در این پست انواع مد لغزشی مرتبه بالاتر (HOSMC) قرار داده می شود. انواع مد لغزشی مرتبه بالاتر که قرار است به صورت فیلم آموزشی در این پست قرار داده شود به صورت زیر می باشند:
- مد لغزشی مرتبه دو
- مد لغزشی دینامیک
- مد لغزشی ترمینال
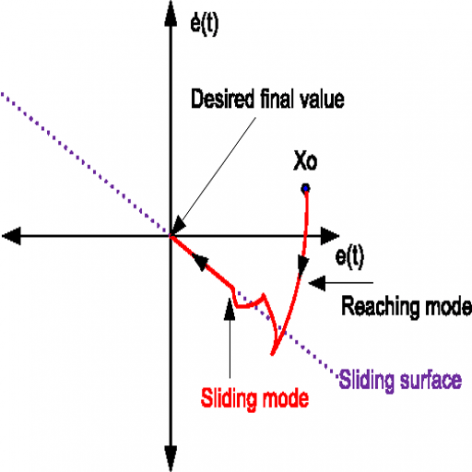
مد لغزشی کلاسیک یا معمولی یا مرتبه اول معایبی دارد که از آن جمله می توان به پدیده چترینگ، عدام طراحی برای سیستم های غیرآفین و بی نهایت بودن زمان ردیابی اشاره کرد. این معایب در مد لغزشی مرتبه بالاتر برطرف می شود. در واقع مد لغزشی مرتبه بالاتر نه تنها دارای محاسن مد لغزشی کلاسیک است بلکه باعث خطای ردیابی بهتر نسبت به مد لغزشی کلاسیم نیز می شود. سه تا از انواع پرکاربرد مد لغزشی که در اکثر مقالات اخیر به چشم می خورود مد لغزشی مرتبه دو ، مد لغزشی نهایی و مد لغزشی دینامیک می باشد. در این پست سعی شده است که این نوع از مد لغزشی همراه با شبیه سازی تشریح شود. پیش نیاز این جلسات، فیلم های آموزش مد لغزشی بر اساس کتاب اسلاتین هستش. که در صورتیکه آشنایی اولیه با مد لغزشی ندارید پیشنهاد می کنم این مجموعه رو از اینجا ببینید.
جلسه اول:
مقدمه و دسته بندی
در این جلسه به مقدمات مد لغزشی مرتبه بالا پرداخته شده است. ابتدا عیوب مد لغزشی کلاسیک به صورت مفصل بحث شده است سپس تاریخچه ای از مد لغزشی مرتبه بالاتر و اینکه ایده اولیه از کجا شروع شده و چطور پرورش پیدا کرده گفته شده است . در ادامه گفته شده که مد لغزشی مرتبه بالا چی هست و تعاریف مربوط به اون به زبان ساده بیان شده است و در نهایت انواع مد لغزشی مرتبه بالا دسته بندی شده است. این مجموعه بر اساس پایان نامه دکتری یکی از دانشجویان دکتری در یکی از دانشگاه های انگلیس گفته شده است.
مدت زمان آموزش: 47 دقیقه
محتویات دانلود: فیلم با کیفیت ۷۲۰p- پاورپوینت درس و پایان نامه مورد اشاره در فیلم
حجم محتویات دانلود: 70 مگابایت
جلسه دوم:
مد لغزشی دینامیک (Dynamic Sliding Mode)
در این جلسه به طراحی و شبیه سازی مد لغزشی دینامیک پرداخته شده است. دو روش برای طراحی سطح لغزش برای روش مد لغزشی دینامیک وجود داره. روش کنترل معادل و روش غیرمستقیم. روش دوم نیازی به این ندارد که سیستم آفین باشد و برای سیستم های غیر آفین نیز استفاده می شود و این یکی از قدرتهای روش مد لغزشی دینامیک است. پس از تشریح روش کنترل معادل، یک مثال به طور کامل بحث شده و پس از آن در نرم افزار متلب شبیه سازی شده است. از مزایای بی چون و چرای این روش حذف کامل چترینگ می باشد که این در شبیه سازی بوضوح نشان داده شده است.
