این پست مربوط به جلسات مجموعه آموزشی مدلسازی و شبیه سازی 6 درجه آزادی هواپیما است. اصطلاح انگلیسی این عبارت 6DOF Aircraft Modeling and Simulation است. انجام تمامی روند، از مدلسازی و استخراج معادلات 6 درجه آزادی تا شبیه سازی و حل معادلات دیفرانسل غیرخطی این سیستم در نرم افزار متلب Matlab و سیمولینک simulink در این مجموعه با جرئیات شرح داده شده است.
در انجام پروژه ها، معمولاً سیستم یا مدلی انتخاب می شود تا به منظور طراحی کنترلر از آن استفاده شده و کنترلری بر روی آن اعمال نمود. در اغلب پروژه ها خصوصاً پروژه های کنترلی، این سیستم یک هواپیما فرض می شود. اما پیش از انجام هر کار لازم است دینامیک سیستم و رفتار متغیرهای آن بررسی و مورد ارزیابی قرار گرفته و از صحت مدل اطمینان حاصل نمود. بنابراین پس از استخراج معادلات، باید به اعتبارسنجی و صحت سنجی آن با روش های مختلف پرداخته و با منطق و ریاضیات و نیز مراجع موجود مقایسه شود که این موارد نیز در این سری از آموزش ها ارائه شده است.
جلسه اول:
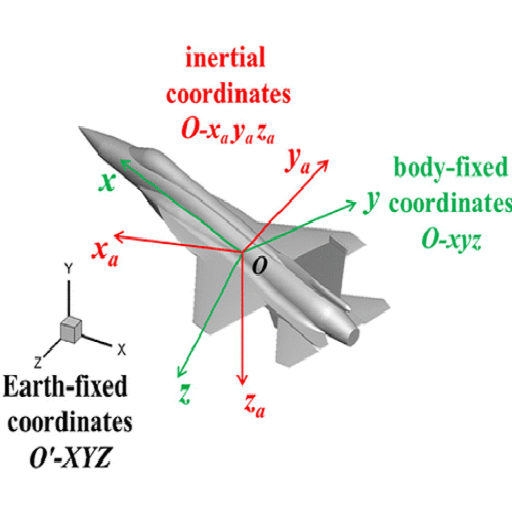
در این جلسه که اولین جلسه از “مجموعه آموزشی مدلسازی و شبیه سازی 6 درجه آزادی هواپیما” بوده، به توضیحات مقدماتی درباره ی مفاهیم ریاضی در مدلسازی، تعریف قاب و دستگاه مختصات و ماتریس های تبدیلِ دستگاه های مختصات پرداخته شده است.
علاوه بر این تعاریف که جزء ابزارهای لازم برای مدلسازی بوده، به تعریف زوایای اویلر نیز اشاره می شود. سپس فرضیات درنظر گرفته برای مدلسازی شرح داده شده و به بیان ورودی های کنترلی، متغیرهای سیستم و خروجی های معادلات پرداخته شده است. در ادامه، به منظور تدوین معادلات حرکت هواپیما، از قوانین نیوتون و اویلر استفاده کرده و با کمک تعاریف ارائه شده از قاب و دستگاه، به استخراج معادلات دیفرانسیل مربوط به سرعت های خطی بدنی و سرعت های زاویه ای بدنی پرداخته شده است. این معادلات شامل معادلات دیفرانسیل مربوط به مؤلفه های نیرو و گشتاورها در سه راستای x و y و z هستند.
مدت زمان: 1 ساعت
محتوا: فایل تصویری و پاورپوینت درس
پیش نمایش جلسه اول:
جلسه دوم:
در این جلسه که دومین جلسه از “مجموعه آموزشی مدلسازی و شبیه سازی 6 درجه آزادی هواپیما” بوده، به استخراج معادلات سینماتیک هواپیما پرداخته شده است.
در این قسمت، با تعریف ماتریس تبدیل بین دستگاه بدنی و اینرسی که تحت تبدیل زوایای اویلر به دست آمده، معادلات موقعیت های مکانی هواپیما در سه راستای x و y و z به دست می آید. سپس به ارتباط بین نرخ چرخش دستگاه مختصات اینرسی و بدنی پرداخته شده است و یک مجموعه معادلات دیفرانسیل برای سرعت های زاویه ای بدنی به دست می آید. بنابراین با توجه به 6 معادله ی نیرو و گشتاور که در جلسه قبل استخراج شده بود (معادلات نیوتون و اویلر)، مجموعه معادلات دیفرانسیلی کاملی به دست آمده که از آن می توان برای شبیه سازی استفاده نمود. در ادامه به توضیح پرواز مستقیم الخط پرداخته، نیروها و گشتاورها را در این حالت به دست آورده و در نهایت معادلات کاملی از پرواز حالت دائم Steady Rectilinear Flight به دست می آید که در جلسه بعد شبیه سازی آن انجام خواهد شد.
