این پست مربوط به جلسات مجموعه آموزشی مدلسازی و شبیه سازی 6 درجه آزادی هواپیما است. اصطلاح انگلیسی این عبارت 6DOF Aircraft Modeling and Simulation است. انجام تمامی روند، از مدلسازی و استخراج معادلات 6 درجه آزادی تا شبیه سازی و حل معادلات دیفرانسل غیرخطی این سیستم در نرم افزار متلب Matlab و سیمولینک simulink در این مجموعه با جرئیات شرح داده شده است.
در انجام پروژه ها، معمولاً سیستم یا مدلی انتخاب می شود تا به منظور طراحی کنترلر از آن استفاده شده و کنترلری بر روی آن اعمال نمود. در اغلب پروژه ها خصوصاً پروژه های کنترلی، این سیستم یک هواپیما فرض می شود. اما پیش از انجام هر کار لازم است دینامیک سیستم و رفتار متغیرهای آن بررسی و مورد ارزیابی قرار گرفته و از صحت مدل اطمینان حاصل نمود. بنابراین پس از استخراج معادلات، باید به اعتبارسنجی و صحت سنجی آن با روش های مختلف پرداخته و با منطق و ریاضیات و نیز مراجع موجود مقایسه شود که این موارد نیز در این سری از آموزش ها ارائه شده است.
جلسه اول:
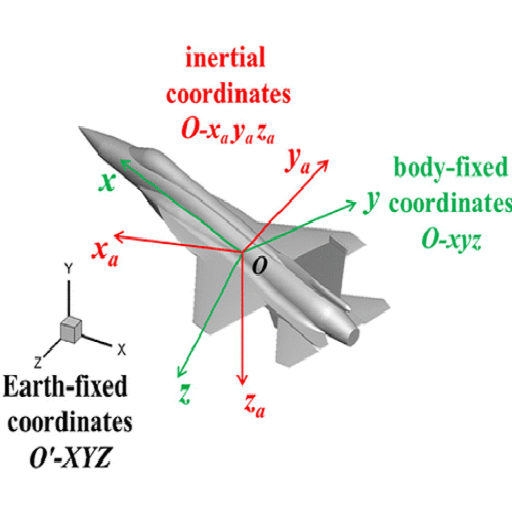
در این جلسه که اولین جلسه از “مجموعه آموزشی مدلسازی و شبیه سازی 6 درجه آزادی هواپیما” بوده، به توضیحات مقدماتی درباره ی مفاهیم ریاضی در مدلسازی، تعریف قاب و دستگاه مختصات و ماتریس های تبدیلِ دستگاه های مختصات پرداخته شده است.
علاوه بر این تعاریف که جزء ابزارهای لازم برای مدلسازی بوده، به تعریف زوایای اویلر نیز اشاره می شود. سپس فرضیات درنظر گرفته برای مدلسازی شرح داده شده و به بیان ورودی های کنترلی، متغیرهای سیستم و خروجی های معادلات پرداخته شده است. در ادامه، به منظور تدوین معادلات حرکت هواپیما، از قوانین نیوتون و اویلر استفاده کرده و با کمک تعاریف ارائه شده از قاب و دستگاه، به استخراج معادلات دیفرانسیل مربوط به سرعت های خطی بدنی و سرعت های زاویه ای بدنی پرداخته شده است. این معادلات شامل معادلات دیفرانسیل مربوط به مؤلفه های نیرو و گشتاورها در سه راستای x و y و z هستند.
مدت زمان: 1 ساعت
محتوا: فایل تصویری و پاورپوینت درس
پیش نمایش جلسه اول:
جلسه دوم:
در این جلسه که دومین جلسه از “مجموعه آموزشی مدلسازی و شبیه سازی 6 درجه آزادی هواپیما” بوده، به استخراج معادلات سینماتیک هواپیما پرداخته شده است.