مدت زمان آموزش: 69 دقیقه
محتویات دانلود: فیلم با کیفیت ۷۲۰p- پاورپوینت درس و ام فایل مثال مربوطه
حجم محتویات دانلود: 101 مگابایت
جلسه سوم:
مد لغزشی نهایی (Terminal Sliding Mode Control)
مشکل مد لغزشی دینامیک این بود که حالت ها در زمان بی نهایت به مقدار مطلوب خود می رسند. این مشکل در مد لغزشی کلاسیک نیز وجود داشت. از این جلسه به بعد در ارتباط با مد لغزشی هایی صحبت می کنیم که زمان همگرایی حالت ها به مقدار مطلوبشون محدود هست. در مد لغزشی کلاسیک سطح لغزش به صورت خطی بر حسب خطا نوشته می شد اما در این جا سطح لغزشی به صورت غیرخطی در نظر گرفته میشود. و مشکل زمان محدود نبودن را حل می کند. انواعی از مد لغزشی نهایی وجود دارد که در این جا به سه تا از مهترین آنها پرداخته شده است. مد لغزشی نهایی نرمال، مد لغزشی نهایی غیرتکین و مد لغزشی ترمینال سریع در این جلسه ارائه شده اند.
مدت زمان آموزش: 50 دقیقه
محتویات دانلود: فیلم با کیفیت ۷۲۰p- پاورپوینت درس
حجم محتویات دانلود: 70 مگابایت
جلسه چهارم:
مد لغزشی مرتبه دو (Second Order Sliding Mode Control)
ساده ترین نوع مد لغزشی مرتبه بالا، مد لغزشی مرتبه دو می باشد. که در این نوع از مد لغزشی تضمین میشود هم سطح لغزش و هم مشتق سطح لغزش صفر می شوند. الگوریتم های متفاوتی برای این نوع از مد لغزشی ارائه شده است. پنج الگوریتم در این جلسه بحث شده است. الگوریتم پیچشی، الگوریتم زیربهینه، الگوریتم تابع از قبل تعریف شده، الگوریتم رانش و الگوریتم فرا پیچشی یا سوپر تویستینگ (super twisting). در این بین الگوریتم سوپر تویستینگ طرفدار بیشتری دارد. اگه یه سرچ کوچیک توی گوگل یا ساینس دایرکت در مورد مد لغزشی مرتبه بالا بزنید خواهید دید اکثر مقالات در زمینه الگوریتم فراپیچشی هستند. بر این اساس در مورد این الگوریتم بحث بیشتری شده است.
مدت زمان آموزش: 59 دقیقه
محتویات دانلود: فیلم با کیفیت ۷۲۰p- پاورپوینت درس
حجم محتویات دانلود: 80 مگابایت
جلسه پنجم:
طراحی مد لغزشی دینامیک برای یک سیستم غیر آفین
در این جلسه به طراحی مد لغزشی دینامیک برای یک سیستم غیر آفین پرداختیم. خاطر گرامیتون هست که در جلسه دوم که برای مد لغزشی دینامیک دو روش _روش کنترل معادل و روش غیرمستقیم_ گفته شد تنها برای روش کنترل معادل یک مثال حل شد و برای روش دوم به دلیل افزایش حجم فیلم ، مقدور نبود که مثال حل بشه. در این جلسه به صورت مجزا برای سیستم های غیرآفین با استفاده از مد لغزشی دینامیک، کنترل کننده طراحی شده است. مثالی که در این جلسه در نظر گرفته شده است دارای دو متغیر حالت است که دینامیک داخلی پایداری دارد. پایداری دینامک صفر یا دینامیک داخلی بررسی شده است و سپس کنترل کننده طراحی شده و در نهایت در نرم افزار متلب شبیه سازی شده است. امیدوارم از این آموزش لذت ببرید.
مدت زمان آموزش: 48 دقیقه
محتویات دانلود: فیلم با کیفیت ۷۲۰p- پاورپوینت درس و ام فایل مربوطه
حجم محتویات دانلود: 74 مگابایت
۸۴۰,۰۰۰ تومان قیمت اصلی: ۸۴۰,۰۰۰ تومان بود.۵۹۷,۶۰۰ تومانقیمت فعلی: ۵۹۷,۶۰۰ تومان.Add to cart
مطالعه بیشتر
 مرجع مهندسی كنترل | دانش با کیفیت در مرز علم
مرجع مهندسی كنترل | دانش با کیفیت در مرز علم





الهه
سلام برای استفاده از الگوریتم ژنتیک در تعیین پارامتر K میشه راهنمایی بفرمایید..
