آموزش مد لغزشی طبق کتاب اسلوتین
در این پست فیلم آموزش مد لغزشی طبق کتاب اسلوتین قرار داده میشود. کتاب اسلوتین رو اگه خونده باشید متوجه خواهید شد که بسیاری از مطالب این فصل گنگ هستند و نیاز به توضیحات بیشتر دارن. ضمن اینکه به نظر من بعضی از مطالب این کتاب بعد از اینکه فصل به پایان رسید باید باز هم در موردشون بحث بشه اما توی کتاب این امکان وجود نداره . از طرفی مثال هایی در این کتاب وجود داره که اگه با روند شبیه سازی اون ها هم آشنا بشیم در یادگیری این روش جذاب بسیار موثره. من مد لغزشی رو بارها و بارها بر روی سیستم های مختلف شبیه سازی کردم و مقالات زیادی در این زمینه کار کردم.
چیزی که من تضمین میدم اینه که بعد از این دوره آموزشی، به نتایج زیر خواهید رسید:
مد لغزشی رو به طور کامل و فراتر از مطالب کتاب درک خواهید کرد
با نحوه شبیه سازی مثال ها و بحث روی آنها کاملا آشنا خواهید شد
نحوه تلفیق این روش با روش هایی مثل فازی، ژنتیک و … رو خواهید آموخت (مد لغزشی فازی در همین سایت قرار داده شده است برای دانلود این فیلم آموزشی کلیک بفرمایید)
پیاده سازی این روش بر روی سیستم های غیرخطی پیچیده و شبیه سازی آنها رو یاد خواهید گرفت.
میتونید برای سیستم خودتون این شبیه سازی ها رو انجام بدید
مقالات مختلف رو که در زمینه مد لغزشی هستن میتونید براحتی درک کنید.
تفاوت این آموزش با آموزش دیگری تحت عنوان “آموزش مد لغزشی از طراحی تا شبیه سازی“ که در سایت قرار داده شده در این هست که آموزشی که در این پست قرار داره برای افرادیه که میخوان با عمق بیشتری مد لغزشی رو یاد بگیرن و اون آموزش برای کسیه که اطلاعات بسیار ناچیزی از مد لغزشی داره و فقط میخواد روی یه سیستم ساده یک مد لغزشی ساده رو پیاده کنه. اما در اینجا هم با مباحث بیشتری آشنا خواهید شد و هم مطالب با عمق بیشتری ذکر خواهند شد. همچنین یک “جزوه کاربردی مد لغزشی“ نیز در این سایت قرار داده شده است که همونطور که از اسمش معلومه فقط حالت کاربردی داره.
جلسه اول:
مقدمات و تبدیل مسئله مرتبه n به مسئله مرتبه یک
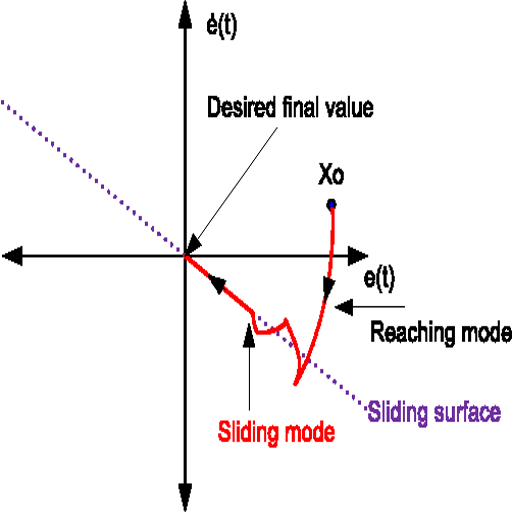
در این جلسه در مورد صورت مسئله مد لغزشی، انواع نامعینی، سطوح لغزشی و از همه مهمتر تبدیل مسئله مرتبه ان به مسئله مرتبه یک در مد لغزشی پرداخته شده است. در ادامه کلا در ارتباط با اینکه چطور میتوان یک مسئله ردیابی مرتبه ان رو به یک مسئله پایدارسازی از مرتبه یک (سطح سوئیچینگ) تبدیل کرد بحث کرد.
مدت زمان آموزش: 67 دقیقه
محتویات دانلود : فیلم، پاورپوینت درس
جلسه دوم:
شرط لغزشی ، فیلیپف دینامیک معادل
مبحث ناتمام جلسه قبل در این جلسه به اتمام میرسد. سپس در مورد شرط لغزش به طول مفصل بحث میشود همچنین در ادامه پدیده چترینگ توضیح داده شده است و در نهایت به توضیح فیلیپف و دینامیک معادل پرداخته شده است. دقت کنید این مطلب در کتاب اصلا بخوبی تفسیر داده نشده است.
