همونطور که میدونید در سیستمهایی که با کنترل کننده فیدبک حالت پایدارسازی انجام میشه، باید تمامی حالتها اندازهگیری شده و در دسترس باشند. در برخی از سیستمهای کنترل، امکان به کارگیری کنترل کننده فیدبک حالت وجود نداره. حداقل دو دلیل برای این مساله وجود داره:
- شاید بعضی متغیرهای فیزیکی قابل اندازهگیری نباشند یا با دقت مورد نظر نشه اندازه گیری کرد.
- اندازهگیری تمام حالتها نیاز به سنسورهای فراوان (به تعداد حالتها) داشته و عملا هزینه سیستم کنترل رو افزایش میده بنابراین شاید بلحاظ اقتصادی به صرفه نباشه که همه حالتها رو اندازه گرفت.
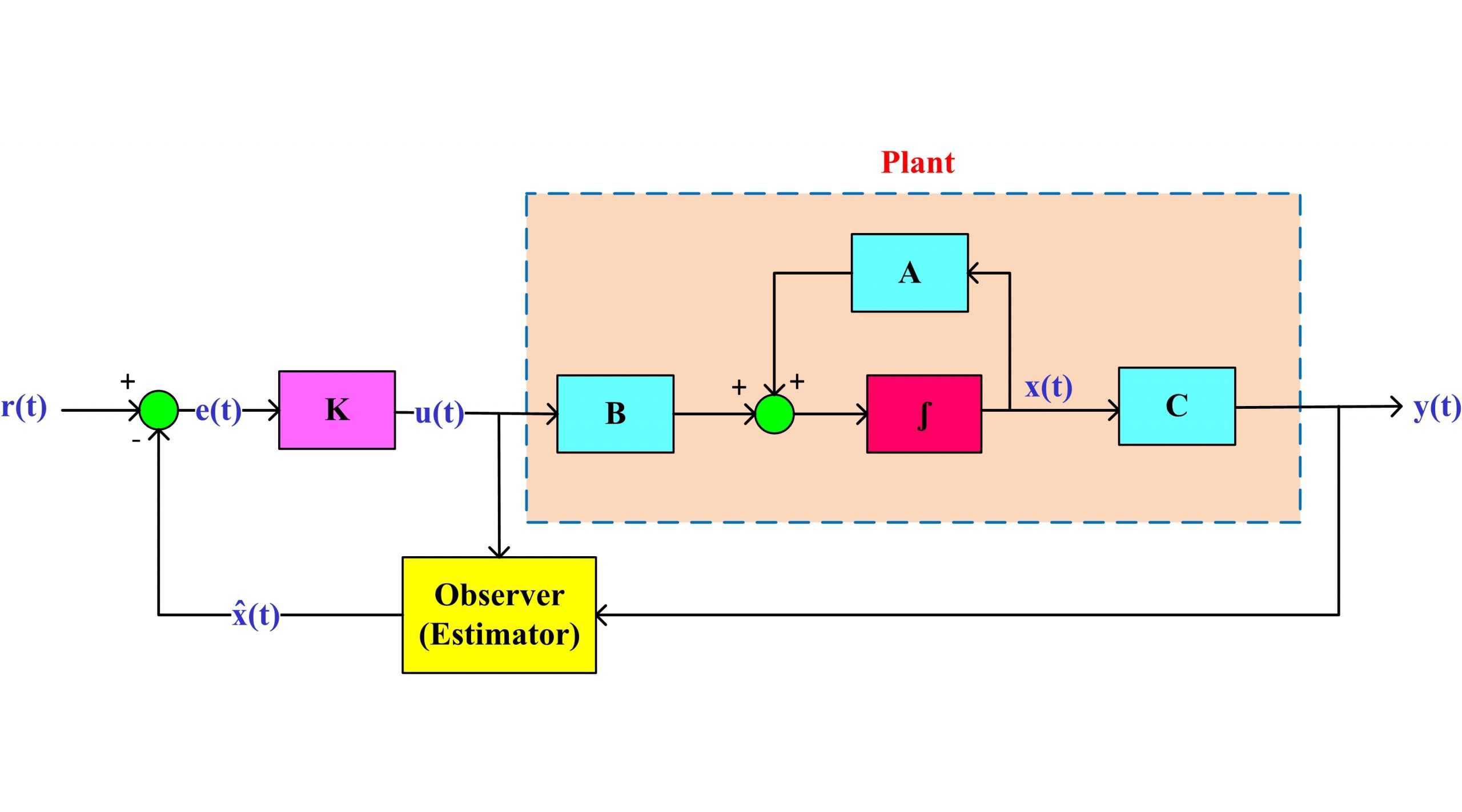
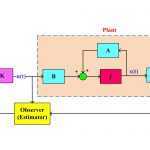
بنابراین باید سیستم کنترل رو بنحوی اصلاح کرد تا بتونه با اندازهگیری های کمتر هم بتونه سیستم رو پایدار کنه و به عملکرد مطلوب برسه. راه حل استفاده از کنترل فیدبک خروجیه که از یک رویتگر (یا تخمینگر) استفاده میکنه تا حالتها رو تخمین بزنه. رویتگر لیونبرگر به عنوان یکی از رویتگرهای خطی، یک دینامیک شبیه دینامیک خود سیستم تحت کنترل هستش که ورودی و خروجی سیستم بعلاوه پارامترهای سیستم رو دریافت کرده و تخمین حالتها رو محاسبه میکنه. البته رویتگرهایی هم وجود دارند که فقط ورودی ویا فقط خروجی سیستم رو دریافت میکنند و حالتها رو تخمین میزنند ولی عموما عملکرد خوبی ندارند و به ندرت از اونها استفاده میشه.