و یا اینکه اگر اموزش و یا منبعی سراغ دارین ممنون میشم ارجاع بفرمایید
مدیر سایتادمین سایت
سلام
براحتی میتونید الگوریتم ژنتیک رو استفاده کنید. فکر میکنم مهندس بابایی توی سایتمون این آموزش رو قرار دادن
Rezaie
باسلام؛درمورد طراحی مد لغزشی مرتبه دوم با الگوریتم فراپیچشی برای سیستم غیر آفرین مطلبی دارید؟
این
مدیر سایتادمین سایت
سلام
نیازی نیست که سیستم آفین باشه. از همین آموزشی که توی سایت هست استفاده کنید
elaheh
با سلام و وقت بخیر
ببخشید میشه لطف بفرمایید برای مدلغزشی فراپیچشی چندتا رفرنس معرفی کنید؟
ممنون
مدیر سایتادمین سایت
سلام. همونطوری که توی فیلمها عرض کردم اگه بخواید برید رفرنس اصلی مد لغزشی فراپیچشی رو یادبگیرید که باید بین سه تا شش ماه وقت بذارید تا بفهمید چی گفته!
چون نیاز به ریاضیات ویژه ای داره. اما اگه بخواید کاربردشو بدونید از همینهایی که توی فیلم گفتم استفاده کنید. برای رفرنس هم باید سرچ کنید و مقالات مشابه با کار خودتون رو پیدا کنید.
فکر میکنم سال 2008 بود که یک نفر یک تابع لیاپانوف رو برای اولین بار برای مد لغزشی فراپیچشی ارائه کرد. اون هم رفرنس خوبی میتونه برای کارتون باشه
پوریا
سلام تو روش مد لغزشی چرا ما یه سیستم مرتبه n رو به مرتبه های یک تبدیل میکنیم؟ممنون
مدیر سایتادمین سایت
@پوریا,
سلام. این سوال شما در مجموعه آموزشی مد لغزشی بر اساس کتاب اسلوتین به طور مفصل توضیح داده شده است.
ahmadkhalil
با سلام
دو سوال داشتم
1-در کنترل مد لغزشی دینامیکی، در حالتی که نامعینی در سیستم وجود دارد و شما از روش غیر مستقیم برای بدست آوردن مشتق ورودی کنترلی استفاده می کنید، مشتق نامعینی ها هم در معادله مشتق سطح لغرش ظاهر می شود که کار را بسیار سخت می کند، چرا که شاید به راحتی نتوان حدودی برای آنها مشخص کرد؟ آیا تصور من درست است؟ اگر چنین است، چه راهکاری برای آن وجود دارد، در مقالات که جستجو کردم از رویتگر برای بدست آوردن این ترم ها استفاده می کنند، اما این راه به نظر من راه کاربردی نمی باشد!
2- در حالتی که نامعینی در سیستم وجود دارد و شما از روش u معادل برای بدست آوردن مشتق ورودی کنترلی استفاده می کنید، نامعینی ها چگونه در معادله مشتق سطح لغرش ظاهر می شوند؟
ممنون
مدیر سایتادمین سایت
@ahmadkhalil,
@ahmadkhalil,
سلام
۱- مشکل اصلی مد لغزشی دینامیک همینه و در صورتیکه اغتشاش یا نامعینی داشته باشیم به مشکل بر می خورند. اما اینکه روی اغتشاش و مشتقاتش محدودیت بذاریم کار غلطی نیست و مقالات بسیار زیادی وجود دارند که اینکارو می کنن. ضمن اینکه خیلی دوست دارم دلیلتون رو بابت اینکه اگه نامعینی رو تخمین بزنیم کار غلطی هست رو بدونم. تخمین اغتشاش و نامعینی اتفاقا کار رو خیلی ساده میکنه. و راه حل منطقی و معقولی هست اگه دلیلی دارید بفرمایید تا روش بحث کنیم
۲- در این روش نمیتونید مستقیما این کار رو انجام بدید. البته من راه حلی به ذهنم رسیده که احتمالا در آینده نزدیک مقالاتشو هم ارسال میکنم. اگر وقت نشد به عنوان فیلم آموزشی در سایت قرار میدم. (ممکنه حداقل یکسال طول بکشه!)