مدت زمان آموزش: 55 دقیقه
محتویات دانلود : فیلم، پاورپوینت درس
جلسه سوم:
نحوه طراحی و شبیه سازی مد لغزشی به صورت گام به گام
در این جلسه ابتدا یک الگوریتم برای طراحی مد لغزشی ارائه شده است. این الگوریتم به صورت واضح بیان شده است و به صورت مفصل در مورد آن بحث شده است. مباحثی از قبیل نحوه انتخاب سطح لغزش، چرا سطح لغزش به فرمی که در کتاب است در نظر گرفته می شود؟ چرا در همه مقالات به این فرم نیست و ….. و در ادامه با یک مثال تک ورودی و تک خروجی ابتدا طراحی به طور کامل و براساس الگوریتمی که در ابتدای جلسه گفته شد انجام میشود و سپس این مثال در نرم افزار MATLAB شبیه سازی شده است. و در پایان، به بحث در مورد پارامتر های طراحی در این نرم افزار پرداخته شده است.
مدت زمان آموزش: 55 دقیقه
محتویات دانلود : فیلم، پاورپوینت درس و ام فایل مربوط به درس
جلسه چهارم:
طراحی و شبه سازی مد لغزشی برای سیستم های مرتبه دو و سه
در این جلسه طراحی کنترل کننده مد لغزشی و شبیه سازی آن در نرم افزار MATLAB برای دو سیستم مرتبه دو و سه انجام شده است. یکی از بحث های مهم طراحی مد لغزشی یعنی تبدیل هر سیستم غیرخطی به سیستم مرتبه دوم استاندارد به طور مفصل بحث شده است. همچنین مباحث تکمیلی در مورد تعریف سطح لغزش در مثال مربوط به سیستم مرتبه سه ذکر شذه است.
مدت زمان آموزش: 66 دقیقه
محتویات دانلود : فیلم، پاورپوینت درس و 2 ام فایل مربوط به درس
جلسه پنجم:
کنترل انتگرالی ، حد بهره
در ابتدای جلسه، کنترل کننده مد لغزشی برای سیستم های مرتبه n طراحی شده است تا اگر سیستم شما مثلا دارای درجه نسبی ده بود دیگه از اول تا آخر طراحی رو انجام ندید و یا اینکه اگه میخواید طراحی رو انجام بدید بدونید میخواید به چه چیزی برسید. در ادامه به بحث در مورد کنترل انتگرالی و حد بهره پرداخته شده است. توی کتاب دلیل استفاده از کنترل انتگرالی و اینکه چرا باید سطح لغزش در ابتدا صفر باشد چیزی نگفته. از طرفی مثال هم حل نشده است. ما در این آموزش هم کاربرد کنترل انتگرالی رو گفتیم و هم یک مثال رو در نرم افزار متلب شبیه سازی کردیم. پس از اون، به نقطه اوج طراحی مد لغزشی یعنی برای سیستم هایی که به فرم x^(n)=f(x)+g(x)u هستند پرداخته شده است. نحوه اثبات در کتاب خیلی گنگه. این اثبات با تمام جزئیات از ابتدا تا انتها ذکر شده است.
مدت زمان آموزش: 66 دقیقه
محتویات دانلود : فیلم، پاورپوینت درس و ام فایل مربوط به درس
جلسه ششم:
چترینگ و راههای حذف آن (1)
در ابتدا به طراحی یک مثال برای سیستمی که بهره داشته باشه پرداخته شده است. سپس وارد موضوع چترینگ شدیم. کاربردهای چترینگ، نحوه حذف چترینگ در حالت کلی، دسته بندی که برای حذف چترینگ برای حالت های مختلف میتوان انجام داد و شبیه سازی یک مثال برای حالتی که لایه مرزی ثابت باشد موضوعاتیست که در این جلسه کار شده است. برای حذف چترینگ دو دسته بندی کلی انجام شده است یکی حذف چترینگ برای سیستم هایی که باید در آنها لایه مرزی ثابت باشد و دیگری حذف چترینگ برای سیستم هایی که در آنها لایه مرزی متغیر بهتر از لایه مرزی ثابت جواب می دهد. در این جلسه به دسته بندی اول پرداخته شده است.ضمنا مثالی که در این جلسه شبیه سازی شده است مثال7-2 کتاب است.
