 مرجع مهندسی كنترل | دانش با کیفیت در مرز علم
مرجع مهندسی كنترل | دانش با کیفیت در مرز علم
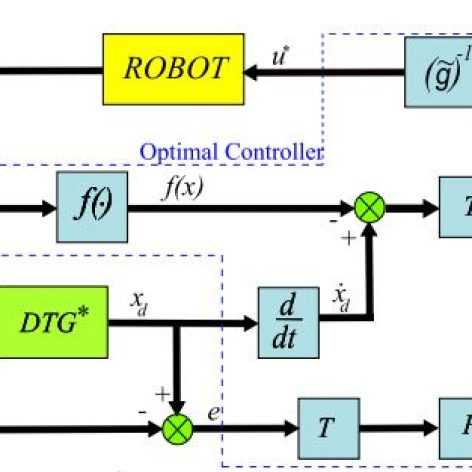
شبیه سازی مقاله ژورنال Asian Journal of Control سال 2013 Wiley Online Library Global Optimal Feedback‐Linearizing Control of Robot Manipulators کنترل…
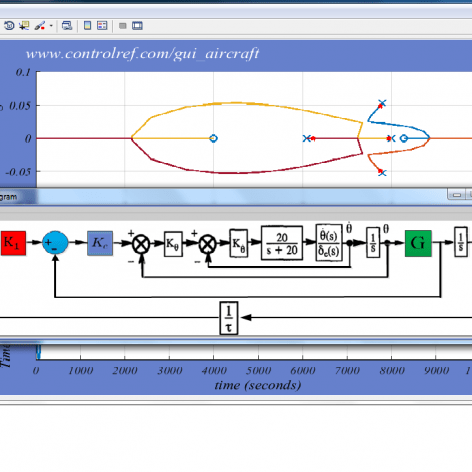
مباحثی که خدمت شما بزرگواران ارائه می شود، مربوط به کنترل هواپیما است که از پارت دوم از کتاب Roskam تدریس شده…

واسط های گرافيکي که در این قسمت ارائه شده است، مربوط به درس فیلتر کالمن از کتاب DanSimon است که دوست خوبم…
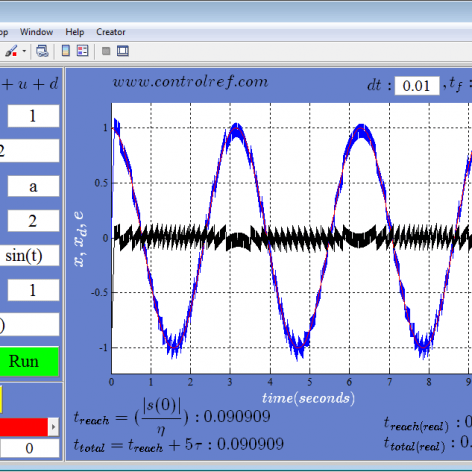
در اينجا، يک واسط گرافيکي و يا guiيي در متلب توليد شده که با استفاده از آن به طور اتوماتیک مي توانید…

در اينجا، يک واسط گرافيکي و يا guiيي در متلب توليد شده که با استفاده از آن براحتي مي توان يک کنترل کننده PID براي يک سيستم طراحي کرد که در پروژه هاي دانشجويي مي تواند بسيار کمک کننده باشد. اين gui ميتواند بدون استفاده از روش هاي کلاسيک، يک کنترل کننده PID تروتميز را در اختيار دانشجويان قرار دهد.
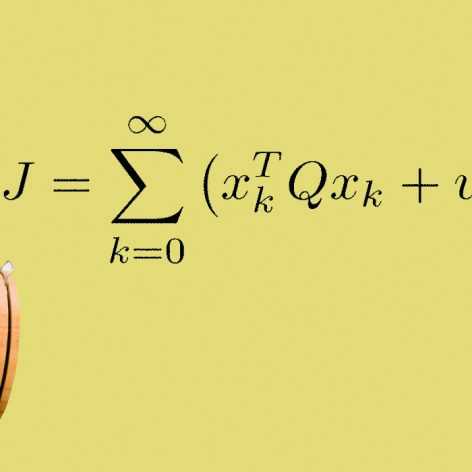
کنترل بهینه دارای تعارف جدید و روش های ریاضی پیچیده ای برای حل مسائل است. مرجع مهندسی کنترل سری آموزش بهینه را برای شما آماده کرده است.