در این قسمت، با تعریف ماتریس تبدیل بین دستگاه بدنی و اینرسی که تحت تبدیل زوایای اویلر به دست آمده، معادلات موقعیت های مکانی هواپیما در سه راستای x و y و z به دست می آید. سپس به ارتباط بین نرخ چرخش دستگاه مختصات اینرسی و بدنی پرداخته شده است و یک مجموعه معادلات دیفرانسیل برای سرعت های زاویه ای بدنی به دست می آید. بنابراین با توجه به 6 معادله ی نیرو و گشتاور که در جلسه قبل استخراج شده بود (معادلات نیوتون و اویلر)، مجموعه معادلات دیفرانسیلی کاملی به دست آمده که از آن می توان برای شبیه سازی استفاده نمود. در ادامه به توضیح پرواز مستقیم الخط پرداخته، نیروها و گشتاورها را در این حالت به دست آورده و در نهایت معادلات کاملی از پرواز حالت دائم Steady Rectilinear Flight به دست می آید که در جلسه بعد شبیه سازی آن انجام خواهد شد.
مدت زمان: 1 ساعت
محتوا: فایل تصویری و پاورپوینت درس
پیش نمایش جلسه دوم:
جلسه سوم:
در این جلسه که سومین جلسه از “مجموعه آموزشی مدلسازی و شبیه سازی 6 درجه آزادی هواپیما” بوده، ابتدا به تعریف شرایط تریم می پردازیم.
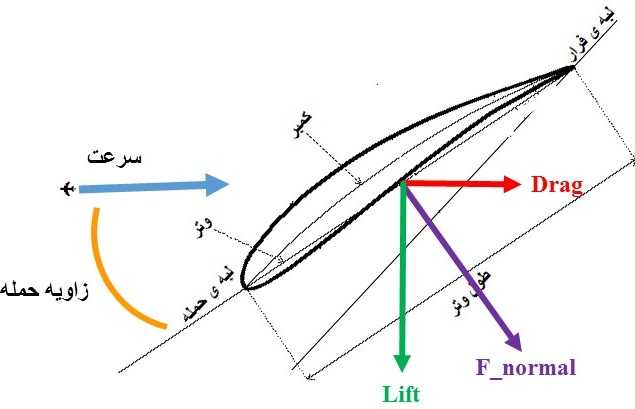
سپس به بازنویسی معادلات دیفرانسیل کلی هواپیما برای شرایط پرواز حالت دائم Steady State Flight پرداخته می شود که در آن نرخ تغییرات مؤلفه های سرعت خطی بدنی و مؤلفه های سرعت زاویه ای بدنی صفر هستند. در ادامه حرکت مستقیم الخط که یکی از مانورهای پرواز حالت دائم Steady State Flight بوده بررسی و توضیح داده می شود. در این شرایط پروازی، علاوه بر صفر بودن نرخ تغییرات سرعت خطی و بدنی، تغییرات زوایای اویلر و نیز سرعت های زاویه ای بدنی صفر هستند. با این شرایط تنها سرعت خطی بدنی و موقعیت های اینرسی آن از اهمیت برخوردار بوده و به نحوی، با صفر قرار دادن هر یک از مؤلفه های مربوط به نیروها و گشتاورها به حل معادلات پرداخته می شود. در این معادلات فرض می شود مشخصات جرمی و هندسی، پارامترهای ارتفاع، سرعت پرواز و نیز ضرایب ایرودینامیکی معلوم بوده و ورودی های کنترلی (زاویه الویتور، ایلرون و رادر)، زاویه حمله و زاویه لغزش و نیز تراست موتور، مجهولات معادلات هستند.
مدت زمان: 1 ساعت
محتوا: فایل تصویری، پاورپوینت درس، کدهای متلب
پیش نمایش جلسه سوم:
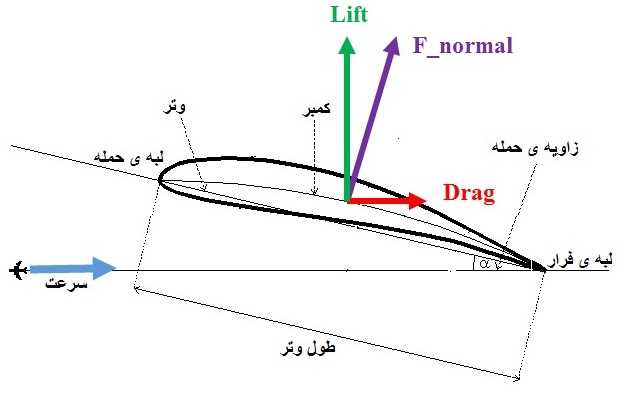
شکل مربوط به توضیح گذاشتن قدرمطلق برای زوایا در ادامه آمده است.