مدت زمان آموزش: 53 دقیقه
محتویات دانلود : فیلم، پاورپوینت درس و ام فایل مربوط به درس
جلسه هفتم:
چترینگ و راههای حذف آن (2)
در این جلسه به راه حل جذف چترینگ با استفاده از لایه مرزی متغیر پرداخته شده است. این روش برای سیستم هایی که ضریب ورودی کنترلی در آنها یک هست و نیست بررسی شده است و با ذکر مثال و شبیه سازی آن در نرم افزار متلب به صورت مفصل بحث شده است. حذف چترینگ با استفاده از لایه مرزی متغیر با زمان برای سیستم های خاصی هست. پیشنهاد می شود در صورتیکه فقط می خواید این جلسه رو خریداری بفرمایید جلسه قبل رو هم تهیه کنید چون ممکنه برای سیستم شما استفاده از این روش موضوعیت نداشته باشد.
مدت زمان آموزش: 55 دقیقه
محتویات دانلود : فیلم، پاورپوینت درس و ام فایل مربوط به درس
جلسه هشتم:
طراحی مد لغزشی برای یک سیستم چند ورودی – چند خروجی
یک مثال جامع که تمامی مباحث قبل رو بتونه پوشش بده رو طراحی کردم. مد لغزشی با در نظر گرفتن تمامی جوانب برای این سیستم طراحی شده است. در این مثال، یک سیستم دو ورودی و دو خروجی که چهار متغیر حالت دارد در نظر گرفته شده است. محدودیت های لامبدا نیز در صورت سوال مطرح شده است و این موضوع در ابتدای جلسه بحث شده است که چطور می توان محدودیت های مختلف را بر روی پارامتر لامبدا اعمال کرد.توجه بفرمایید این جلسه آخرین جلسه از مجموعه آموزش های مد لغزشی بر اساس کتاب اسلوتین بود. در ادامه سعی دارم نحوه تلفیق این روش با روش های دیگر و انواع دیگر مد لغزشی رو برای شما آماده کنم.
مدت زمان آموزش: 54 دقیقه
محتویات دانلود : فیلم، پاورپوینت درس
جلسه نهم:
در اين جلسه، يک واسط گرافيکي در متلب (gui) توليد شده که با استفاده از آن به طور اتوماتیک مي توانید يک کنترل کننده مد لغزشی (Sliding Mode) براي يک سيستم طراحي کنید. در واقع چکیده مباحث تدریس شده به صورت یک پنل تصویری در این جلسه آمده است. مخصوصاً برای دوستانی که فقط خروجی کار برای آنها مهم است، این واسط گرافيکي می تواند بسیار مفید باشد. این جلسه توسط آقای نورمحمدی فارغ التحصیل ارشد شریف تدریس شده است
برای خرید جلسه 9 به صورت جداگانه می توانید با کلیک بر روی دکمه خرید زیر این جلسه را نیز به سبد خریدتان اضافه کنید
جلسه 9 : طراحی مد لغزشی با استفاده از gui
|
۱۶۰,۰۰۰ تومان قیمت اصلی: ۱۶۰,۰۰۰ تومان بود.۱۱۷,۶۰۰ تومانقیمت فعلی: ۱۱۷,۶۰۰ تومان.Add to cart
|
مطالعه بیشتر
 مرجع مهندسی كنترل | دانش با کیفیت در مرز علم
مرجع مهندسی كنترل | دانش با کیفیت در مرز علم






محمد
باسلام و وقت بخیر
ممنون از آموزش خوب شما.
یک سیستم دارم که برای آن کنترلر مد لغزشی طراحی کردهام. مشکلی که دارم این است که فرمان اولیه کنترلر، بزرگ هست و عملگر را به اشباع میبرد. برای این مشکل، چه راه حلی وجود دارد؟
مدیر سایتادمین سایت ( مالک تایید شده )
سلام. اگر با مد لغزشی ورودی کنترلی خیلی بزرگ بدست بیاد برای همه کنترل کننده های دیگه هم همینطوره. نکته بعد اینکه تنها راه قرار دادن اشباع روی ورودی کنترلی شماست. برای این کار دو مسیر وجود داره یا باید از اول اشباع رو در نظر بگیرید و با وجود اشباع پایداری اثبات بشه که این یک موضوع پیچیدست و مقالات مخصوص به خودش رو می طلبه. یا اینکه از یک اشباع بزرگ شروع کنید و کم کم دامنه اشباع رو کمتر کنید تا جایی که خطای سیستم همچنان مطلوب باشه . جایی که خطا نامطلوب میشه همون جایی هست که ماکزیمم اشباع رو می تونید روی سیستمون بذارید. نکته آخر اینکه قاعدتا نباید ورودی کنترلی که بدست میارید “خیلی” با دامنه مد نظرتون فاصله داشته باشه. اگر “خیلی” تفاوت داره بنظر میرسه خطا رو بیش از حد دارید بش وزن میدید.
