 مرجع مهندسی كنترل | دانش با کیفیت در مرز علم
مرجع مهندسی كنترل | دانش با کیفیت در مرز علم
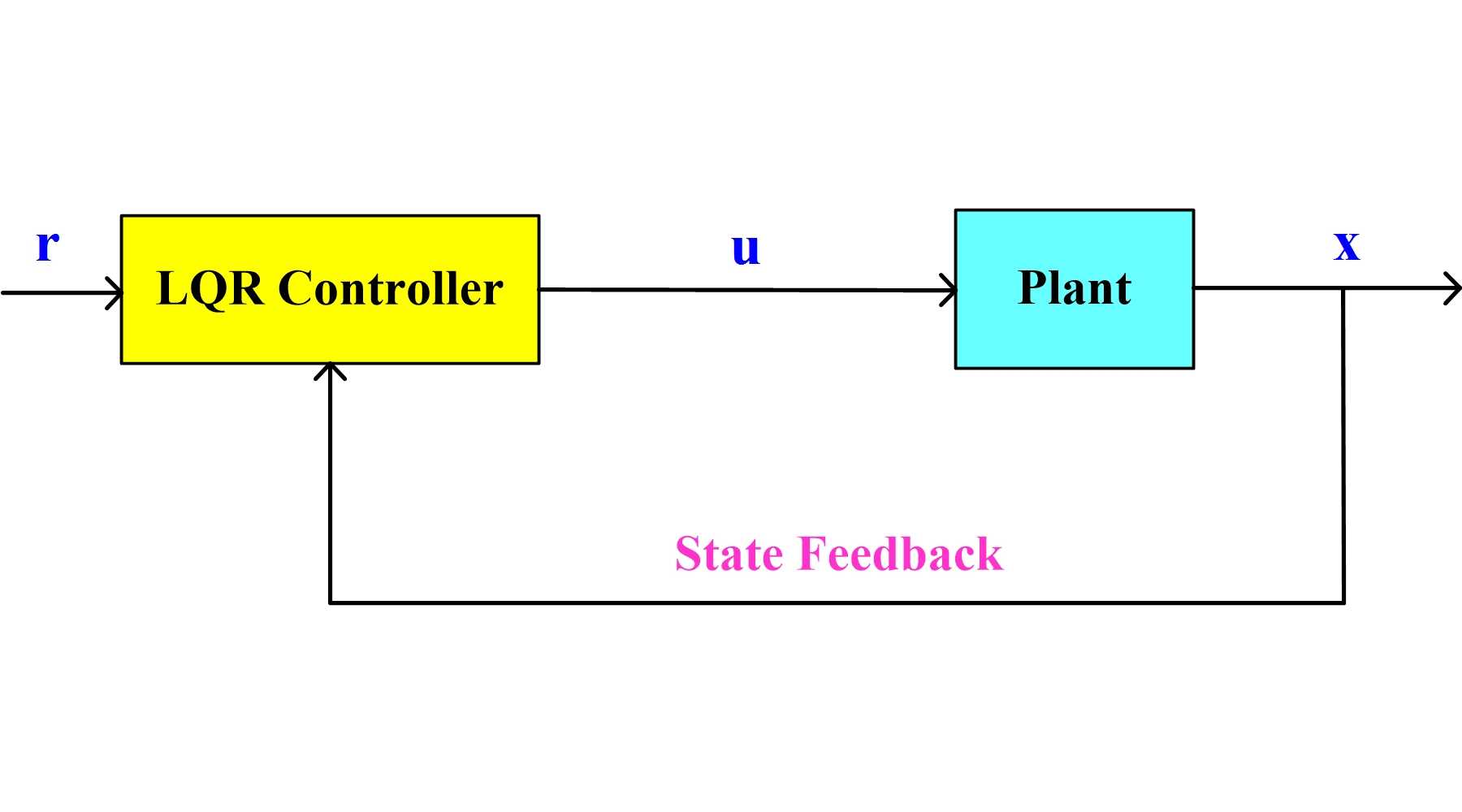
کنترل بهینه (Optimal Control) به عنوان یکی از روشهای مدرن کنترلی، جایگاه ویژهای در بحث سیستمهای کنترل دارد. یکی از روشهای کنترلی بهینه رگولاتور درجه دوم خطی (Linear Quadratic Regulator) است که به اختصار LQR خوانده میشود. این روش برای سیستمهای خطی بهینه بوده و با توجه به روند سرراست طراحی و سادگی ساختار آن در کاربردهای فراوانی با موفقیت مورد استفاده قرار گرفته است. با اینکه روش LQR تنها برای سیستمهای خطی بهینه بوده و پایداری سیستم را تضمین میکند، با استفاده از خطیسازی ژاکوپی، میتوان آنرا به سیستمهای غیرخطی نیز اعمال کرد؛ هرچند در اینصورت کنترلکننده دیگر بهینه نیست اما در بسیاری از کاربردها عملکرد خوبی از خود نشان میدهد. در این مجموعه آموزشی نحوه طراحی و پیادهسازی کنترلکننده LQR برای سیستمهای خطی و غیرخطی در محیط نرمافزار متلب آموزش داده میشود.
پیشنیاز: آشنایی اولیه با نرم افزار متلب – تئوری سیستمهای خطی
جلسه اول:
معرفی سیستمهای کنترل بهینه LQR و دستورات متلب
جلسه دوم:
طراحی و شبیهسازی کنترلکننده بهینه LQR برای سیستم گوی و میله