مدت زمان: 1 ساعت
محتوا: فایل تصویری و پاورپوینت درس
پیش نمایش جلسه دوم:
جلسه سوم:
در این جلسه که سومین جلسه از “مجموعه آموزشی مدلسازی و شبیه سازی 6 درجه آزادی هواپیما” بوده، ابتدا به تعریف شرایط تریم می پردازیم.
سپس به بازنویسی معادلات دیفرانسیل کلی هواپیما برای شرایط پرواز حالت دائم Steady State Flight پرداخته می شود که در آن نرخ تغییرات مؤلفه های سرعت خطی بدنی و مؤلفه های سرعت زاویه ای بدنی صفر هستند. در ادامه حرکت مستقیم الخط که یکی از مانورهای پرواز حالت دائم Steady State Flight بوده بررسی و توضیح داده می شود. در این شرایط پروازی، علاوه بر صفر بودن نرخ تغییرات سرعت خطی و بدنی، تغییرات زوایای اویلر و نیز سرعت های زاویه ای بدنی صفر هستند. با این شرایط تنها سرعت خطی بدنی و موقعیت های اینرسی آن از اهمیت برخوردار بوده و به نحوی، با صفر قرار دادن هر یک از مؤلفه های مربوط به نیروها و گشتاورها به حل معادلات پرداخته می شود. در این معادلات فرض می شود مشخصات جرمی و هندسی، پارامترهای ارتفاع، سرعت پرواز و نیز ضرایب ایرودینامیکی معلوم بوده و ورودی های کنترلی (زاویه الویتور، ایلرون و رادر)، زاویه حمله و زاویه لغزش و نیز تراست موتور، مجهولات معادلات هستند.
مدت زمان: 1 ساعت
محتوا: فایل تصویری، پاورپوینت درس، کدهای متلب
پیش نمایش جلسه سوم:
شکل مربوط به توضیح گذاشتن قدرمطلق برای زوایا در ادامه آمده است.
عکس اول
عکس دوم
جلسه چهارم:
در این جلسه که چهارمین جلسه از “مجموعه آموزشی مدلسازی و شبیه سازی 6 درجه آزادی هواپیما” بوده، ابتدا فرضیات معادلات حرکت هواپیما، متغیرهای حالت سیستم و ورودی و خروجی های آن مشخص می شوند.
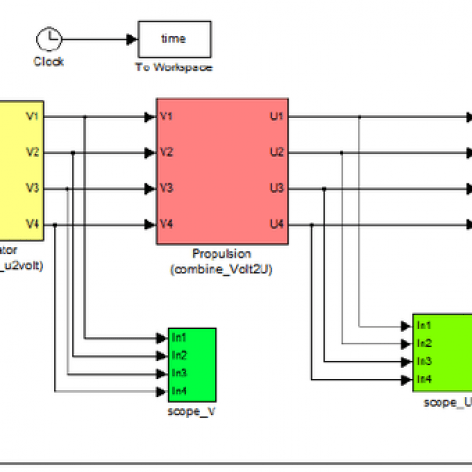
سپس طرح کلی نوشتن معادلات در سیمولینک ارائه می شود. سیمولینک مربوط به معادلات دارای بخش های مربوط به نیروها و گشتاورهای وزنی، نیروها و گشتاورهای ایرودینامیکی و نیز نیروها و گشتاورهای مربوط به موتور هستند. در انتها، تمامی این نیروها و گشتاورها برای معادلات نیوتون و اویلر استفاده خواهد شد. علاوه بر این معادلات (معادلات دیفرانسیل مربوط به سرعت های خطی و سرعت های زاویه ای)، معادلات مربوط به نرخ تغییر زوایای اویلر و نیز معادلات دیفرانسیل موقعیت های اینرسی نیز در بلوک مربوط به معادلات غیرخطی اضافه می شوند. در این جلسه تنها به استخراج معادلات مربوط به بخش نیروها و گشتاورهای وزنی و ایرودینامیکی پرداخته می شود. همچنین نکات لازم در نحوه نوشتن معادلات و دستگاه های مربوط به آن ها نیز با جزئیات شرح داده می شود.