Majid
با عرض سلام
می خواستم در مورد تعمیم مد لغزشی مرتبه دوم به سیستم های MIMO بپرسم که آیا مقالات یا مراجعی هستن که این مورد رو ساده تر و بهتر توضیح داده باشن. چون اکثر مطالبی که خوندم سیستم های MIMO را با یک سری فرضیات و برای حالت های ساده تر کنترل کردن و اینکه درک متن و روابطشون سخته.
مدیر سایتادمین سایت
@Majid,
سلام. نه متاسفانه
zahra
با سلام
من کنترل مد لغزشی دینامیکی خریداری کردم ولی اصلا برای من دانلود نمیشه
مدیر سایتادمین سایت
@zahra,
سلام
درستش کردم. لطفا مجددا دانلود کنید
تشکر
مهیار
با سلام به اقای دکتر موسوی پور
اقای دکتر لطف کنید مباحث مد لغزشی رو گشترش و مباحث بیشتری رو باز کنید تا بتوانیم برای تز های مختلف خودمون با توجه به فیلم های بسیار عالی شما اونها رو انجام و یاد بگیریم .
ممنون از شما
علی
سلام
ممنون از اموزشتون
یه سوال اگه بخوام برا خودم شکل هندسی (phase plane) الگوریتم فراپیچشی را رسم کنم باید چی بزنم تو متلب؟الان هم تابع s را دارم هم sdot
مدیر سایتادمین سایت
@علی,
سلام کافیه همون s و sdot رو بر حسب هم رسم کنید نیازی به دستور خاصی نیست
قادری
خدمت اساتید گرامی سلام و عرض ادب دارم
بنده با دیدن فیلم های آموزش مود لغزشی، خوشبختانه توانستم پایان نامه ام با موضوع ردیابی نقطه ماکزیمم توان در توربین بادی مبتنی بر ژنراتور سنکرون مغناطیس دادم از طریق کنترل مد لغزشی را با نحو احسن به اتمام برسانم.
شبیه سازیها کلا در محیط Mfile متلب است و نتایج عالی می باشند. فقط یک سوال مهم در ذهنم باقی است که هنوز جواب درستی برایش نیافتم.
همانطور که می دانیم در طراحی کنترل مود لغزشی ما پس از طی چندین مراحل سیگنال کنترلی U را بدست می آوریم که سیستم توسط آن کنترل میشود،
حال سوال این است، در عمل و دنیای واقعی این سیگنال کنترلی به کجای سیتم اعمال می شود؟
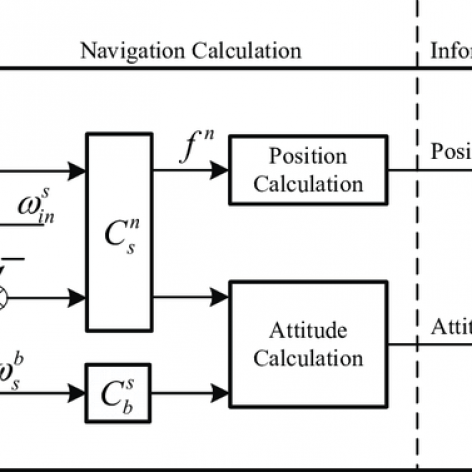
و اگر من بخواهم بصورت یک بلوک دیاگرام توربین بادی حاوی PMSG را با سیتسم کنترلی فوق نشان دهم، محل این کنترل کننده کجاست و به چه نحوی بر روی سیستم قابل پیاده سازی می باشد( سیستم مستقل از شبکه است و فقط به یک بار متصل است)
توضیح این که جریان خروجی PMSG به عنوان سیگنال کنترلی U در نظر گرفته شده است
با تشکر و سپاس فراوان
مدیر سایتادمین سایت
@قادری,
سلام
ورودی کنترلی بسته به سیستم از جنس های مختلف می تونه باشه و به دو صورت مکانیکی و الکتریکی می تونه ساخته بشه در نوع مکانیکی ممکنه از جرم و فنر و دمپر استفاده کنند و در نوع الکتریکی از مقاومت خازن آپ امپ و …و روی یک چیپ ساخته بشه که ورودی اون چیپ اندازه گیری هایی باشد که از سنسورها می آیند و خروجی کنترل کننده هم به سیستم اعمال می شود
سپاسگزارم