 مرجع مهندسی كنترل | دانش با کیفیت در مرز علم
مرجع مهندسی كنترل | دانش با کیفیت در مرز علم
شبیه سازی مقاله ژورنال (Elsevier (Applied soft computing سال 2011
Adaptive fuzzy sliding mode control using supervisory fuzzy control
for 3 DOF planar robot manipulators
شبیه سازی بازوی ربات 3 لینکه مسطح با استفاده از کنترلر فازی اسلایدینگ تطبیقی
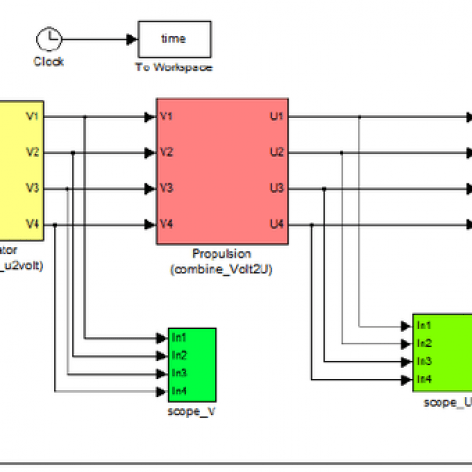
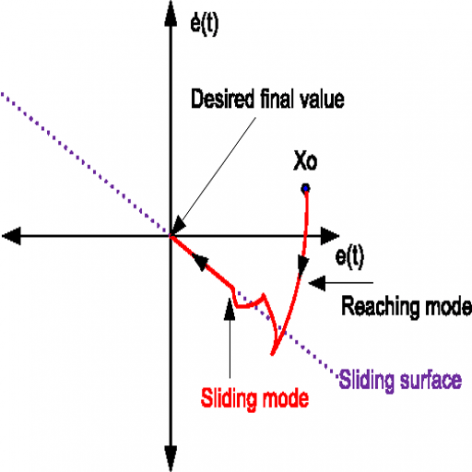
- در این مقاله، مسئله با تطبیق سازی یک کنترل مد لغزشی فازی تطبیقی، AFSMC، با یک سطح لغزشی PID برطرف شده است. برای این روش پیشنهاد شده، از یک کنترل منطق فازی جهت تولید سیگنال کنترل ضربهای استفاده می شود. علاوه برآن، گین خروجی کنترل مد لغزشی فازی، FSMC، توسط یک سیستم فازی نظارتی بصورت روی خط تنظیم میشود تا از chattering جلوگیری کند. کنترلر به کار گرفته شده در این مقاله از سه قسمت تشکیل شده است.در بخش اول کنترل کننده مد لغزشی، در بخش دوم کنترل کننده فازی و در بخش سوم کنترل کننده فازی تطبیقی به سیستم اضافه می شود و معادلات دینامیکی سیستم را تحت کنترل خود در می اورد.این مقاله به طور کامل در دو بخش جداگانه شبیه سازی شده است و تمامی اشکال موجود در مقاله استخراج شده اند. قبل از اجرای برنامه های متلب، ضروری است که فایل توضیحات به طور کامل مطالعه شود.
- فایل های همراه: فایل PDF مقاله، فایل Word توضیحات راهنمای استفاده از کدهای متلب، فایل Word شامل ترجمه کامل و توضیحات مقاله در 28 صفحه ، فایل های Simulink متلب
- کلمات کلیدی: کنترل کننده مد لغزشی، کنترل کننده فازی، کنترل کننده تطبیقی ، بازوی ربات ، رباتیک ،مقالات شبیه سازی شده، مهندسی برق
راهنمای خرید:
- لینک دانلود فایل بلافاصله بعد از پرداخت وجه به نمایش در خواهد آمد.
- همچنین لینک دانلود به ایمیل شما ارسال خواهد شد به همین دلیل ایمیل خود را به دقت وارد نمایید.
- ممکن است ایمیل ارسالی به پوشه اسپم یا Bulk ایمیل شما ارسال شده باشد.
- در صورتی که به هر دلیلی موفق به دانلود فایل مورد نظر نشدید با ما تماس بگیرید.