مدت زمان: 1 ساعت و 15 دقیقه
محتوا: فایل تصویری، پاورپوینت درس، کدهای متلب
پیش نمایش جلسه چهارم:
جلسه پنجم:
در این جلسه که پنجمین جلسه از “مجموعه آموزشی مدلسازی و شبیه سازی 6 درجه آزادی هواپیما” بوده، به ادامه مدلسازی و شبیه سازی پرداخته شده است.
در این جلسه به تکمیل همه معادلات دیفرانسیل که شامل معادلات نیوتون، اویلر، معادلات مربوط به نرخ تغییرات زوایای اویلر و معادلات موقعیت های اینرسی هستند، پرداخته شده است. بدین منظور در سیمولینک موردنظر این معادلات بازنویسی خواهد شد. در ادامه، به شبیه سازی و صحت سنجی مدلسازی و شبیه سازی پرداخته خواهد شد. سناریوهای مورد نظر برای این کار، شبیه سازی در شرایط تریم و غیر تریم و نیز شبیه سازی با اضافه نمودن ضربه به ورودی الویتور صورت می گیرد. مشاهده می شود که در شرایط تریم همه متغیرها بر روی مقدار تریم باقی می ماند و در دو شرایط دیگر، متغیرها پس از مدتی اغتشاش، به مقدار تریم بازخواهند گشت.
مدت زمان: 50 دقیقه
محتوا: فایل تصویری، پاورپوینت درس، کدهای متلب
پیش نمایش جلسه پنجم:
جلسه ششم:
در این جلسه که ششمین جلسه از “مجموعه آموزشی مدلسازی و شبیه سازی 6 درجه آزادی هواپیما” بوده، ابتدا به توضیح پرواز اغتشاشی پرداخته شده است.
سپس به کمک نظریه اختلالات کوچک، خطی سازی معادلات غیرخطی (با تعریف فرضیات ساده کننده) انجام می شود. سپس به مقایسه این معادلات با معادلات پرواز دائم پرداخته می شود. همچنین نیروها و گشتاورها و نیز ضرایب و مشتقات ایرودینامیکی در این حالت (Perturbed) با شرایط Steady State مقایسه شده و توضیح داده می شود. در ادامه با استفاده از دستورهای موجود در نرم افزار MATLAB به خطی سازی معادلات غیرخطی (کد سیمولینک استخراج شده در جلسات قبل)، دکوپله کردن معادلات، به دست آوردن ریشه های معادله مشخصه ی هر کانال (طولی و عرضی-سمتی)، استخراج توابع تبدیل و نیز به دست آوردن صفرها و قطب های توابع تبدیل خواهیم پرداخت.
مدت زمان: 1 ساعت و 10 دقیقه
محتوا: فایل تصویری، پاورپوینت درس، کدهای متلب
پیش نمایش جلسه ششم:
جلسه هفتم:
در این جلسه که هفتمین جلسه از “مجموعه آموزشی مدلسازی و شبیه سازی 6 درجه آزادی هواپیما” بوده، به ادامه مباحث مدلسازی پرداخته شده است.
مباحث تکمیلی شامل مدل کردن تغییرات ضرایب ایرودینامیکی بر حسب متغیرهای مختلف از جمله ارتفاع و زاویه حمله، مدل کردن موتور و گشتاورهای ناشی از فاصله آن تا مرکز جرم و نیز مدلسازی روتور و اجزای گردنده در موتور است. همچنین به نحوه ی مدلسازی و شبیه سازی دو مورد در MATLAB و توضیحات آن پرداخته شده است.
مدت زمان: 50 دقیقه
محتوا: فایل تصویری، پاورپوینت درس، کدهای متلب
پیش نمایش جلسه هفتم :
مطالعه بیشتر
 مرجع مهندسی كنترل | دانش با کیفیت در مرز علم
مرجع مهندسی كنترل | دانش با کیفیت در مرز علم



{kind=link}
{kind=link}
esmaeil
با عرض سلام و خسته نباشید.
در رابطه با این سیستم میتوان از کنترل PN استفاده کرد؟
اگر بله در رابطه با این موضوع نیاز به یک فیلم آموزشی دارم. چطور میتونم درخواست بدم و آیا شما فرصت تهیه آن را دارید؟
با تشکر
مهندس رشیدی
سلام
روش PN جزء روشهای هدایت بوده و درخوب مجموعه های آموزشی سایت موجود است.