در این سری فیلمها قراره رویتگرهای لیونبرگر مرتبه کامل و مرتبه کاهش یافته به همراه کنترل کننده متناسب با هر کدوم به گونهای طراحی بشن که همزمان هم پایداری سیستم حلقه بسته تضمین بشه و هم تخمین حالتها به خود حالتها همگرا بشه. برای این کار از روش مستقیم لیاپونوف مساله به چند تا نامساوی ماتریسی خطی (LMI) تبدیل میشه که در صورت حلپذیری اونها، بهره کنترل کننده و رویتگر هر دو محاسبه میشن. در نهایت هر دو روش بالا روی سیستم گوی و میله پیاده شده و سیستم حلقه بسته هم در محیط m-file و هم در سیمولینک شبیه سازی شده و نتایج دو سیستم کنترل باهم مقایسه میشه.
با امید به رضایت شما عزیزان…
پیشنیازها: آشنایی اولیه با جبر خطی و تئوری پایداری لیاپونوف – آشنایی با کدنویسی در محیط متلب – آشنایی با نامساویهای ماتریسی خطی (LMI)
جلسه اول:
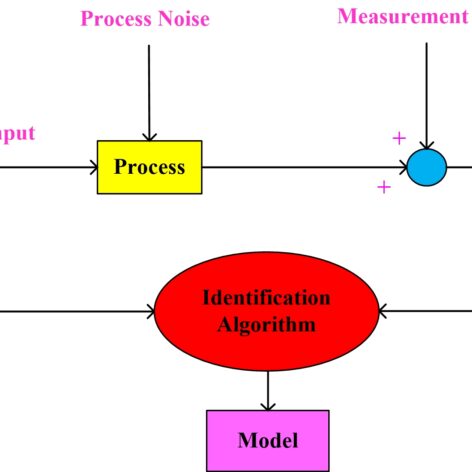
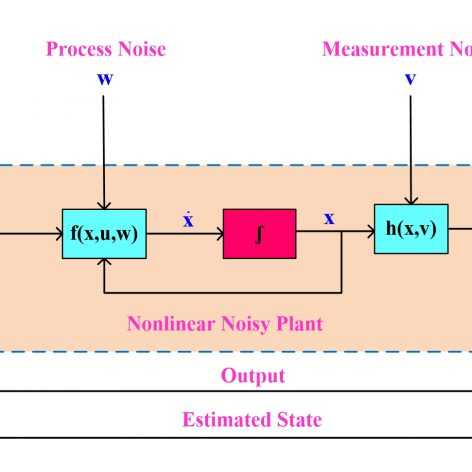
معرفی انواع رویتگرها و تحلیل فرکانسی
در این جلسه مقدمات و پیشینه تاریخی رویتگرها (یا تخمین گرها) در طول سالهای اخیر بر اساس یک مقاله مرور شده و معایب و مزایای هر کدام بحث میشود. فیلتر کالمن (KF) و انواع توسعه یافته های آن (EKF و UKF)، رویتگرهای لیونبرگر و رویتگرهای مقاوم به صورت خلاصه تشریح شده و از بین آنها رویتگر لیونبرگر به عنوان تخمینگر انتخاب میشود. همچنین رفتار پاسخ فرکانسی مورد انتظار از یک رویتگر جهت تضعیف اغتشاش و همچنین افزایش پهنای باند سیستم حلقه بسته مورد بررسی قرار میگیرد.
