 مرجع مهندسی كنترل | دانش با کیفیت در مرز علم
مرجع مهندسی كنترل | دانش با کیفیت در مرز علم
در واقع LQG از یک کنترلکننده بهینه LQR و یک فیلتر کالمن تشکیل شده است که فیلتر کالمن از خروجیهای سیستم تخمین حالتها را در هر لحظه محاسبه کرده و در اختیار کنترلکننده LQR قرار میدهد.
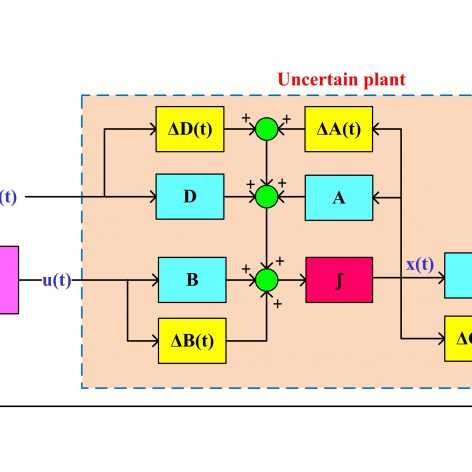
در این سری جلسات قرار است همه این عوامل یکجا در نظر گرفته شده و سیستمهای خطی دارای نامعینی و اغتشاش تنها با فیدبک تعدادی از حالتها کنترل شود و نامساویهای مربوط به این مساله استخراج شود.

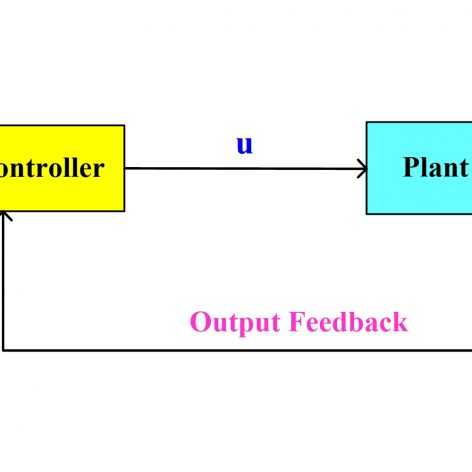
در سری فیلمهای حاضر دقیقا این مشکل مدنظر قرار گرفته و هدف طراحی یک کنترلکننده مقاوم برای سیستمهای خطی تحت تاثیر اغتشاش فقط با استفاده از یک یا چند خروجی سیستم است.

یک کنترل کننده مقاوم دینامیک برای سیستمهای خطی تحت نامعینی پارامتری به گونهای طراحی میشود که فقط از خروجی (یا خروجی های) سیستم برای کنترل استفاده میکند و نیازی به تمام حالتها ندارد.

همونطور که میدانید در سیستمهایی که با کنترل کننده فیدبک حالت پایدارسازی انجام میشود، باید تمامی حالتها اندازهگیری شده و در دسترس باشند. در برخی از سیستمهای کنترل، امکان به کارگیری کنترل کننده فیدبک حالت وجود ندارد.
