 مرجع مهندسی كنترل | دانش با کیفیت در مرز علم
مرجع مهندسی كنترل | دانش با کیفیت در مرز علم

حتمالا برای شما هم پیش اومده که در یک مقاله یا کتاب به جایی رسیدید که باید یک ناتساوی ماتریسی خطی (یا LMI) رو حل کنید و در بدر دنبال یک نفر هستید تا در کوتاهترین زمان ممکن حل این نوع ناتساوی ها رو به شما یاد بده تا مجبور نباشید زمان قابل توجهی صرف کنید و از منابع مختلف دنبال راه حل باشید. اگر شما هم جزو این دسته از محققین هستید دیگه نگران نباشید. در این پست قراره تمام جزییات و کلیات نامساوی ماتریسی خطی (و حتی غیرخطی) با نحوه حل اونها در متلب و با دو روش تولباکس متلب و YALMIP به روش ساده و با مثالهای مفصل توضیح داده بشه. اگر با این فیلمهای آموزشی همراه شده و مرحله به مرحله مثالها رو پیش برید بعد از این ۱۱ جلسه قادر خواهید بود حل کننده (solver) مناسب رو برای مساله خودتون انتخاب کرده و ناتساویهای ماتریسی خودتون رو باهاش حل بکنید. بعد از تشریح کامل دو روش بالا یک مثال از طراحی کنترل کننده برای سیستم شناور مغناطیسی از یک مقاله IEEE با استفاده از LMI خدمت شما ارایه میشه (به همراه شبیه سازی در محیط سیمولینک) تا مطلب کامل جا بیافته. با ما همراه باشید…
پیشنیازها: آشنایی اولیه با جبر خطی و تئوری سیستمهای کنترل خطی – آشنایی با کدنویسی در محیط متلب
جلسه اول:
مقدمات ریاضی و تعریف ناتساوی های ماتریسی
جلسه دوم:
تعیین متغیرهای ماتریسی و وارد کردن جملات LMI در تولباکس متلب
جلسه سوم:
معرفی دستور feasp تولباکس متلب جهت حل LMI
جلسه چهارم:
معرفی دستورات mincx و gevp تولباکس متلب جهت حلمسایل مینیممسازی
جلسه پنجم:
طراحی کنترل کننده فیدبک حالت برای سیستم خطی و حل LMI های آن با تولباکس متلب
جلسه ششم:
معرفی تولباکس یالمیپ برای حل LMI و نجوه دانلود و نصب آن
جلسه هفتم:
تعریف متغیرهای ماتریسی و قیدها با استفاده از تولباکس یالمیپ
جلسه هشتم:
تعریف تابع هزینه و حل LMI با استفاده از تولباکس یالمیپ
جلسه نهم:
معرفی و تشریح نحوه دانلود و نصب سه solver پرکاربرد به نامهای PENBMI ، SDPT3 و MOSEK
جلسه دهم:
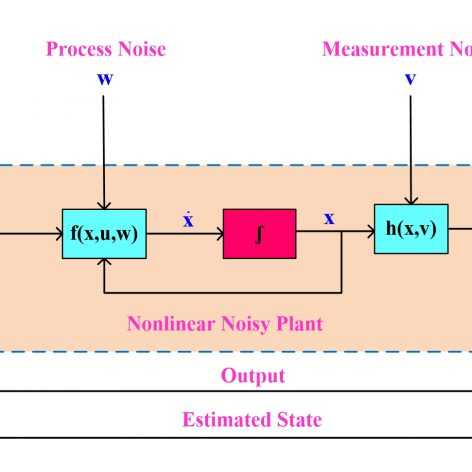
معرفی دینامیک غیرخطی قطار مغناطیسی شناور و خطیسازی حول نقطه کار
جلسه یازدهم:
طراحی و شبیهسازی فیدبک حالت برای سیستم شناور مغناطیسی
- لینک دانلود فایل بلافاصله بعد از پرداخت وجه به نمایش در خواهد آمد.
- همچنین لینک دانلود به ایمیل شما ارسال خواهد شد به همین دلیل ایمیل خود را به دقت وارد نمایید.
- ممکن است ایمیل ارسالی به پوشه اسپم یا Bulk ایمیل شما ارسال شده باشد.
- در صورتی که به هر دلیلی موفق به دانلود فایل مورد نظر نشدید با ما تماس بگیرید.






دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.