تاخیر زمانی در بسیاری از سیستمها باعث کاهش عملکرد و یا حتی باعث ناپایداری میشود و بنابراین باید در مدل درنظر گرفته شود. سیستمهای مکانیکی، بیولوژیکی، شبکه های کامپیوتری، شبکه های عصبی و رباتیک جزو این دسته هستند.
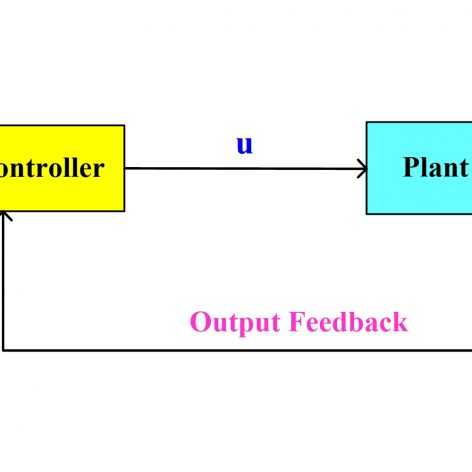
در واقع LQG از یک کنترلکننده بهینه LQR و یک فیلتر کالمن تشکیل شده است که فیلتر کالمن از خروجیهای سیستم تخمین حالتها را در هر لحظه محاسبه کرده و در اختیار کنترلکننده LQR قرار میدهد.
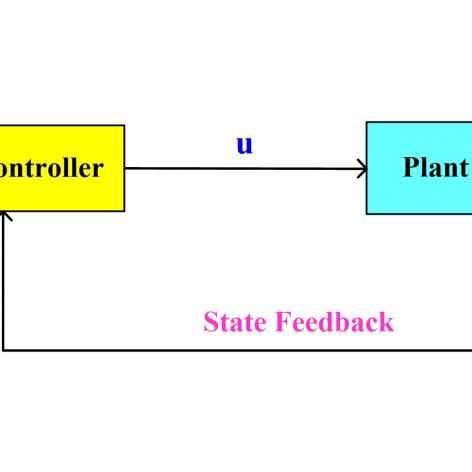
کنترل بهینه (Optimal Control) به عنوان یکی از روشهای مدرن کنترلی، جایگاه ویژهای در بحث سیستمهای کنترل دارد. یکی از روشهای کنترلی بهینه رگولاتور درجه دوم خطی (Linear Quadratic Regulator) است که به اختصار LQR خوانده میشود.
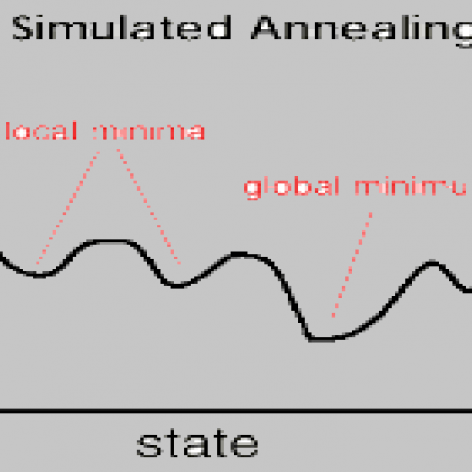
برخي مسائل بهينهسازي صنعتي در ابعاد واقعي غالباً پيچيده و بزرگ ميباشند. بنابراين روشهاي حل سنتي و استاندارد، كارايي لازم را نداشته و عموماً مستلزم صرف زمانهاي محاسباتي طولاني هستند.
بطور کلی روش حساب تغییرات به مساله غیر خطی با شرایط حدی در دو نقطه مجزا منتهی می شود که برای بدست آوردن قانون کنترل بهینه و یا حتی یک کنترل بهینه حلقه باز نمی تواند بصورت تحلیلی حل شود.