محمد
سلام آقای دکتر
یک سوال داشتم. اگر خروجی کنترلی مقید باشد چگونه میتوانیم این امر را در طراحی کنترلر مدلغزشی وارد کنیم؟ یعنی کنترل کننده طوری طراحی شود که هیچگاه عملگرها اشباع نشود؟
خودم فکر میکنم باید پارامتر eta به صورت تطبیقی تنظیم شود. اما نمیدونم چگونه مخصوصا اینکه سیستمم چند ورودی است.
ممنون میشوم اگر راه حلی دارید بفرمایید.
مدیر سایتادمین سایت ( مالک تایید شده )
سلام اونطور که من متوجه شدم شما میخواید روی ورودی کنترلی یک اشباع داشته باشید. معمولا برای این کار ما طراحی رو انجام میدیم و بعد از یک مقدار زیاد اشباع رو قرار میدیم و کم کم اون اشباع رو پایینتر میاریم تا جایی که خروجی هامون به هم نریزه و خطای مطلوب هم داشته باشیم. خب البته این یک روش تحلیلی نیست صرفا براساس سعی و خطاست. ولی اگر بخایم به صورت تحلیلی حل کنیم این یک کار پیچیدست و به این سادگی قابل حل نیست. در واقع شما باید مقالاتی رو مطالعه کنید که از اول اشباع رو در نظر میگیرند و با وجود اشباع پایداری رو اثبات می کنن
سارا
با سلام و احترام
لطفا راهنمایی بفرمایید که در طراحی کنترل لغزشی موتور pmsm با معادله iqref=d*int (-c*w-k*TLhat+kc*sgn(s)) , سطح لغزش s=ce.de
مطابق اموزش داده شده چطوری مقادیر F , fhat را بدست آورم.؟ لطفااا راهنمایی کنید ممنونم.
مهدی
سلام اقای دکتر موسی پور ممنون بابت آموزش های خوب
معادلات سیستم من 5 متغیر حالت داره و 4ورودی که برای یک ماشین الکتریکی مخصوص است و یکی از معادلات حالت این طور هست:
Wmdot=k(TETAe)*ia/j +k(TETAe-2pi/3)*ib/j+k(TETAe-4pi/3)*ic/j- B*Wm/j – TL/j
TETAe زاویه الکتریکی متغیرهای حالت : ia , ib , ic , Wm , TETAr منابع ورودی : TL , Va , Vb , Vc
حالا در سیستم من خطایی که وجود دارد خطای گشتاور است و تنها معادله حالتی که گشتاور در آن وجود دارد همین معادله ای است که عرض شد. آیا خطای گشتاور را برابر سطح لغزش قرار دهیم؟ و از همین معادله استفاده نمایم؟
مدیر سایتادمین سایت ( مالک تایید شده )
سلام باید تمامی معادلات رو با هم در نظر گرفت برای راحتی متغیرهای حالتتون رو با ایکس و پارامترهاتون رو به جاشون یک قرار بدید و دوباره بفرستید
مهدی
سلام اقای دکتر موسی پور ممنون از آموزش خوبتون
سوالی جزیی دارم که در ایمیل شما پرسیدم ممنون میشم اگر پاسخ بدید
مدیر سایتادمین سایت ( مالک تایید شده )
سلام اوکی
sara
با سلام و احترام
یک موتور را با کنترل مد لغزشی در عمل می خواهیم کنترل کنیم . xd هم دائما در حال تغییر است. و تغییرات بار هم داریم.با توجه به فایل های آموزشی که مطالعه کردم آیا باید از لایه مرزی متغیر استفاده کنیم؟ لطفا در این رابطه راهنمایی بفرمایید. ممنون.
مدیر سایتادمین سایت ( مالک تایید شده )
سلام مقدار مطلوب ایکس ربطی به لایه مرزی نداره.
محمد
با سلام اقای دکتر و تشکر بابت آموزش های بسیار عالیتون اقای دکتر ببخشید ی سوال دارم در انتهای جلسه 7 و ابتدای جلسه 8 که فرمول مربوط به لایه مرزی متغیر فرمودید در فرول فرمودید Bd هست مگر B برابر رادیکال b+/b- نیست پس هر چی باشه دیگه اصلا x در رابطه نمیمونه که بشه Bd حساب کرد و B همواره ثابته درسته؟؟؟؟؟؟؟؟؟؟؟
sanam
سلام خسته نباشید ممنون از پاسختون
اگر ما از معادلات سیستم مشتق گرفتیم و بهر دلیلی ضریب u صفر شد ، راه حلی وجود داره؟
مدیر سایتادمین سایت ( مالک تایید شده )
سلام
این موضوع به صورت مفصل به همراه مثال در فیلم های آموزشی توضیح داده شد. لطفا مجددا آموزش رو ببینید.
سپاس