مدت زمان آموزش: 75 دقیقه
محتویات درس: فیلم با کیفیت 720p- پاورپوینت درس و مقالات مورد اشاره در فیلم
حجم فایل: 134 مگابایت
پیش نمایش جلسه اول:
جلسه دوم:
استخراج LMI های مورد نیاز برای تضمین همگرایی رویتگر
در این جلسه ابتدا با تعیین ساختار ورودی (فیدبک تخمین حالت) و ساختار رویتگر (لیونبرگر) سیستم حلقه بسته را بدست آورده و سپس با تعریف یک تابع لیاپونوف مناسب سعی میشود که پایداری مجانبی حلقه بسته تضمین شود. شروط مورد نیاز برای پایداری مجانبی حلقه بسته و همچنین صفر شدن خطای تخمین به صورت نامساویهای ماتریسی خطی محاسبه میشود که در صورت حلپذیری بهره های کنترل کننده و رویتگر را بدست میدهد.
مدت زمان آموزش: 69 دقیقه
محتویات درس: فیلم با کیفیت 720p- پاورپوینت درس و مقاله مورد اشاره در فیلم
حجم فایل: 93 مگابایت
پیش نمایش جلسه دوم:
جلسه سوم:
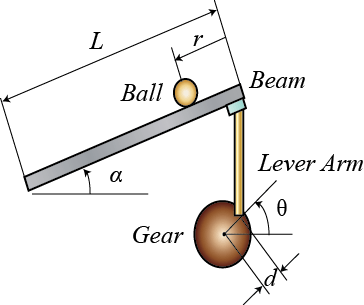
طراحی کنترل کننده فیدبک خروجی از طریق رویتگر مرتبه کامل برای سیستم گوی و میله و شبیهسازی در متلب
در این جلسه برای سیستم گوی و میله (Ball and Beam) یک کنترل کننده فیدبک خروجی از طریق رویتگر مرتبه کامل طراحی میشود. بهره های کنترل کننده و رویتگر لیونبرگر با حل نامساویهای ماتریسی خطی بدست آمده در جلسه قبل محاسبه شده و سیستم حلقه بسته هم در محیط m-file و هم سیمولینک شبیه سازی میشود. بعلاوه رفتار پاسخ فرکانسی رویتگر و خواص حذف نویز آن بررسی شده و در شبیه سازی نشان داده میشود. در انتها مساله ردیابی ورودی مرجع برای سیستم گوی و میله با استفاده از کنترل کننده بررسی شده و شبیه سازی میشود. لازم به ذکر است که تمامی LMI ها با استفاده از تولباکس YALMIP در محیط متلب حل شده اند و بنابراین شما باید این تولباکس را قبل از اجرای کدها بر روی متلب نصب کرده باشید. برای توضیحات تکمیلی درباره نحوه دانلود و نصب تولباکس YALMIP به جلسه ششم از سری فیلمهای آموزش حل ناتساویهای ماتریسی خطی مراجعه فرمایید.
مدت زمان آموزش: 74 دقیقه
محتویات درس: فیلم با کیفیت 720p- پاورپوینت درس – کد متلب و فایل سیمولینک شبیهسازی
حجم فایل: 134 مگابایت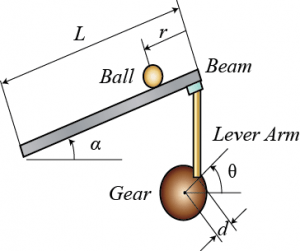
پیش نمایش جلسه سوم:
جلسه چهارم:
طراحی رویتگر مرتبه کاهش یافته و استخراج LMI های مورد نیاز
در این جلسه ابتدا فرم استاندارد فضای حالت برای طراحی رویتگر مرتبه کاهش یافته معرفی شده و نحوه تبدیل هر فضای حالت دلخواه به این فرم استاندارد تشریح میشود. سپس ساختار کنترل کننده و رویتگر مرتبه کاهش یافته مشخص شده و نامساویهای ماتریسی خطی مورد نیاز جهت تضمین پایدارسازی سیستم حلقه بسته و همگرایی تخمین حالتها محاسبه میشود.
