 مرجع مهندسی كنترل | دانش با کیفیت در مرز علم
مرجع مهندسی كنترل | دانش با کیفیت در مرز علم

Neural network-based adaptive tracking control of mobile robots in the presence of wheel slip and external disturbance force این مقاله به طور…
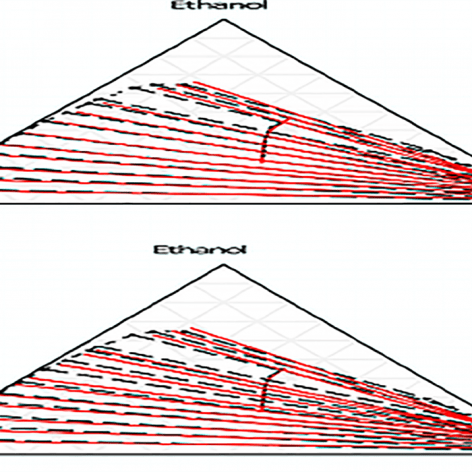
در این پروژه تعادل سه جزیی مایع-مایع Water/tert-butyl alcohol (TBA)/ 2-ethyl-1-hexanol با مدل UNIQUAC جهت بدست آوردن جز مولی هر جزء مورد بررسی قرار گرفته است که با مقایسه داده های آزمایشگاهی با نتایج حاصل از مدل UNIQUAC نتایج قابل قبولی بدست آمده است.

در این پست فیلم آموزش مد لغزشی طبق کتاب اسلوتین قرار داده میشود. کتاب اسلوتین رو اگه خونده باشید متوجه خواهید شد که بسیاری از مطالب این فصل گنگ هستند و نیاز به توضیحات بیشتر دارند.
در این پست فیلم آموزشی طراحی مد لغزشی و شبیه سازی روی یک سیستم رو گذاشتم. این فیلم تقریبا براساس جزوه ای هستش که توی سایتم هست. اما برتری این فیلم نسبت به جزوه اینه که راحت تر میشه روی نمودارها و روابط بحث کرد.
