 مرجع مهندسی كنترل | دانش با کیفیت در مرز علم
مرجع مهندسی كنترل | دانش با کیفیت در مرز علم
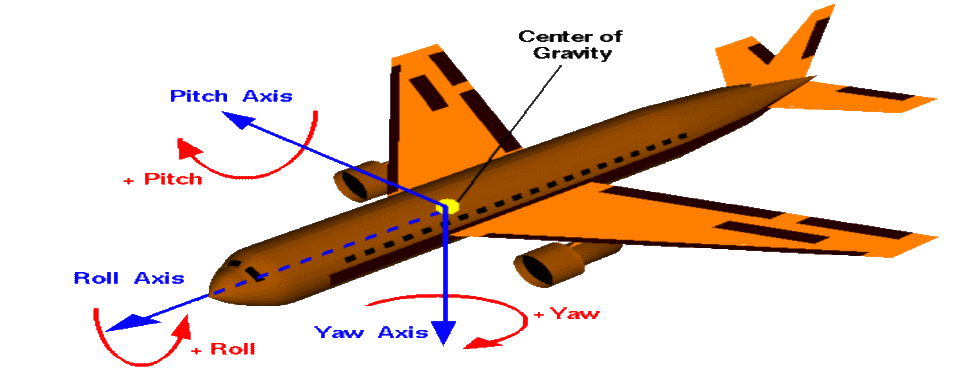
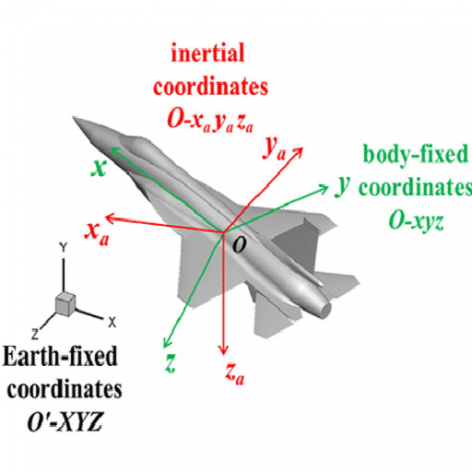
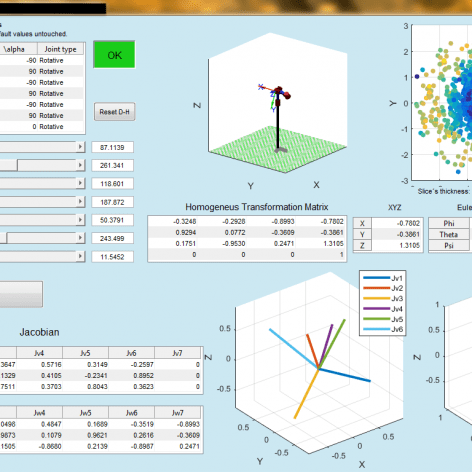
این پست مربوط به جلسات مجموعه آموزشی پایداری و کنترل هواپیما است. اصطلاح انگلیسی این عبارت Aircraft Stability and Control است. به منظور بررسی این بخش، نیازمند مطالعه بر روی مدل سیستم هستیم که در پست مدلسازی و شبیه سازی 6 درجه آزادی هواپیما به طور کامل و به تفصیل شرح داده شده است. به کمک مدل استخراج شده، بحث های مربوط به این مجموعه که شامل بررسی پایداری استاتیکی و دینامیکی، مانورپذیری، سیستم های کنترل پرواز، اتوپایلوت و طراحی کنترلر برای هواپیما است، ارائه شده است. انجام تمامی روند، از مدلسازی و استخراج معادلات ۶ درجه آزادی تا شبیه سازی و حل معادلات دیفرانسل غیرخطی و نیز کنترل هواپیما در نرم افزار متلب Matlab و سیمولینک simulink صورت گرفته است.
پایداری هواپیما شامل دو بخش پایداری استاتیکی و دینامیکی بوده و به ترتیب عبارت است از تمایل ذاتی هواپیما در مخالفت با هر گونه اغتشاش داخلی (دستورات خلبان) یا بازگشت به حالت تعادل اولیه پس از برخورد هر گونه اغتشاش خارجی (تلاطمات جوی و باد). در پایداری استاتیکی اغلب ضرایب ایرودینامیکی مورد تحلیل قرار گرفته اما در پایداری دینامیکی (همان طور که از نام آن مشخص است) با تحلیل دینامیک سیستم (که در طول زمان وضعیت آن مشخص می شود) و استخراج معادله مشخصه و ریشه های آن به بررسی پایداری پرداخته می شود.
در بحث کنترل،انواع سیستم های کنترل پرواز و اتوپایلوت توضیح داده شده است. طراحی کنترلر نیز با ایجاد تغییر در ورودی های کنترلی که شامل تغییرات زوایای الویتور، ایلرون، رادر و تغییرات دسته گاز (تراتل موتور) است، انجام می شود.
جلسه اول :
در این جلسه که اولین جلسه از مجموعه آموزشی “پایداری و کنترل هواپیما” است، به توضیح و ارائه تعریفی از پایداری استاتیکی و دینامیکی پرداخته شده است.
جلسه دوم :
در این جلسه که دومین جلسه از مجموعه آموزشی “پایداری و کنترل هواپیما” است، به توضیح پایداری استاتیکی و دینامیکی عرضی- سمتی می پردازیم.
جلسه سوم :
در این جلسه که سومین جلسه از مجموعه آموزشی “پایداری و کنترل هواپیما” است، به توضیح سیستم های کنترل پرواز می پردازیم.
- لینک دانلود فایل بلافاصله بعد از پرداخت وجه به نمایش در خواهد آمد.
- همچنین لینک دانلود به ایمیل شما ارسال خواهد شد به همین دلیل ایمیل خود را به دقت وارد نمایید.
- ممکن است ایمیل ارسالی به پوشه اسپم یا Bulk ایمیل شما ارسال شده باشد.
- در صورتی که به هر دلیلی موفق به دانلود فایل مورد نظر نشدید با ما تماس بگیرید.

An able man
سلام چگونه میتونیم نمونه آموزش شما رو ببینم تا بتونم برای خریدش اقدام کنم
مدیر سایتادمین سایت
سلام نمونه همه آموزش ها در پست مربوطه وجود داره. کافیه در قسمت توضیحات جاهایی که نوشته شده برای توضیحات بیشتر و دیدن پیش نمایش کلیک کنید، روی این جمله کلیک کنید تا پیش نمایش ها ظاهر بشن
عطیه
با سلام و خسته نباشید
دو روز پیش جلسه سوم این فایل اموزشی رو خریدم اما ادرس ایمیلم رو اشتباه وارد کردم و به جای yahoo.com@ نوشتم yahyoo.com@.
الان من باید چکار کنم؟ به ادرس تلگرامیتون هم مراجعه کردم و گفتم چی شده ولی تا الان کسی جوابمو نداده!
مهندس رشیدی
سلام. پاسخی دریافت کردید؟
atieh eskandari
سلام. جلسه سوم این مبحث رو خریداری کردم اما هیچ لینک دانلودی برام ارسال نشد! الان من باید چکار کنم؟؟؟
مهندس رشیدی
دریافت کردید؟