مرجع مهندسی كنترل | دانش با کیفیت در مرز علم
مرجع مهندسی كنترل | دانش با کیفیت در مرز علم
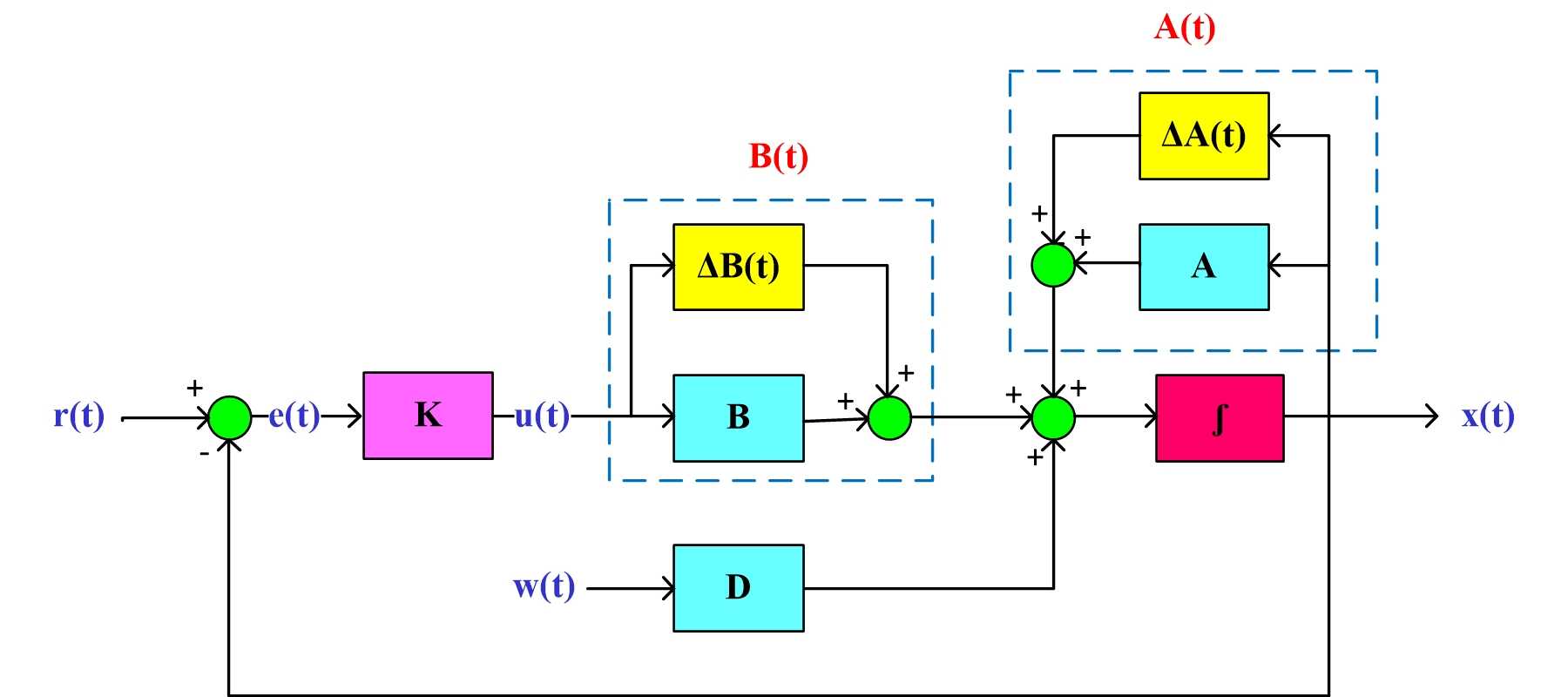
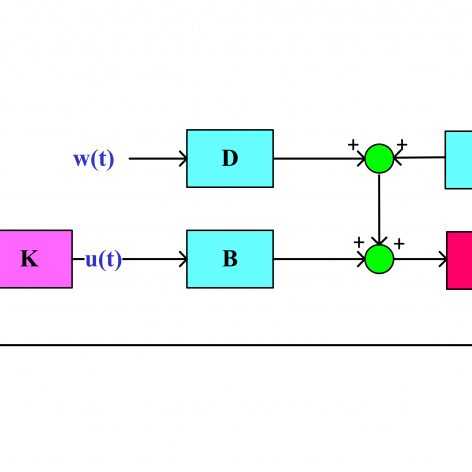
در سری فیلمهای قبلی موجود در سایت، کنترل مقاوم سیستمهای خطی تحت نامعینی پارامتری و کنترل مقاوم ∞H سیستمهای خطی دارای اغتشاش از طریق فیدبک حالت و با استفاده از نامساویهای ماتریسی خطی به صورت جداگانه مورد بررسی قرار گرفته و شروط LMI مورد نیاز برای هر دو مورد بدست آمد. خیلی از سیستمها به صورت همزمان تحت تأثیر نامعینی پارامتری و اغتشاش قرار دارند و بنابراین نمیتوان از LMI های بدست آمده در سری فیلمهای فوق برای این سیستمها استفاده کرد. در این سری جلسات برای این سیستمها که کلی تر هم هستند، LMI های مورد نیاز برای بدست آوردن بهره کنترل کننده فیدبک حالت جهت حذف اثر نامعینی پارامتری و همچنین تضعیف اغتشاش محاسبه خواهند شد. برای نشان دادن عملکرد خوب این کنترل کننده روش پیشنهادی روی سیستم تعلیق فعال خودرو پیاده شده و با حالت غیر فعال مقایسه شده است. امیدوارم مورد توجه شما قرار بگیرد…
پیشنیازها: آشنایی اولیه با جبر خطی و تئوری پایداری لیاپونوف – آشنایی با کدنویسی در محیط متلب – آشنایی با نامساویهای ماتریسی خطی (LMI)
قبل از دیدن ادامه پست، راهنمای استفاده از سری فیلمهای کنترل مقاوم را حتما ببینید:
جلسه اول:
فرمولبندی طراحی کنترل مقاوم فیدبک حالت برای سیستمهای دارای اغتشاش خارجی و نامعینی پارامتری و استخراج LMI های مورد نیاز
جلسه دوم:
پیادهسازی کنترلکننده مقاوم بر روی سیستم تعلیق فعال خودرو و شبیهسازی در متلب
قیمت اصلی: ۴۰۸,۰۰۰ تومان بود.۲۳۲,۸۰۰ تومانقیمت فعلی: ۲۳۲,۸۰۰ تومان.Add to cart
قیمت اصلی: ۴۰۸,۰۰۰ تومان بود.۲۳۲,۸۰۰ تومانقیمت فعلی: ۲۳۲,۸۰۰ تومان.Add to cart