علیرضا
سلام آقای مهندس
سوالی داشتم خدمتون : یک سیستم دارم مرتبه 8که LPV می باشد و می خواهم با LMI region آن را پایدار کنم ولی متاسفانه هرکاری می کنم نه فیزیبل می شود و نه پایدار، پیشنهادی برام دارید یا کسی که توی این کار خبره باشد رو معرفی کنید. لطفا به ایمیلم پاسخ بدید . با تشکر…
مهندس بابایی
سلام بر شما
مدرس این بخش خانم هستند. در زمینه مورد نظر شما کار نکرده ام. می توانید با مدیریت سایت مطرح نمایید تا شما را راهنمایی نمایند.
موفق باشید.
الهام
سلام شبیه سازی با سیمولینکه یا کد نویسی؟
مهندس بابایی
با سلام
شبیه سازی ها بر اساس سیمولینک می باشد.
شقایق
با سلام.من فایل رو خریداری کردم ولی وقتی فایل رو ران میکنم، میره تو حالت compiling و متلب قفل میکنه و دیگه نمیشه کاری کرد و مجبور میشم restartکنم کامپیوتر رو.
با تشکر
مهندس بابایی
با سلام
فایل ها چندین بار تست شدند و مشکلی ندارند و به راحتی ران می شوند. سعی کنید با متلب ۲۰۱۷ و یا ۲۰۱۸ فایل ها رو باز کنید شاید مشکل شما برطرف شود.
علی
بله من میخوام تاثیر روش کنترلی بکار گرفته شده رو با وجود اغتشاشاتی که توی این پیپر اشاره شده مشاهده کنم. آیا لازمه که در شبیه سازی، فرمول اغتشاشات رو بصورت مستقیم در معادله اویلر لاگرانژ که در ام فایل نوشته شده وارد کنم؟
مهندس بابایی
با سلام
بله، ابتدا اغتشاش رو با یک دامنه و فرکانس پایین تر به سیستم وارد کنید و بعد کم کم شروع به افزایش فرکانس و دامنه کنید و ببینید نهایتا تا چه فرکانسی پاسخ های شما مطلوب خواهد بود که همان رو به عنوان فرکانس اغتشاش ورودی به سیستم فاینال کنید.
موفق باشید.
علی
سلام خانم مهندس
توی مقاله برای شبیه سازی ، مدل نامعینی و مدل اغتشاش رو در نظر گرفته. توی این شبیه سازی که شما لطف فرمودید و انجام دادید شما این مدل ها رو درنظر نگرفتید و اگر گرفتید من متوجه نمیشم چطور
اگه ممکنه توضیح بفرمایید. ممنون از زحمات شما
مهندس بابایی
باسلام
ببینید دوست عزیز، کار duplicate کردن یک مقاله مخصوصا در حوزه کاربردهای صنعتی مانند فیلد رباتیک کارپیچیده ای هست.چراکه اکثر نویسندگان تمایل ندارند که تمام جزییات و پارامترها و ترفندهایی که در شبیه سازی استفاده کردند را در متن مقاله عنوان کنند که مخاطبین به راحتی توانایی شبیه سازی کامل ان را داشته باشند. در این مقاله نیز نویسندگان اگرچه در روابط تیوری خود بحث نامعینی ها و اغتشاش را عنوان نمودند و درستی به کارگیری ان را در اثبات پایداری نشان داده اند اما شبیه سازی های ارایه شده در مقاله با شزط dt=0 انجام شده است.اما اگر تمایل دارید که از ترکیب این مقاله با کار جدید خود استفاده نمایید پیشنهاد می کنم در ورود اغتشاش به سیستم نهایی خود، از دامنه و فرکانس کمتر از انچه که در این مقاله ذکر شده است استفاده نمایید.
موفق باشید.
علی
سلام
مشکل بنده با متلب نسخه 2018 برطرف شد و کلیه فایل ها بدون ایراد اجرا شدند. ممنون
مهندس بابایی
با سلام
بسیارعالی.
موفق باشید.