عکس اول
عکس دوم
جلسه چهارم:
در این جلسه که چهارمین جلسه از “مجموعه آموزشی مدلسازی و شبیه سازی 6 درجه آزادی هواپیما” بوده، ابتدا فرضیات معادلات حرکت هواپیما، متغیرهای حالت سیستم و ورودی و خروجی های آن مشخص می شوند.
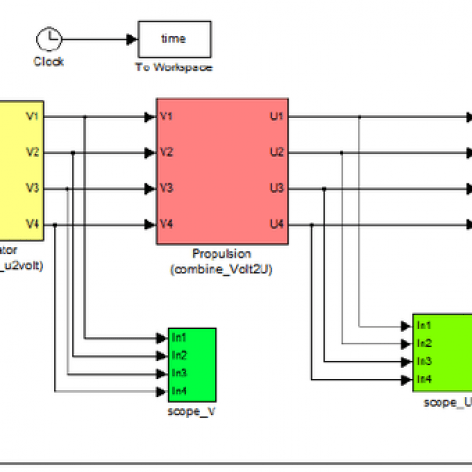
سپس طرح کلی نوشتن معادلات در سیمولینک ارائه می شود. سیمولینک مربوط به معادلات دارای بخش های مربوط به نیروها و گشتاورهای وزنی، نیروها و گشتاورهای ایرودینامیکی و نیز نیروها و گشتاورهای مربوط به موتور هستند. در انتها، تمامی این نیروها و گشتاورها برای معادلات نیوتون و اویلر استفاده خواهد شد. علاوه بر این معادلات (معادلات دیفرانسیل مربوط به سرعت های خطی و سرعت های زاویه ای)، معادلات مربوط به نرخ تغییر زوایای اویلر و نیز معادلات دیفرانسیل موقعیت های اینرسی نیز در بلوک مربوط به معادلات غیرخطی اضافه می شوند. در این جلسه تنها به استخراج معادلات مربوط به بخش نیروها و گشتاورهای وزنی و ایرودینامیکی پرداخته می شود. همچنین نکات لازم در نحوه نوشتن معادلات و دستگاه های مربوط به آن ها نیز با جزئیات شرح داده می شود.
مدت زمان: 1 ساعت و 15 دقیقه
محتوا: فایل تصویری، پاورپوینت درس، کدهای متلب
پیش نمایش جلسه چهارم:
جلسه پنجم:
در این جلسه که پنجمین جلسه از “مجموعه آموزشی مدلسازی و شبیه سازی 6 درجه آزادی هواپیما” بوده، به ادامه مدلسازی و شبیه سازی پرداخته شده است.
در این جلسه به تکمیل همه معادلات دیفرانسیل که شامل معادلات نیوتون، اویلر، معادلات مربوط به نرخ تغییرات زوایای اویلر و معادلات موقعیت های اینرسی هستند، پرداخته شده است. بدین منظور در سیمولینک موردنظر این معادلات بازنویسی خواهد شد. در ادامه، به شبیه سازی و صحت سنجی مدلسازی و شبیه سازی پرداخته خواهد شد. سناریوهای مورد نظر برای این کار، شبیه سازی در شرایط تریم و غیر تریم و نیز شبیه سازی با اضافه نمودن ضربه به ورودی الویتور صورت می گیرد. مشاهده می شود که در شرایط تریم همه متغیرها بر روی مقدار تریم باقی می ماند و در دو شرایط دیگر، متغیرها پس از مدتی اغتشاش، به مقدار تریم بازخواهند گشت.
مدت زمان: 50 دقیقه
محتوا: فایل تصویری، پاورپوینت درس، کدهای متلب
پیش نمایش جلسه پنجم:
جلسه ششم:
در این جلسه که ششمین جلسه از “مجموعه آموزشی مدلسازی و شبیه سازی 6 درجه آزادی هواپیما” بوده، ابتدا به توضیح پرواز اغتشاشی پرداخته شده است.
