 مرجع مهندسی كنترل | دانش با کیفیت در مرز علم
مرجع مهندسی كنترل | دانش با کیفیت در مرز علم

عملکرد سیستمهای ناوبری اینرسی (Inertial Navigation System : INS) بر قوانین مکانیک کلاسیک که بیان ریاضی آنها توسط نیوتن انجام شد، مبتنی است. یک سیستم ناوبری اینرسی معمولا از سه شتاب سنج و سه ژیروسکوپ استفاده می کند. شتاب سنجها قادر به اندازه گیری شتاب و ژیروسکوپها قادر به اندازه گیری سرعت زاویه ای جسم هستند. با انتگرالگیری متوالی از خروجی سنسورهای اینرسی فوق می توان موقعیت و زوایای جسم را تعیین کرد. سیستمهای ناوبری اینرسی به دو دسته کلی متصل به بدنه (Strapdown) و صفحه پایدار (Platform) تقسیم می شوند. ناوبری به طور کلی به معنی فرایند تعیین موقعیت و وضعیت یک جسم می باشد. روشهای مختلف ناوبری شامل: ناوبری اینرسی، ناوبری رادیویی (مانند جی پی اس : GPS ، گلوناس : GLONASS)، ناوبری به کمک ستاره ها (Star Tracker) و … می باشد.یکی از مراجع اصلی درس Titterton, David, and John L. Weston. Strapdown inertial navigation technology می باشد.
جلسه اول :
کلیات و مفاهیم
جلسه دوم :
مباحث مربوط به بردارها و ماتریس دوران
جلسه سوم :
ادامه بحث ماتریس دوران
جلسه چهارم :
زوایای اويلر
جلسه پنجم :
بردار دوران
جلسه ششم :
مشتق بردار و ماتریس دوران
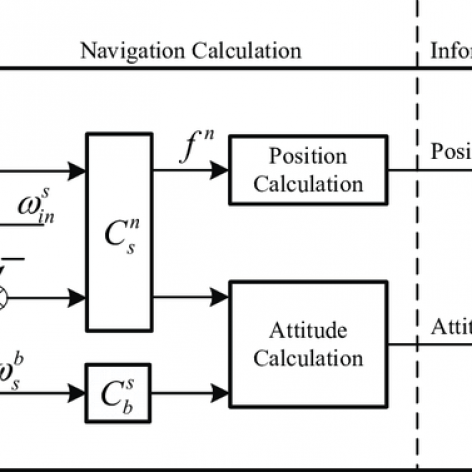
جلسه هفتم :
ادامه مشتق ماتریس دوران و بلوک دیاگرام ناوبری در دستگاه اینرسی
- لینک دانلود فایل بلافاصله بعد از پرداخت وجه به نمایش در خواهد آمد.
- همچنین لینک دانلود به ایمیل شما ارسال خواهد شد به همین دلیل ایمیل خود را به دقت وارد نمایید.
- ممکن است ایمیل ارسالی به پوشه اسپم یا Bulk ایمیل شما ارسال شده باشد.
- در صورتی که به هر دلیلی موفق به دانلود فایل مورد نظر نشدید با ما تماس بگیرید.




حسین
متشکرم
مدیر سایتادمین سایت ( مالک تایید شده )
دوست عزیز همه لینکها کار میکنه و مشکلی وجود ندارد. لطفا مجددا با همون لینکهایی که در اختیارتون قرار داده شده دانلود بفرمایید.
محمدحسین یوسفی
سپاس از شما جناب دکتر رئوف بابت به اشتراک گذاشتن مطالب بسیار عالی و مفید.