جلسه سوم:
طراحی کنترلکننده بهینه LQR برای سیستمهای غیرخطی و پیادهسازی بر روی سیستم شناور مغناطیسی

- لینک دانلود فایل بلافاصله بعد از پرداخت وجه به نمایش در خواهد آمد.
- همچنین لینک دانلود به ایمیل شما ارسال خواهد شد به همین دلیل ایمیل خود را به دقت وارد نمایید.
- ممکن است ایمیل ارسالی به پوشه اسپم یا Bulk ایمیل شما ارسال شده باشد.
- در صورتی که به هر دلیلی موفق به دانلود فایل مورد نظر نشدید با ما تماس بگیرید.





مرصاد
سلام من دنبال یه آموزش برای حل یه مسئله Finite horizon با کد نویسی توی متلب هستم. میخواستم بدونم در این آموزش آیا مسئله Finite horizon هم حل شده یا که فقط مسئله زمان نا محدود با همون فانکشن lqr خود متلب حل شده.
متشکر
دکتر علی جوادی
سلام
در این مجموعه دستورات آماده متلب فقط بحث شده
هادی
سلام، ممنون از آموزش های بسیار کاربردی تان.
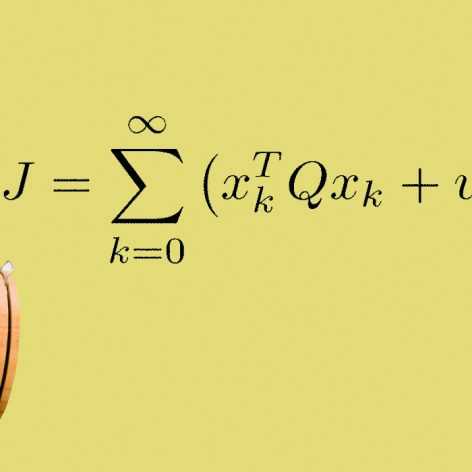
در مقالاتی که تابع هزینه مربعی را مینیمم سازی می کنند، اگر روشی را بتوان پیاده سازی کرد که این ضرایب را به صورت متغیرهای تصمیم گیری در نظر بگیرد و از این طریق، تابع هزینه را کاهش دهد، آیا می توان این نتایج را با نتایج تابع هزینه به ازای Q و R ثابت مقایسه کرد؟
بهتر است این گونه بیان کنم که متغیر در نظر گرفتن Q و R، حسن به حساب می آید یا خیر؟
با سپاس
alij63@gmail.com
سلام
اگر با تنظیم این ماتریسها به تابع هزینه کمتری برسیم، قطعا کار با ارزشی است
Amir
سلام من کانادا هستم چطوری میتونم تهیه کنم؟
مدیر سایتادمین سایت ( مالک تایید شده )
سلام و وقت بخیر
حساب ریالی ندارید؟
حامد
سلام جناب دکتر جوادی .ممنون از ویدیوهای بسیار کاربردی . با توجه به اینکه من در زمینه طراحی کنترل غیر خطی کار می کنم . ممکنه ایمیلی از شما داشته باشم
علی جوادی
سلام
در زمینه کنترل غیرخطی به دکتر موسی پور مراجعه کنید که تخصصشون هست.
علی جوادی
اقدام شد
رز
سلام لطفا بنده رو راهنمایی کنید. آیا تفاوت تاثیر زمان نهایی محدود یا زمان نهایی مشخص در حل LQR در این فیلم ها مشخص میگردد؟ در کدام جلسه ؟ دقیقتر اگر بپرسم آیا tf در محاسبه ی ضرایب کنترلی تاثیری دارد ؟ با تشکر
علی جوادی
سلام
بله. در حل معادله ریکاتی تاثیر داره. همون جلسه اول رو ببینید
امیرعلی
سلام وقت بخیر. ببخشید من میخوام برای پایان نامه م از روش کنترلی LQR استفاده کنم. برای همین میشه لطف کنید بفرمایید این فایلها برای شروع و آشنایی با این روش خوب هست یا خیر و کدوم فایل مناسبتر هست که خریداری کنم؟ با توجه به اینکه هنوز هیچ آشنایی با این روش ندارم.
ممنون
علی جوادی
سلام.
من سعی کردم طوری مطالب رو ارائه کنم که کاملا کاربردی باشه و با اینکه کدنویسی و مثال داره، همه چیز خلاصه توضیح داده بشه.
به نظرم بهتره کل مجموعه رو تهیه کنید تا سوالی براتون باقی نمونه