مهندس رشیدی
سلام
روش PN جزء روشهای هدایت بوده و در مجموعه های آموزشی سایت موجود است.
اسماعیل
@مهندس رشیدی,
با عرض سلام مجدد.
واقعیتش مجموعه اموزشی PN رو دانلود کردم ولی جدای از این که کیفیت ارائه خوب نبود، جزییات کار هم بیان نشده بود. با توجه به این که سایت تدریس خصوصی هم انجام میده ، اگر شما به موضوع هدایت PN تسلط دارین، یک جلسه اموزشی بعنوان کلاس خصوصی قرار بدین و بنده مشکلی با پرداخت هزینه مطابق با ساعت خصوصی این کلاس ندارم.
همچنین از شما بابات این مجموعه اموزشی کمال تشکر را دارم. پیروز و سربلند باشین.
اسماعیل
@اسماعیل,
لازم به ذکر هست که من روش PN رو برای هدایت هواپیمای با 6 درجه ازادی نیاز دارم که شما در مجموعه اموزشیتون مدل کردین.
با تشکر
اسماعیل
@اسماعیل,
با سلام.
بنده منتظر پاسخ شما هستم. ممنون میشم که به بنده اطلاع دهید که میتونین این بخش رو تدریس کنین یا نه؟
با تشکر
مدیر سایتادمین سایت ( مالک تایید شده )
@اسماعیل,
سلام قبلا پاسخ دادم تشکر
مدیر سایتادمین سایت ( مالک تایید شده )
@اسماعیل,
من فقط هدایت موشک کار کردم و در زمینه هدایت هواپیما اطلاعاتی ندارم.
مدیر سایتادمین سایت ( مالک تایید شده )
@اسماعیل,
سلام حق با شماست. این آموزش رو به فردی تدریس میکردم. بین دو گزینه که این رو در اختیار عموم قرار بدم یا نه یکی رو انتخاب کردم. اما حالا که شما از کیفیت راضی نیستید این مجموعه رو به زودی از روی سایت حذف میکنم
با تشکر
حامد
سلام. در مورد دستور fsolve، علامت @ که قبل از ورودی اول(تعریف تابع) میاد، علتش چیه؟ انگار تو Help گفته شده واسه توابع غیر خطیه؟(اگه درست متوجه شده باشم!) معادلات ما که غیر خطی نیست؟! درست میگم؟
مهندس رشیدی
دستور fsolve برای حل دستگاه معادلات جیری استفاده می شود و طبق help متلب، برای معادلات غیرخطی استفاده می شود.
دو تا از مجهولات معادلات، T و alpha هستند. با توجه به تعریف معادله غیرخطی (ناهمگن بودن و جمع پذیر نبودن)، دو عبارت زیر غیرخطی هستند که در معادلا ما نیز مشاهده می شود.
سینوس یک زاویه و ضرب دو مجهول نیز عباراتی غیرخطی را حاصل می دهند.
sin(alpha)
T*sin(alpha)
حامد
سلام. یه سوال داشتم. تعبیر فیزیکی این که از زاویه حمله و زاویه دیفلکت سطح کنترلی تو کدی که نوشتین(Myfunc جلسه سوم؛ جهت بدست آوردن ضریب درگ) چیه؟ من متوجه نشدم!
حامد
ببخشید، منظورم گرفتن قدر مطلق(از زوایا) بود که تو سوال قبلی جا انداختم.
