیساز برای آن معرفی میشود. در این سیستم فرض میشود که جرم شناور متغیر با زمان بوده و باید علاوه بر حالتها، جرم شناور نیز تقریب زده شود. با توجه به مباحث مطرح شده در جلسه 88 (تخمین دوگانه)، مدل الحاقی سیستم تشکیل شده و واریانس نویز فرایند مربوط به جرم از روش رابینز-مونرو محاسبه میشود. سپس کنترلکننده معرفی شده با فیلترهای HEKF، HUKF، HCKF، HGHKF و HCDKF ترکیب شده و برای کنترل تطبیقی شناور مغناطیسی مورد استفاده قرار میگیرند. عملکرد فیلترهای مختلف برای سه حالت مختلف مقایسه شدهاند: فیدبک حالت (State Feedback)، فیدبک حالت تطبیقی (Adaptive State Feedback) و فیدبک خروجی تطبیقی (Adaptive Output Feedback). همچنین اثر پارامترهای مختلف مانند زمان نمونهبرداری، پارامتر روش رابینز-مونرو و پروفایل تغییر جرم شناور بر روی عملکرد فیلترهای مختلف بررسی شده و ریشه میانگین خطای تخمین (Root Mean Square Error) باهم مقایسه میشوند.
مدت زمان آموزش: یک ساعت و سی و چهار دقیقه
حجم فایل: 175 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس، مقاله Sinha2004 و کدهای متلب
پیش نمایش جلسه صد و هشتم:
تمام پیش نمایشها دارای کیفیت 720p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
با نگهداشتن نشانگر بر روی گزینه در نوار پایین صفحه نمایش، میتوانید کیفیت دلخواه را انتخاب کنید
 مرجع مهندسی كنترل | دانش با کیفیت در مرز علم
مرجع مهندسی كنترل | دانش با کیفیت در مرز علم
