 مرجع مهندسی كنترل | دانش با کیفیت در مرز علم
مرجع مهندسی كنترل | دانش با کیفیت در مرز علم
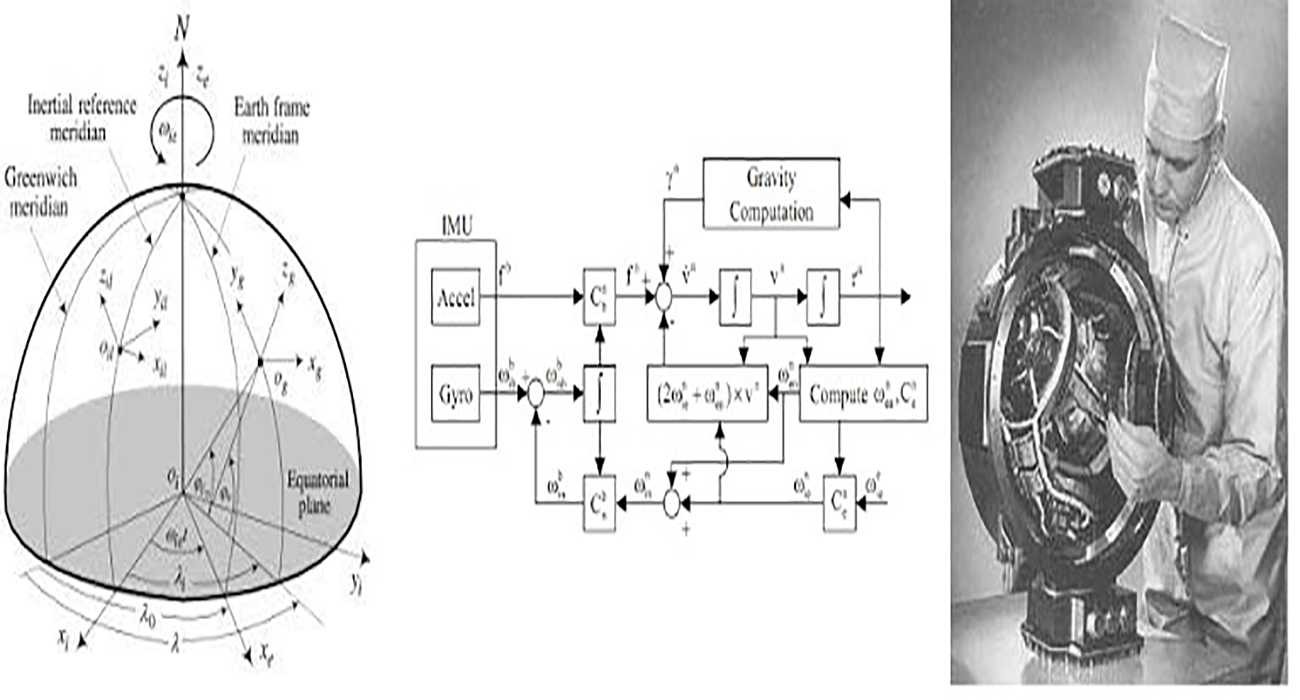
عملکرد سیستمهای ناوبری اینرسی (Inertial Navigation System : INS) بر قوانین مکانیک کلاسیک که بیان ریاضی آنها توسط نیوتن انجام شد، مبتنی است. یک سیستم ناوبری اینرسی معمولا از سه شتاب سنج و سه ژیروسکوپ استفاده می کند. شتاب سنجها قادر به اندازه گیری شتاب و ژیروسکوپها قادر به اندازه گیری سرعت زاویه ای جسم هستند. با انتگرالگیری متوالی از خروجی سنسورهای اینرسی فوق می توان موقعیت و زوایای جسم را تعیین کرد. سیستمهای ناوبری اینرسی به دو دسته کلی متصل به بدنه (Strapdown) و صفحه پایدار (Platform) تقسیم می شوند. ناوبری به طور کلی به معنی فرایند تعیین موقعیت و وضعیت یک جسم می باشد. روشهای مختلف ناوبری شامل: ناوبری اینرسی، ناوبری رادیویی (مانند جی پی اس : GPS ، گلوناس : GLONASS)، ناوبری به کمک ستاره ها (Star Tracker) و … می باشد.یکی از مراجع اصلی درس Titterton, David, and John L. Weston. Strapdown inertial navigation technology می باشد.
جلسه اول :
کلیات و مفاهیم
جلسه دوم :
مباحث مربوط به بردارها و ماتریس دوران
جلسه سوم :
ادامه بحث ماتریس دوران
جلسه چهارم :
زوایای اويلر
جلسه پنجم :
بردار دوران
جلسه ششم :
مشتق بردار و ماتریس دوران
جلسه هفتم :
ادامه مشتق ماتریس دوران و بلوک دیاگرام ناوبری در دستگاه اینرسی
قیمت اصلی: ۸۴۰,۰۰۰ تومان بود.۶۶۹,۶۰۰ تومانقیمت فعلی: ۶۶۹,۶۰۰ تومان.Add to cart