مهندس رشیدی
سلام
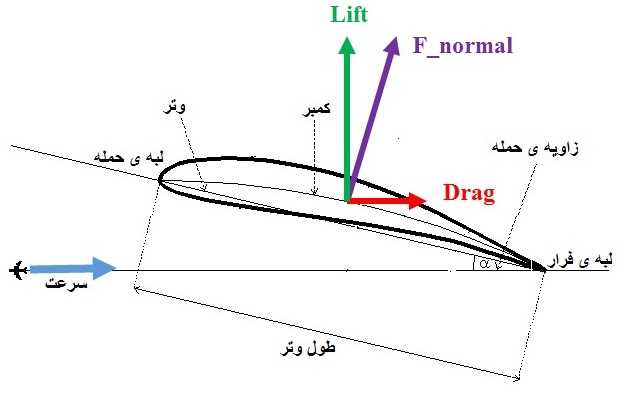
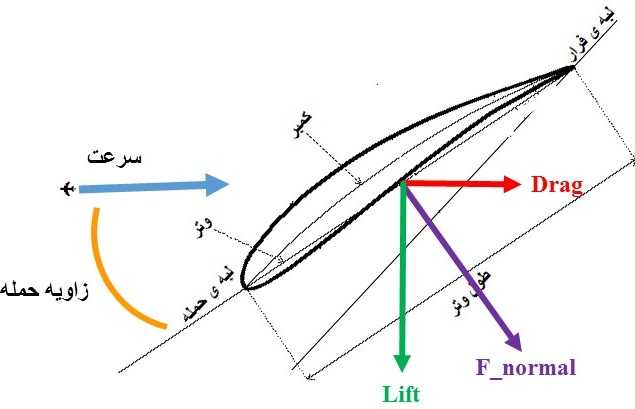
همان طور که در این جلسه نیز عرض شد، نیروی پسا همان نیروی مقاومت هوا بوده و همواره در خلاف جهت حرکت پرنده است. پس همواره به سمت عقب بوده و منفی است.
برای مثال: اگر زاویه حمله مثبت باشد (مثلا دماغه هواپیما به سمت بالا باشد)، نیروی برآ مثبت می شود اما اگر زاویه حمله منفی باشد، این نیرو منفی و در جهت پایین خواهد شد. اما در هر دو حالت نیروی پسا درجهت عقب (خلاف جهت x و خلاف سرعت پرنده) است.
همه این توضیحات برای هر المان با شکل ایرفویل مانند الویتور نیز صادق است.
با توجه به اینکه ضرب دو مقدار باید مقداری مثبت دهد (که منفی آن در معادلات ظاهر شود) از abs برای زوایا (در صورت منفی بودن) استفاده شده است.
همچنین لازم به ذکر است که نیروی پسا در راستای سرعت و نیروی برآ در راستای عمود بر سرعت پروازی است.
توضیح این مورد به صورت عکس در ادامه جلسه سوم نشان داده شده است.
مهندس رشیدی
پاسخ داده شد.
مهندس رشیدی
سلام
همان طور که در این جلسه نیز عرض شد، نیروی پسا همان نیروی مقاومت هوا بوده و همواره در خلاف جهت حرکت پرنده است. پس همواره به سمت عقب بوده و منفی است.
برای مثال: اگر زاویه حمله مثبت باشد (مثلا دماغه هواپیما به سمت بالا باشد)، نیروی برآ مثبت می شود اما اگر زاویه حمله منفی باشد، این نیرو منفی و در جهت پایین خواهد شد. اما در هر دو حالت نیروی پسا درجهت عقب (خلاف جهت x و خلاف سرعت پرنده) است.
همه این توضیحات برای هر المان با شکل ایرفویل مانند الویتور نیز صادق است.
با توجه به اینکه ضرب دو مقدار باید مقداری مثبت دهد (که منفی آن در معادلات ظاهر شود) از abs برای زوایا (در صورت منفی بودن) استفاده شده است.
همچنین لازم به ذکر است که نیروی پسا در راستای سرعت و نیروی برآ در راستای عمود بر سرعت پروازی است.
توضیح این مورد به صورت عکس در ادامه جلسه سوم نشان داده شده است.
صابر
سلام
موضوع پایان نامه من کنترل اشباع مدل 6 درجه آزادی یک وسیله خودران هواییه
این مطالب آموزشی به درد من میخوره؟
مهندس رشیدی
با سلام
بحث ارائه شده مربوط به مدلسازی و شبیه سازی هواپیما و هر وسیله پرنده مانند هواپیمای بدون سرنشین یا UAV است. در حال حاضر مباحث کنترلی مطرح نشده است (در صورت پیشنهاد یا لزوم آن، ارائه خواهد شد) اما برای شناخت کامل از دینامیک سیستم و مدلسازی آن بسیار کاربردی است. چراکه پیش از هر طراحی کنترلری ابتدا نیاز است دینامیک سیستم را مدل کنید و از صحت آن اطمینان حاصل نمایید. با توجه به تجربه ی بنده، چنانچه دینامیک سیستم هواپیما یا وسایل پرنده باشد، این مطالب مفید خواهد بود.
صابر
@مهندس رشیدی,
سپاس
مباحث کنترلی آن را هم ارایه کنید عالی میشه
مهندس رشیدی
خواهش می کنم.
چشم، در فرصت های آتی…
مهندس رشیدی
بله، چشم.