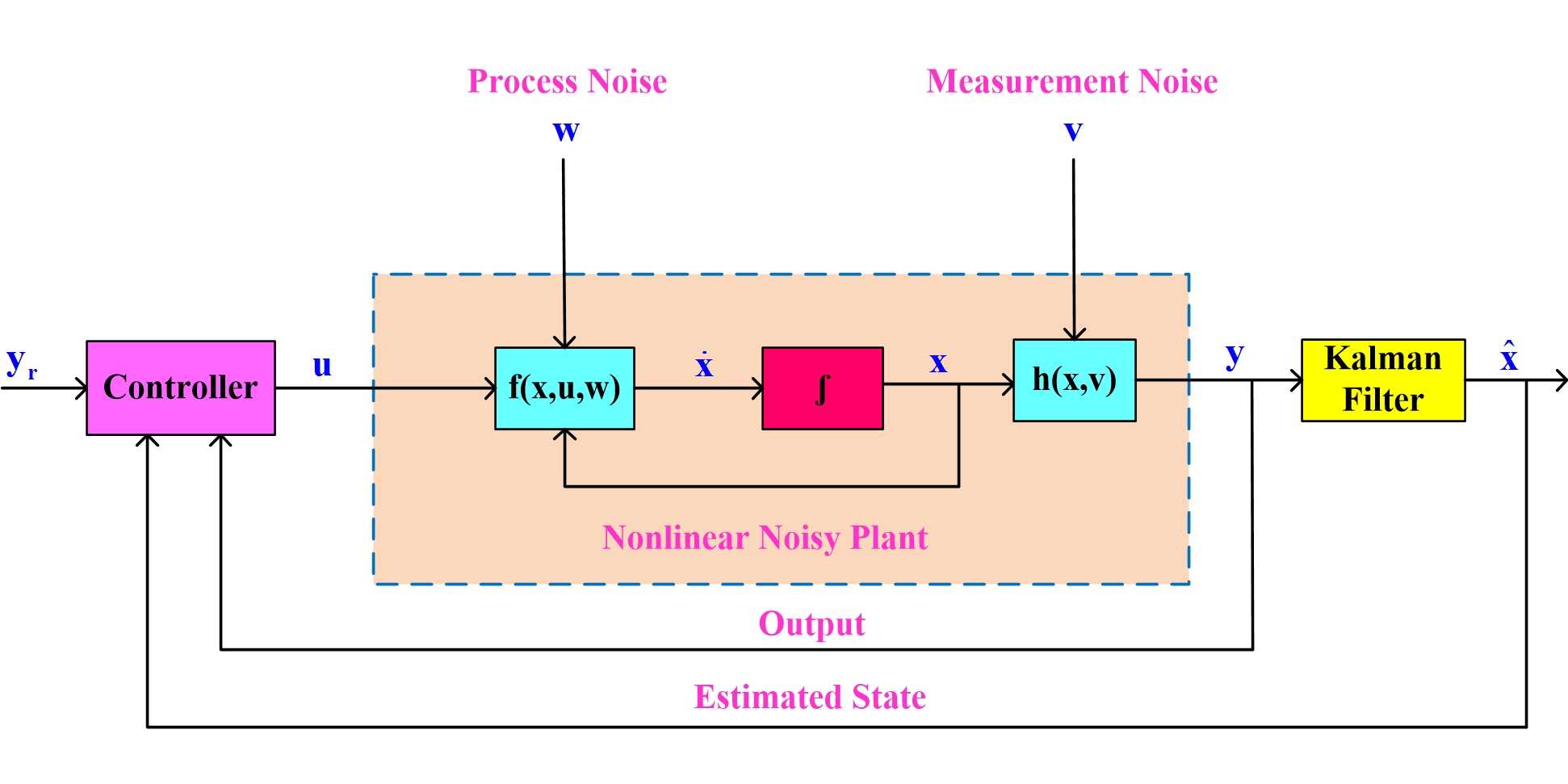


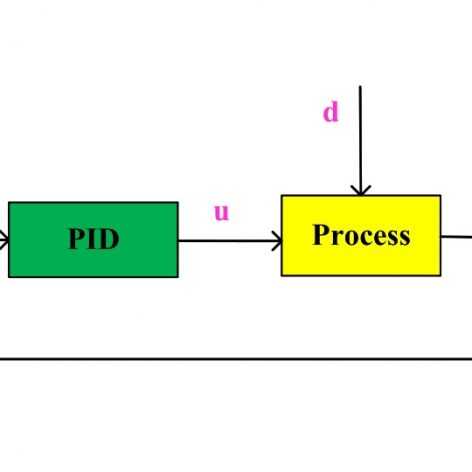


پیام
با سلام. ممنونم بابت اموزش خوبتان. من تا فصل 8 آموزش شما را خرید کرده ام.
من برای یک پلنت خطی پیوسته که ناپایدار است (یک ورودی و دو خروجی و چهار متغییر حالت) یک فیلتر کالمن طراحی کرده ام ( با نویز فرایند و اندازه گیری نا همبسته) . تا ثانیه 9 پایدار از و بعد هر چهار متغییر حالت واقعی پلنت به سمت بی نهایت میل میکند و تخمینها نیز این مقادیر واقعی را دنبال میکند. دلیلش چیست که هر چهار متغییر حالت واقعی پلنت بعد از 9 ثانیه به سمت بی نهایت میل میکند در صورتی که اصلا ورودی کنترلی به سیستم نداده ام . مشکل در چیست و باید چکارش کنم؟
( ورودی کنترلی در پلنت من وجود ندارد. صفر در نظر گرفته ام)
( ماتریس Q را 4*4 و ماتریس R را 2*2 و هر دو را قطری در نظر گرفته ام که تمامی درایه های روی قطر اصلی را یک گرفته ام)
( ماتریس P در حالت اولیه را (eye(4 و حالت اولیه تمامی متغییرهای حالت را صفر در نظر گرفته ام)
با تشکر
علی جوادی
@پیام,
سلام
خوب وقتی سیستم ناپایدار باشه طبیعتا بعد یه مدت حالتها به سمت بینهایت میل می کنند مگر اینکه یک ورودی کنترلی مناسب اعمال بشه تا سیستم رو پایدار کنه.
البته حتی اگه سیستم ناپایدار هم باشه تخمین انجام میشه ولی خوب حالتها به سمت بینهایت میل می کنند و تخمینها هم تعقیبش می کنند (به سمت بینهایت میل میکنند)
زهرا
ممنون از پاسختون.