علی
import و export فایل fis رو انجام میدم و حتی فایل سیمولینک اول یعنی smc هم اجرا میشه و جواب میده ولی الباقی تا روشون دبل کلیک میکنم ارور مربوط به ورژن که گفتم خدمتتون رو میده. ورژن 2016 ندارم ولی فردا روی ورژن 2018 امتحان میکنم
مهندس بابایی
بسیارخوب، امیدوارم مشکل شما برطرف شود.
علی
سلام خانم مهندس
ببینید من در قسمت Tracking control فایل سیمولینک smc رو میتونم اجرا کنم و مشکلی ندارم و همه نمودار ها رو میبینم ولی بقیه فایل های سیمولینک اجرا نمیشن و اروری که میده راجب ورژن سیمولینک هستش. در قسمت Pick and place task که اصلا هیچکدام اجرا نمیشن. ورژن متلب من 2017 هست.
ارور مشابه اینه : model…….was created with a newer version 9 of simulink
مهندس بابایی
با سلام
من الان مجددا هر 6 فایل سیمولینک رو چک کردم. هر 6 تا باز می شوند ، اجرا میشوند و خروجی می دهند. فایل های سیمولینک مشکلی ندارند. اتفاقا متلب من هم ورژن 2017b هستش که فایل ها راحت run می شوند. export و import فایل های .fis را انجام میدید بعد error میده یا کلا تا باز می کنید error میده؟ حالا شما سعی کنید با ورژن 2016 هم امتحان کنید ببینید باز هم برای شما error میده یا خیر.
علی
import و export فایل های دارای پسوند fis. را در fuzzy tools چطور انجام بدم؟
مهندس بابایی
با سلام
ببینید دوست عزیز ، همانطور که قبلا هم خدمت شما عرض شد، در بخش مقالات شبیه سازی شده ما فقط فایل شبیه سازی کامل را در اختیار دانشجویان قرار می دهیم و اموزشی بابت این موضوع نداریم. چون فرض بر ان است که دوستان بر مباحث مقالات تسلط دارند اما فرصت کافی برای شبیه سازی مقالات را ندارند و همانظور که می بینید با هزینه ای بسیار پاییین تر از سایت های مشابه این شبیه سازی ها در اختیار دوستان قرار گرفته تا اکثر دوستان دانشجو توان خرید را داشته باشند. اگر اموزشی هم در کنار این شبیه سازی ها قرار گیرد قطعا هزینه ان بسیار بالا خواهد رفت.
برای اینکه کار شما راه بیافتد می توانم به صورت زیر شما را راهنمایی کنم:
1- وارد نرم افزار متلب شوید.
2- از قسمت APPs یا Aplications بخش مربوط به Fuzzy Logic Designer را پیدا کنید.
3-از قسمت File , کار export و import را انجام دهید تا فایل های fis. در workspace دخیره شوند.
4- سپس برنامه را run کنید تا fuzzy rules ها را ببینید.
موفق باشید.
علی
سلام
اگه میشه راجب اجرای فایل ها بیشتر توضیح بدید من با اجرای اونها مشکل دارم متاسفانه
مهندس بابایی
با سلام
این مقاله ای که شبیه سازی شده و در اختیار شما قرار داده شده است، از پیچیده ترین مقالات در حوزه رباتیک محسوب می شود که جهت پیاده سازی ان ، شما می بایست به 3 درس اصلی و مهم کارشناسی ارشد برق کنترل ، شامل کنترل غیرخطی، کنترل فازی و کنترل تطبیقی و تولباکس های ان در نرم افزار متلب تسلط داشته باشید. فرض بر ان است که دوستانی که به دنبال چنین مقاله پیچیده ای هستند حداقل از تسلط نسبی بر روی موضوع ان برخوردار هستند.اگر import و export فایل های دارای پسوند fis. را در fuzzy tools به درستی انجام دهید و بعد سیمولینک ها را run کنید، پس از ان در هر مرحله با کلیک بر روی هر oscop ، خروجی ها را خواهید یافت. با این وجود فایل توضیحاتی که همراه شبیه سازی ها قرار داده شده است، شما را در اجرای صحیح برنامه هدایت می کند.
موفق باشید.