 مرجع مهندسی كنترل | دانش با کیفیت در مرز علم
مرجع مهندسی كنترل | دانش با کیفیت در مرز علم

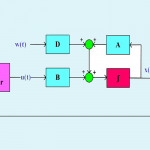
فیلمهای مربوط به کنترل مقاوم فیدبک حالت سیستمهای خطی تحت اغتشاش و همچنین کنترل فیدبک خروجی سیستمهای خطی با استفاده از رویتگر قبلا خدمت دوستان تقدیم شده است. اگر سیستمی هم تحت تاثیر اغتشاش خارجی بوده و هم امکان اندازهگیری تمامی حالتها وجود نداشته باشد، دیگر نمیتوان از این فیلمها برای چنین سیستمی استفاده کرد. در سری فیلمهای حاضر دقیقا این مشکل مدنظر قرار گرفته و هدف طراحی یک کنترلکننده مقاوم برای سیستمهای خطی تحت تاثیر اغتشاش فقط با استفاده از یک یا چند خروجی سیستم است. کنترل کننده مورد نظر دارای رویتگر نبوده ولی دارای دینامیک داخلی است. همچنین تنها از خروجی سیستم فیدبک گرفته شده و نیازی به ورودی سیستم تحت کنترل ندارد. معیار تضعیف اغتشاش همان نرم ∞H است که به تفصیل در سری فیلمهای کنترل مقاوم سیستمهای خطی تحت اغتشاش با استفاده از نامساویهای خطی ماتریسی تشریح شده و ارتباط آن با تلف کنندگی (Dissipativity) و پایداری بهره L2 بحث شده است. برای اطلاعات بیشتر در مورد تضعیف اغتشاش از طریق نرم ∞H و مزایای فرمولبندی این مساله به شکل LMI به فیلمهای مربوط به کنترل مقاوم سیستمهای خطی تحت اغتشاش با استفاده از نامساویهای خطی ماتریسی مراجعه کنید.
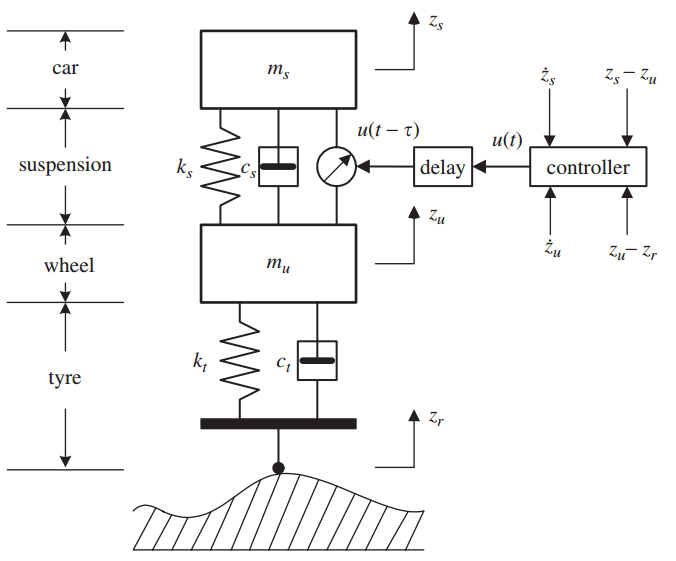
بعد از محاسبه نامساویهای ماتریسی خطی لازم برای حل مساله که ایده اصلی آن از یک مقاله IEEE گرفته شده است، روش پیشنهادی بر روی یک مدل یک چهارم سیستم تعلیق خودرو پیاده شده و سیستم حلقه بسته هم در محیط m-file و هم در سیمولینک شبیهسازی شده است. همچنین توابع تبدیل از نویز اندازه گیری، اغتشاش خارجی و ورودی مرجع به خروجی محاسبه شده و پهنای باند سیستم حلقه بسته و خواص تضعیف نویز و اغتشاش به صورت تحلیلی و شبیهسازی مورد بررسی قرار گرفته است. لازم به ذکر است که سیستم تعلیق در این سری فیلمها فقط به عنوان یک مثال کاربردی مورد استفاده قرار گرفته است و توضیح اضافی در مورد آن ارائه نشده است. برای درک بهتر این مثال شاید بهتر باشد قبل از دیدن این سری فیلمها، جلسات مربوط به مدلسازی و شبیهسازی ارتعاشات جاده برای سیستم کنترل تعلیق فعال خودرو را ملاحظه کنید و بعد از اینکه با سیستم تعلیق آشنا شدید، این سری فیلمها را ببینید.