سپس به کمک نظریه اختلالات کوچک، خطی سازی معادلات غیرخطی (با تعریف فرضیات ساده کننده) انجام می شود. سپس به مقایسه این معادلات با معادلات پرواز دائم پرداخته می شود. همچنین نیروها و گشتاورها و نیز ضرایب و مشتقات ایرودینامیکی در این حالت (Perturbed) با شرایط Steady State مقایسه شده و توضیح داده می شود. در ادامه با استفاده از دستورهای موجود در نرم افزار MATLAB به خطی سازی معادلات غیرخطی (کد سیمولینک استخراج شده در جلسات قبل)، دکوپله کردن معادلات، به دست آوردن ریشه های معادله مشخصه ی هر کانال (طولی و عرضی-سمتی)، استخراج توابع تبدیل و نیز به دست آوردن صفرها و قطب های توابع تبدیل خواهیم پرداخت.
مدت زمان: 1 ساعت و 10 دقیقه
محتوا: فایل تصویری، پاورپوینت درس، کدهای متلب
پیش نمایش جلسه ششم:
جلسه هفتم:
در این جلسه که هفتمین جلسه از “مجموعه آموزشی مدلسازی و شبیه سازی 6 درجه آزادی هواپیما” بوده، به ادامه مباحث مدلسازی پرداخته شده است.
مباحث تکمیلی شامل مدل کردن تغییرات ضرایب ایرودینامیکی بر حسب متغیرهای مختلف از جمله ارتفاع و زاویه حمله، مدل کردن موتور و گشتاورهای ناشی از فاصله آن تا مرکز جرم و نیز مدلسازی روتور و اجزای گردنده در موتور است. همچنین به نحوه ی مدلسازی و شبیه سازی دو مورد در MATLAB و توضیحات آن پرداخته شده است.
مدت زمان: 50 دقیقه
محتوا: فایل تصویری، پاورپوینت درس، کدهای متلب
پیش نمایش جلسه هفتم :
مطالعه بیشتر
 مرجع مهندسی كنترل | دانش با کیفیت در مرز علم
مرجع مهندسی كنترل | دانش با کیفیت در مرز علم



{kind=link}
{kind=link}
چهرزاد
با سلام و تشکر از ارائه مطالبتون
در اجرای سیمولینک با ارور
Error evaluating ‘InitFcn’ callback of block_diagram ‘Approach_Learjet’.
Caused by:
Undefined function or variable ‘Trim_Learjet’.
مواجه میشوم که گویا به علت تعریف ام فایل Trim_Learjet در قسمت ورودی تابع در قسمت model properties-callbacks است. یعنی در این قسمت میبایست یک تابع تعریف شود ولی چون ام فایل است لذا سیمولینک اجرا نمیشود.
البته در آموزش جلسه 4 در دقیقه 21 دقیقا مدرس همین روش رو معرفی میکنه.
لطفا راهنمایی کنید این مشکل در برنامه بنده برطرف بشود
مهندس رشیدی
سلام
من متوجه سؤال نشدم چون در سیمولینک تو callback فقط باید Init لود بشه و وقتی اون لود بشه Trim هم همراهش لود میشه مگر اینکه اون کدهای ام فایلی در پوشه اصلی شما نباشند.
چهرزاد
@مهندس رشیدی,
بله کدهای ام فایل در پوشه ای هستند که فایل سیمولینک از آنجا اجرا میشود
اما در ابتدای اجرای شبیه سازی سیمولینک ارور بالا ظاهر میشه و run متوقف میشه
وقتی علت رو بررسی کردم تا اونجایی که من متوجه شدم در مسیر
model properties/ callbacks/ InitFCN
ام فایل Trim_Learjet; به عنوان ورودی های مورد نیاز برای اجرای سیمولینک معرفی شده است
در حالی که در این بخش گویا فقط باید ام فایلی معرفی بشود که ساختار function داشته باشد
این در حالیست که مدرس آموزش مربوطه نیز همین روش را آموزش داده اند
و با توجه به آموزش بنده گام به گام پیش رفتم اما با ارور زیر مواجه شدم
Error evaluating ‘InitFcn’ callback of block_diagram ‘Approach_Learjet’.