ممنون میشم راهنماییم بفرمایید. من در تعریف مساله ام مشکل دارمو کمی گیج شدم!!! که اصلا از فیلتر کالمن باید استفاده کنم یا نه!! (با توجه به توضیحات ابتدایی جلسه 14)
x’=Ax+Bu+Gw
A B G ماتریس های ثابت
x حالات قابل اندازه گیری
u ورودی قابل اندازه گیری
w اغتشاش غیر قابل اندازه گیری
درواقع حالت ها رو میتونم اندازه بگیرم و احتیاجی به تخمین حالات نیست. مشکلم اغتشاشات غ ق اندازه گیریه.
راه حل این مشکل فیلتر کالمنه؟ این که اغتشاشات غ ق اندازه گیریو جز حالات سیستم در نظر بگیرم و در واقع اغتشاشات رو تخمین بزنم؟ یا روش دیگه ای هست؟
کدوم جلسه کمک کننده اس؟ جلسات 14 به بعد ؟
سپاس از لطفتون.
علی جوادی
@زهرا,
شما باید هدفتون رو مشخص کنید که آیا می خواهید اغتشاش رو تخمین بزنید یا اثر اغتشاش رو بر روی عملکرد سیستم کاهش بدید؟ معمولا تخمین اغتشاش به تنهایی هدف نیست و در نهایت هدف کاهش اثر اغتشاش نامعلومه.
اگر هدف فقط تخمین اغتشاش باشه، باید از روشهای رویت اغتشاش (disturbance observer) استفاده کنید. برای اطلاعات بیشتر در این زمینه با مدیر سایت (که تخصصش همین موضوعه) صحبت کنید.
اما اگر هدفتون کاهش اثر اغتشاش باشه، من تو یه سری فیلم جداگانه کنترل مقاوم این نوع سیستمها رو مفصل بررسی کردم که از ابزار LMI استفاده میکنه. این سری فیلمها رو میتونید تو آدرس زیر ببینید:
https://www.controlref.com/robust-h-infinity
ساسان
با سلام
می خواستم از فیلتر کالمن در هیدرلوژی در تز دکترام استفاده کنم استادی برای مشاوره در این زمینه می شناسید که معرفی کنید.
علی جوادی
@ساسان,
سلام
دکتر بیژن معاونی در دانشکده راه آهن دانشگاه علم و صنعت ایران
زهرا
سلام. مرسی از اموزشتون عالی.
یه سوال داشتم. من برای یه سیستم میتونم همزمان از کنترلر پیش بین و فیلتر کالمن استفاده کنم؟ کدوم جلسه از اموزش به من میتونه کمک کنه؟ چون وقت کافی برای یادگیری همه ندارم.
سپاس
علی جوادی
@زهرا,
با سلام و تشکر از لطف شما
شما فیلتر کالمن رو میتونید با هر کنترل کننده ای استفاده کنید ولی باید توجه داشته باشید که تضمینی برای پایداری سیستم در اینصورت وجود نداره به جز حالتهای خاص مثل سیستمهای خطی. برای اطلاعات بیشتر در این مورد به جلسه اول (حدودا دقیقه 60) مراجعه کنید.
برای مثالی از این حالت که کنترل کننده غیرخطی با چند توع فیلتر کالمن مختلف کوپل شده به جلسه 108 مراجعه کنید. مشابه کاری که تو این جلسه شده میتونید کنترل کننده های دیگه (از جمله پیش بین) رو هم با انواع تخمینگرها (از جمله کالمن) ترکیب کنید
پیام
با سلام
اگر مدل سیستم در محیط سیمولینک در متلب فانکشن انجام شود آیا گسسته است یا پیوسته؟
من میخاهم برای پلنتم که خطی است از فیلتر کالمن به عنوان رویتگرم استفاده کنم و سیستمم را درون متلب فانکشن به صورت فضای حالت نوشته ام. خواستم بدانم نوشتن مدل در محیط سیمولینک و در متلب فانکشن باعث میشود سیستم گسسته شود ؟
علی جوادی
@پیام,
سلام
همونطور که از اسمش پیداست، متلب فانکشن فقط برای ساختن یه تابع در محیط سیمولینک کاربرد داره و سیستم رو تعریف نمیکنه. برای تعریف سیستم باید علاوه بر تعریف توابع، انتگرالگیر (برای سیستمهای پیوسته) یا بلوک تاخیر واحد (برای سیستمهای گسسته) استفاده بشه
حسین
با سلام و خسته نباشید،
در جلسات آموزشی در مورد Ensemble Kalman Filter هم توضیحاتی داده شده؟
علی جوادی
@حسین,
سلام
خیر. در مورد ENKF در این سری فیلمها چیزی گفته نشده
پیام
با سلام . توی اموزش شما فیلتر کالمن تکمیلی تدریس شده ؟
کدوم قسمته؟
واسه تلفیق داده های شتاب سنج و ژایروسکوپ و بدست اوردن زاویه خواستم
علی جوادی
@پیام,
سلام
قسمت فیلتر کالمن تکمیلی گفته شده ولی مربوط به تلفیق داده های سنسورها نیست. در بخش تکمیلی فیلترهای مهمی که داخل کتاب Dan Simon وجود نداره گفته شدند که شامل جلسات 97 تا 108 میشه.