مدت زمان آموزش: 66 دقیقه
محتویات درس: فیلم با کیفیت 720p- پاورپوینت درس و مقاله مورد اشاره در فیلم
حجم فایل: 95 مگابایت
پیش نمایش جلسه چهارم:
جلسه پنجم:
طراحی کنترل کننده فیدبک خروجی از طریق رویتگر مرتبه کاهش یافته برای سیستم گوی و میله و شبیهسازی در متلب
در این جلسه با استفاده از نامساویهای ماتریسی خطی بدست آمده در جلسه پیش یک کنترل کننده فیدبک خروجی از طریق رویتگر مرتبه کاهش یافته برای سیستم گوی و میله طراحی میشود. ابتدا سیستم گوی و میله به فرم استاندارد تبدیل شده و سپس LMI های لازم حل شده و بهره های کنترل کننده و رویتگر مرتبه کاهش یافته محاسبه میشود. در ادامه سیستم حلقه بسته با استفاده از هر دو رویتگر مرتبه کامل و مرتبه کاهش یافته هم در محیط m-file و هم در سیمولینک شبیهسازی میشود. در انتها ویژگی های این دو روش برای حالتهای ردیابی سیگنال مرجع و تضعیف نویز باهم مقایسه شده و مزایا و معایب هر کدام در هر مورد مورد بررسی قرار میگیرد.
مدت زمان آموزش: 67 دقیقه
محتویات درس: فیلم با کیفیت 720p- پاورپوینت درس و کد متلب و فایل سیمولینک شبیهسازی
حجم فایل: 132 مگابایت
پیش نمایش جلسه پنجم:
مطالعه بیشتر
 مرجع مهندسی كنترل | دانش با کیفیت در مرز علم
مرجع مهندسی كنترل | دانش با کیفیت در مرز علم







هادی
سلام آقای دکتر. وقت شما بخیر.
چرا در مراجع بیان می شود که اصل تفکیک (Separation principle) برای سیستم های دارای نامعینی یا سیستم های دارای ترم غیرخطی صادق نیست؟
ممنون می شوم راهنمایی بفرمایید.
دکتر علی جوادی
سلام
به خاطر اینکه اثبات ارائه شده فقط برای سیستم خطی و بدون نامعینی صادق است
امیر
با عرض سلام و ادب
بنده بر روی سیستم توربین بادی مبتنی بر ژنراتور دو سو تغذیه هستم
و قصد بررسی رویتگر اغتشاش بر روی این سیستم را دارم ایا جنابعالی اموزشی در این راستا ارایه داده اید؟
با تشکر
علی جوادی
با سلام
در اینجا و مجموعه های دیگه صرفا رویتگر حالت بحث شده و مجموعه ای در مورد رویتگر اغتشاش تهیه نکردم
امیر
ممنون و سپاس گزارم از لطف شما
جسارتا اگر منبعی در این راستا به بنده معرفی کنید ممنون خواهم شد
علی جوادی
من در این زمینه تخصصی ندارم و متاسفانه منبعی نمیشناسم
امیر
ممنونم
مهدی
سلام آقای جوادی ، امیدوارم حالتون خوب باشه ، من دنبال یک مقاله ریو جدید در مورد observers و filters باشه، مقاله ای مثل مقاله A Survey of State and Disturbance Observers for Practitioners نوشته Aaron Radke and Zhiqiang Gao اما با منابع جدیدتر و 2018 یا 2019 باشه. ممنون میشم اگر همچین مقاله ای دارین بهم بگین.
با تشکر
علی جوادی
سلام
من جدیدا در این زمینه سرچ نکردم.
پیشنهاد من اینه که ببینید کدوم مقالات به این مقاله ارجاع دادند. اگر همچین مقاله جامعی که شما دنبالش هستید، وجود داشته باشه اصولا باید به این مقاله ارجاع بده
saeed
سلام
ببخشید در مورد جمله ای که توی این صفحه نوشتید سوال دارم
جمله ای که نوشته شده اینه: البته رویتگرهایی هم وجود دارند که فقط ورودی ویا فقط خروجی سیستم رو دریافت میکنند و حالتها رو تخمین میزنند ولی عموما عملکرد خوبی ندارند و به ندرت از اونها استفاده میشه.
می شه بفرمایید چه رویتگرهایی هستند که فقط با خروجی سیستم حالت رو می تونند تخمین بزنند؟
مثلا از فیلتر کالمن هم می شه استفاده کرد یعنی با این که معادله حالت مشاهده و ورودی رو نداریم و فقط یک تعداد measurment داریم می تونیم تخمین حالت رو انجام بدیم؟
علی جوادی
سلام
مثلا میشه با استفاده از dual estimation حالتها و پارامترها رو به صورت همزمان تخمین زد.
برای اطلاعات بیشتر به جلسه 88 مجموعه تخمین بهینه حالت مراجعه کنید
پیام
Input to SVD must not contain NaN or Inf.
این خطا رو هنگام اجرای ماتریس T میده و نمیدونم دلیلش چیه
علی جوادی
شاید مشکل به solver بر میگرده. mosek رو امتحان کنید ببینید جواب میده یا نه