در فرصت های آتی…
حامد
سلام مجدد. بخش اول رو دانلود کردم و مفید بود. ممنون.
بخش دوم رو هم دانلود کردم. اما بخش دوم همون بخش اوله! انگار اشتباه آپلود کردین.
لطفا لینک فایل بخش دوم رو در اختیارم قرار بدین.
سپاس
مهندس رشیدی
@حامد,
سلام
خواهش می کنم.
اصلاح شد.
حامد
سلام. بخش اول رو دانلود کردم. پسورد میخواد. چیه پسوردش؟
مدیر سایتادمین سایت ( مالک تایید شده )
@حامد,
سلام
AC_MS_1
عذرخواهی میکنم بابت این قضیه
حامد
خواهش میکنم. موفق باشید.
آهور
کانال تلگرام راجع به همین آموزش ،چون من به سوالاتی برخورد کردم که هنوز جواب نگرفتم بیش از دو ساله که رو این موضوع کار میکنم (به صورت خود آموز)
مهندس رشیدی
@آهور,
اگر فرمایشی هست یا سؤالی بود، همین جا بفرمایید تا دوستان دیگر هم استفاده کنند.
اگر پاسخ سؤالات کوتاه بود همین جا پاسخگو و در خدمتتان هستم.
اگر هم نکاتی باقی مانده بود که در جلسات مطرح نشده بود، بنده جلسه یا جلسات تکمیلی هم در سایت قرار میدهم.
آهور
با شکر از پاسخ شما ، مشکل اینجاست که با افزایش سرعت و شتاب ضرایب درگ و جرم افزوده دائما در حال تغییرند ، علاوه بر آن معادلات به هم وابسته اند و غیر خطی اند
اگر امکانش هست علاوه بر خطی سازی به صورت غیر خطی هم حل شوند
این مبحث خیلی جالب وآموزنده است اگه امکانش هست کانال تلگرامی برای تبادل نظرایجاد بشه
بسیار متشکرم
مهندس رشیدی
@آهور,
خواهش میکنم
درمورد جرم افزوده، به بالزن ها مرتبط میشود و درمورد بال ثابت ها لحاظ نمی شود.
درمورد معادلات هم، تمامی معادلات و استخراج آن ها به صورت کاملا غیرخطی بوده و شبیه سازی نیز غیر خطی است. در انتها هم به خطی سازی معادلات پرداخته تا بتوان از تئوری های کنترل خطی نیز بهتره گرفت.
کانال تلگرام در رابطه با چه موضوعی؟
آهور
ضرایب معادلات حاکم بر سیستم متغیر در نظر گرفته می شوند یا ثابت ؟؟ از کنترل مقاوم در کنترل سیستم استفاده می کنید؟؟
مهندس رشیدی
@آهور,
در نمونه ای که در این سری از آموزش ها توضیح داده می شود، ضرایب ثابت هستند چراکه هدف نهایی صحت سنجی با مراجع است اما با کمی تغییر، برای ضرایب متغیر هم قابل حل هستند.
در کل، کلیت و ساختار معادلات استفاده شده برای هر دو حالت کاملا مشابه هستند.
مهندس رشیدی
@آهور,
درمورد کنترل هم، از آنجا که این سری آموزشی تنها به مدلسازی و شبیه سازی پرداخته شده، مبحث کنترل در آن ارائه نشده اما مدل کاملی به دست خواهد آمد که میتوان کنترلرهای مختلف را بر روی آن اعمال نمود.
رضا
سلام ببخشید برای هواپیمای بدون سرنشین uav ها قابل اجراست???من باید روی این مورد کار کنم ولی با دینامیک هواپیمای عادی متفاوته.لطفا بگین اگه مدرس عزیز در اون مورد هم کار میکنه ، دنبال کنم
مهندس رشیدی
@رضا,
سلام
بله، برای هواپیمای بدون سرنشین هم قابل استفاده است. تنها تفاوت در ضرایب و مشتقات ایرودینامیکی هست که در این مورد در جلسات بعد توضیح داده می شود.
reza
@مهندس رشیدی, ممنون بابت پاسخ
حتما توضیح داده میشه?چون من میخوام هزینه کنم وتهیه کنم و مهمه ک مساله ی من عضوش باشه
و میشه ازش مقاله داد با یکم نو اوری?
مهندس رشیدی
@reza,
بله، توضیح داده خواهد شد.
درمورد مقاله بستگی به سطح کار شما و نوآوری شما دارد.