با امید به اینکه مورد رضایت شما عزیزان قرار بگیرد
پیشنیازها: آشنایی اولیه با جبر خطی و تئوری پایداری لیاپونوف – آشنایی با کدنویسی در محیط متلب – آشنایی با نامساویهای ماتریسی خطی (LMI)
قبل از دیدن ادامه پست، راهنمای استفاده از سری فیلمهای کنترل مقاوم را حتما ببینید:
جلسه اول:
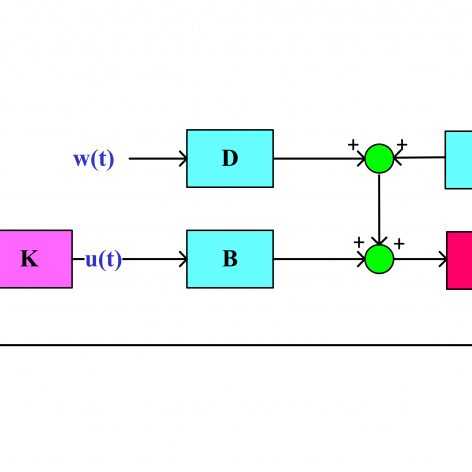
فرمولبندی طراحی کنترل مقاوم فیدبک خروجی برای سیستمهای دارای اغتشاش خارجی
استخراج LMI های مورد نیاز با استفاده از مکمل شور و تبدیل متجانس
پیادهسازی کنترلکننده مقاوم بر روی سیستم تعلیق فعال خودرو و شبیهسازی در متلب
شبیهسازی در محیط سیمولینک و تحلیل در حوزه فرکانس
جلسه دوم:
جلسه سوم:
جلسه چهارم:
- لینک دانلود فایل بلافاصله بعد از پرداخت وجه به نمایش در خواهد آمد.
- همچنین لینک دانلود به ایمیل شما ارسال خواهد شد به همین دلیل ایمیل خود را به دقت وارد نمایید.
- ممکن است ایمیل ارسالی به پوشه اسپم یا Bulk ایمیل شما ارسال شده باشد.
- در صورتی که به هر دلیلی موفق به دانلود فایل مورد نظر نشدید با ما تماس بگیرید.







احسان شايان
من يه پايان نامه دارم در خصوص كنترل كننده مقاوم htc يا همون High Temperature Control كه با كنترل كننده pid تركيب ميشه اين كنترل كننده از نوع h بينهايته الان دنبال يه رفرنس و مقاله ميگردم كه بتونم نشون بدم htc يه نوعي از h بينهايته
علی جوادی
@احسان شايان,
سلام
در مورد HTC اطلاعی ندارم اما اگه میدونید که نوعی از H بینهایته خوب اثباتش کنید و اگر نمیدونید باید داخل مراجع پیدا کنید. باید مراجع مرتبط رو بیشتر بگردید.
مجتبی
با عرض سلام و احترام،
من برای پایداری سیستم قدرت (small stability)نیاز به طراحی یه کنترلر H infinity دارم ایا امکانش هست دراین زمینه بهم کمک کنید.
پیشاپش سپاسگذارم
علی جوادی
اقدام شد
salma
با سلام
ممنونم از آموزشهای مفیدتون در زمینه کنترلر hinfinity. من میخواستم کنترلر l2gain برای مینیمم کردن اثر اغتشاش رو به سیستم غیرخطی هم اعمال کنم. آیا آموزشی در این خصوص در سایت موجود هست؟یا امکانش هست مرجعی معرفی کنید؟
ممنونم از کمکتون
علی جوادی
@salma,
با سلام و تشکر از لطف شما
تا حالا در این مورد آموزشی آماده نکردم ولی روشهای معروف به H-infinity غیرخطی وجود داره که تعمیم یافته حالت خطی به سیستمهای غیرخطیه.
به عنوان مثال میتونم کتاب زیر رو بهتون معرفی کنم:
https://goo.gl/YA1qLa
این کتاب هم خوبه:
https://goo.gl/h6YHpE
نیما
نهایت سپاس از خدماتتون.
مدیر سایتادمین سایت
@نیما,
خواهش می کنم
نیما
سلام وقتتون بخیر علیرغم اینکه من هزینه رو پرداخت کردم متاسفانه هنوز فایلها برای من ارسال نشده.لطفا ترتیب اثر بدین
سپاسگزارم
علی جوادی
@نیما,
سلام
چشم. پیگیری میکنم
نیما
@علی جوادی, بینهایت سپاسگزارم از منابعتون.خدمات عالی،سیستم آموزشی عالی.واقعا سپاسگزارم.به همه همکاران پیشنهاد خواهم کرد.بازم سپاس
محمد
سلام
با تشکر از مطالب خوبی که ارائه دادید.