Caused by:
Undefined function or variable ‘Trim_Learjet
راه حل چیست؟
مهندس رشیدی
سلام
آیا احتمال اشتباه نوشتن حروف کوچک و بزرگ در توابع وجود نداره؟ در داخل InitFCn تابع Trim_Learjet درست معرفی و نوشته شده است؟
مریم
سلام اخر جلسه هفتم مدرس فرمودنند که مباحث مربوط به تغییر نیرو و گشتاور بر اثر مصرف سوخت باقی مانده جلسه بعدی میگویند منظور جلسه هشتم ؟که اینجا نیست به نظرم موضوع مهمی لطفا راهنمای کنید جظور اون جلسه رو تهییه کنیم
مهندس رشیدی
سلام
متأسفانه این جلسه آماده نشده است.
مریم
@مهندس رشیدی, سلام خانم مهندس ایا امکان اماده سازی این جلسه وجوددارد
مهندس رشیدی
سلام
شاید یک ماه دیگه!
مریم
@مهندس رشیدی, واقعا ممنون میشم خانم مهندس ببخشید من چند سوال داشتم از خدمتتون چطور میتونم با شما تماس داشته باشم؟
مهندس رشیدی
سلام
از طریق سایت بفرمایید تا اگر سؤال دوستان هم بود رفع بشه.
مهدی حدید
سلام . آیا این روند برای طراحی و شبیه سازی چتر نجات هم صادق هست؟
مهندس رشیدی
سلام
بله قابل استفاده است.
مهدی حدید
سلام. من 5 جلسه اول را خریداری کردم اما پس از دانلود فایل ها نیاز به پسورد دارند و باز نمیشوند. چطوری به رمزشون دسترسی پیدا کنم؟
مدیر سایتادمین سایت ( مالک تایید شده )
@مهدی حدید,
سلام در قسمت نظرات همین بخش این پسورد نوشته شده است. لطفا با دقت بیشتری پست رو مطالعه بفرمایید
gozarali
سلام
این محصول شما را خریداری کردم اما رمز میخواد. متاسفانه لینک صفحه دانلود را پاک کردم. چطور میتونم به فایلم دسترسی پیدا کنم. لطفا کمک کنید.
مهندس رشیدی
سلام
آیا از طریق ایمیل دریافت کردید؟
najmehafzali65@.com
khob javab nadadin k
مهندس رشیدی
سلام
بحث SAS دردرس کنترل و پایداری هواپیما مطرح میشه که هنوز آپلود نشده است.
مهندس رشیدی
عذرمیخوام
چه سوالی رو؟
najmehafzali65@.com
salam bahse sas to kodam ghesmate
مهندس رشیدی
سلام
بحث SAS دردرس کنترل و پایداری مطرح میشه که هنوز آپلود نشده است.
مهندس رشیدی
در حال آماده سازی است.
مهندس رشیدی
سلام
یک جلسه آپلود شد.
saber
البته درست ترش به این صورت است :
Theta_desired=alpha1 + gamma1
درست است؟
مهندس رشیدی
اگر برای کنترل مدنظرتون هست، چنانچه در شرایط تریم شبیه سازی صورت بگیره مقادیر روی تریم باقی خواهد ماند در غیر این صورت احتمال داره اغتشاشی مثل باد اعمال کرده باشید به سیستم و بخواهید پرنده به تتای مطلوب برسه. شما می تونید تتای مطلوب رو هر مقدار منطقی که مدنظرتون هست قرار بدهید.
saber
پس دارید میگید theta0 که همون اختلاف بین alth0 , gamma0 است همان نقطه کار مدل خطی ما برای این زاویه می باشد درسته؟
مهندس رشیدی
منظورم مجموع هست.
theta0 = alpha0 + gamma0
این میشه نقطه کاری تتا
saber
با سلام
تابع تبدیل خطی سازی شده ای که شما بدست آورده اید برای زاویه تتا به دلتا الویتور حول چه نقطه کاری می باشد؟
از کجا می توانیم متجه شویم؟
اگر زودتر به بنده پاسخ دهید سپاس گزار می باشم.
مهندس رشیدی
سلام
اگر منظورتون با استفاده از linmode هست همون زاویه تریم هست که تتا میشه، مجموع آلفا و گاما. همون که در شبیه سازی نوشتیم X که میشه مؤلفه ی 8 از این بردار.