برای تلفیق شما از هر فیلتر غیرخطی میتونید استفاده کنید از جمله EKF، UKF و فیلترهایی که در بخش تکمیلی گفته شدند.
برای اطلاعات بیشتر به توضیحات هر درس مراجعه کنید
ساسان
با سلام
اگر یک یا چند معادله اندازه گیری بر روی پارامترها داشته باشیم چطور باید همزمان با معادله اندازه گیری حالت بر روی فیلتر کالمن اعمال کنیم؟؟؟
علی جوادی
@ساسان,
سلام
سوال خیلی نامفهمومه. آیا منظورتون اینه که علاوه بر حالت چطور میشه پارامتر رو هم تخمین زد؟ یا اینکه پارامترها رو با یه نویزی اندازهگیری کردید و می خواهید که اونها رو تخمین بزنید؟
لطفا سوال رو کامل بپرسید
ساسان
@علی جوادی,
بله مورد دوم پارامتر هم با نویز اندازه گیری کردیم و می خواهیم اونا رو هم تخمین بزنیم علاوه بر اندازه گیری حالت
علی جوادی
@ساسان,
کافیه پارامترها رو به بردار حالت اضافه کنید. اسم این روش تخمین دوگانه هستش که در جلسه 88 مفصل بررسی شده
ساسان
@علی جوادی,
در جلسه 88 اندازه گیری ما توی حالت بود بعد می خواستیم پارامتر رو هم علاوه بر حالت،تخمین بزنیم ولی اگر ما بخواهیم علاوه بر حالت،اندازه گیری پارامتر رو هم اضافه کنیم پس شبیه همونه تشکر
علی جوادی
@ساسان,
بله دقیقا
یاسر
سلام،
خیلی ممنون از مجموعه فوق العاده شما،
فیلم راهنما رو هم دیدم ولی متوجه نشدم، که مباحث تیونینگ فیلتر کالمن رو کجا و چجوری گفتین؟ یعنی مباحث و روش های مربوط به انتخاب ماتریس های Q و R و….
علی جوادی
@یاسر,
با سلام و تشکر از لطف شما
من متوجه نشدم منظورتون تعیین ماتریسهای Q و R دقیقا تو چه روشی هستش؟ معمولا برای فیلتر کالمن کواریانس و تخمین اولیه جزو پارامترهای تنظیم هستند که مفصل توضیح دادم. سوالتون رو دقیقتر بپرسید (کدوم جلسه و کدوم روش)
پیام
با سلام
اگر با استفاده از انتگرالگیری از دادههای ژیروسکوپ میشه زاویه رو محاسبه کرد و مشکلش اینه که بعد یه مدت (به خاطر نویز و خطاهای مختلف) دریفت به وجود میاد و خطای افزایشی ایجاد میشه. بنابراین از دادههای سنسورهای دیگه مثل شتاب سنج هم استفاده میشه تا این خطا به وجود نیاد.
خواستم بدونم از داده های شتاب سنج ما چه استفاده ای میکنیم؟ از داده های ژیروسکوپ میشه زاویه رو محاسبه کرد، از داده های شتابسنج چه استفاده ای میتوان کرد؟ عملیات خاصی روی داده های ان باید انجام دهیم؟
با تشکر
علی جوادی
@پیام,
اولا که مستقیما از داده ها استفاده نمیشه ولی میتونه کمک کنه چون همیشه میتونه جهت جاذبه زمین رو به ما نشون بده (حداقل زوایای رول و پیچ رو خیلی کمک میکنه). برای اطلاعات بیشتر به کتابهای ناوبری مراجعه کنید