فقط میشه لطفا مثله آموزش کنترل سیستمهای تاخیردار که منابع را گفته بودید، منابع این آموزش را هم بفرمایید؟
ممنون
علی جوادی
@محمد,
با سلام و تشکر از لطف شما
هیچ مرجعی نیست که تمام سری فیلمهای کنترل مقاوم داخلش باشه بلکه هر بخشی از این سری فیلمها از مقاله یا کتابی گرفته شده که در محل خودش معرفی شده.
در واقع این سری فیلمها توسط خودم تقسیم بندی شده و تمام اثباتها رو خودم انجام دادم البته تمام ابزارهای ریاضی مورد نیاز در مراجع وجود داشته و من فقط از اونها استفاده کردم
از این دید سری فیلمهای کنترل مقاوم کاملا متفاوت از فیلمهای مربوط به تاخیره چون در مورد تاخیر از یک مرجع مشخص آموزشها دنبال شده
پری
سلام برای من کد فعال سازی در هر دو حالت نمیاد لطفا راهنمایی کنید
مدیر سایتادمین سایت
@پری,
سلام
متوجه سوالتون نشدم دوست عزیز
پری
کد فعال سازی برای مشاهده فیلم ها ندارم دوتا فیلد هست کد برنامه اون پر هست ولی فیلد دوم کدی نیست که وارد کنم و اگر اون فیلد خالی باشه کد فعالسازی رو نمیده
مدیر سایتادمین سایت
@پری,
سلام
کی و با چه ایمیلی و چه محصولی خریداری فرمودین؟
لطفا در تلگرام بهم پیام بدید
09162963870
با تشکر
Milad
با سلام و خسته نباشید خدمت شما
آیا آموزشی برای شبیه سازی سیستم های غیرخطی با LMI که عدم قطعیت از نوع غیرساختاری (دینامیک مدل نشده) داشته باشند ارائه می کنید؟
علی جوادی
@Milad,
سلام
امیدوارم در آینده به این موضوع هم بپردازم ولی نمیدونم کی فرصت میشه. البته فاز مطالعاتیش هم انجام نشده و باید کمی مطالعه داشته باشم.
رامين
با سلام خدمت شما آقاي دكتر
من تمام فيلم هاي شما براي lmi رو خريدم و كامل مطالعه كردم.در مسئله رديابي شما مقادير نامي را قرار مي دهيد ولي مسئله پايان نامه من ilc هستش.كنترل يادگير تكرار شونده.در واقع RILC هستش.يعني در ماتريس هاي سيستم A B C عدم قعيت داريم.و در معادلات سيستم اغتشاش و نويز وجود دارد كه در هر تكرار مي دانيم كه نرم محدودي دارد.ميخواهيم نرم خطا كه همان اختلاف خروجي مطلوب و خروجي سيستم است محدود باشد و بعد از چند تكرار خروجي،خروجي مرجع را به خطاي قابل قبولي رديابي كند.ولي من عدم قطعيت ها رو همونطور كه گفتيد بصورت structure bounded گرفتم،ولي موفق به نوشتن ديناميك خطا نشدم كه بعد داخل تابع لياپانوف خطا رو هم بيارم و ….ميخواستم اگر امكانش هست راهنماييم كنيد
علی جوادی
@رامين,
سلام
روشی که من داخل فیلمها برای ردیابی مطرح کردم، فقط برای آشنایی با بحث ردیابی بوده و تحت شرایط خاصی (مثل تغییرات کند سیگنال مرجع و بدون نامعینی) قابل استفاده هستش. برای حالتی که نامعینی و اغتشاش هم باشه، نمیشه از این روش استفاده کرد.
برای حالتی که نامعینی باشه یا اغتشاش در نظر گرفته بشه، نمیشه به ردیابی با خطای صفر رسید ولی شاید بشه به خطای محدود رسید. برای این مورد میتونید مثلا به مقاله زیر (و مقالات مشابه) مراجعه کنید:
http://ieeexplore.ieee.org/document/5961942/
رامين
@رامين,
دكتر يعني ميشه به lmi تبديل كرد؟من كنترل يادگير ميخوام اسفاده كنم
علی جوادی
@رامين,
من در مورد کنترل یادگیر اطلاعی ندارم متاسفانه
n
سلام ببخشید بنده آموزی ترکیبی h2/hinf رو میخواستم.
علی جوادی
@n,
سلام
با عرض معذرت فعلا موجود نیست.
در آینده سعی میکنم این موضوع رو هم پوشش بدم