در این جلسه سیستم کوادروتور از لحاظ سخت افزاری و عملکردی به طور کامل توضیح داده می شود. این جلسه تحت عنوان پیش درامدی بر کوادروتور ارایه می شود.
مدت زمان: 70 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس
کیفیت: 720P
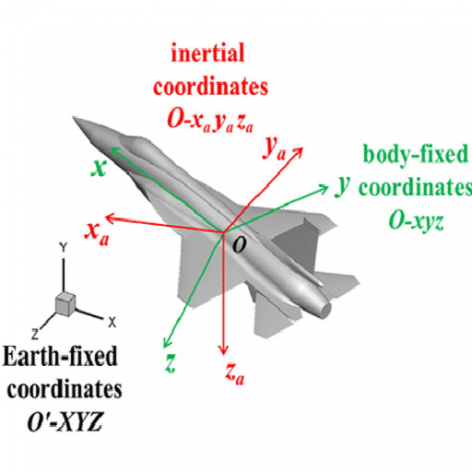
در این جلسه مفهوم پایه ای عملکرد سیستم کوادروتور، معرفی محورهای فرضی حاکم بر سیستم، نحوه انتقال از فریم بدنه به فریم اینرسایی و بالعکس و همچنین نحوه استخراج معادلات دینامیکی موتورهای براشلس DC مورد استفاده در سیستم کوادروتور به طور کامل توضیح داده می شود. . این جلسه تحت عنوان مدلسازی سیستم کوادروتور بخش (1) ارایه می شود.
مدت زمان: 52 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس
کیفیت: 720P
در این جلسه مدل ریاضی کوادروتور شامل متغیرهای حالت سیستم به طور کامل بررسی می شود. در ادامه معادلات دینامیکی حاکم بر سیستم کوادروتور از طریق دو روش نیوتن-اویلر و همچنین اویلر-لاگرانژ به صورت جداگانه و به تفصیل توضیح داده می شود. این جلسه تحت عنوان مدلسازی سیستم کوادروتور بخش (2) ارایه می شود.
مدت زمان: 53 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس
کیفیت: 720P
در این جلسه مدل ریاضی سیستم کوادروتور از منظری دیگر مورد بررسی قرار می گیرد و مدلسازی سیستم کوادروتور بر مبنای تعاریف علم سینماتیک و علم دینامیک انجام و معادلات ریاضی سیستم استخراج می گردد . در ادامه نیروها و گشتاورهای وارد بر سیستم کوادروتور به طور کامل توضیح داده می شوند و در نهایت نحوه به دست اوردن معادلات فضای حالت سیستم شرح داده می شود. این جلسه تحت عنوان مدلسازی سیستم کوادروتور بخش (3) ارایه می شود.
مدت زمان: 52 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس
کیفیت: 720P
در این جلسه به علم ایرودینامیک پرواز پرداخته می شود. نیروهای ایرودینامیکی به طور کامل توضیح داده می شوند و سپس ایرودینامیک عمودپروازها به طور اختصاصی برای سیستم کوادروتور مطرح و روابط ان استخراج می گردد. در ادامه نحوه محاسبه سرعت و مسیر باد که مهمترین عامل اغتشاش خارجی بر هم زننده تعادل این سیستم پرنده می باشد، مطرح می گردد. این جلسه تحت عنوان ایرودینامیک پرواز (1) ارایه می شود.
مدت زمان: 70 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس
کیفیت: 720P
این جلسه در ادامه جلسه پنجم ، به تکمیل روابط ریاضی ایرودینامیک پرواز سیستم کوادروتور می پردازد. در ادامه روش های محاسبه نیروی دراگ جهت تخمین بردار و مسیر باد به طور کامل شرح داده می شوند و در نهایت معادلات فضای حالت سیستم کوادروتور به همراه اثرات ایرودینامیکی استخراج می گردند. این جلسه تحت عنوان ایرودینامیک پرواز (2) ارایه می شود.
مدت زمان: 50 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس
کیفیت: 720P
در این جلسه به ساختار کنترلی سیستم کوادروتور پرداخته می شود و تمامی لایه های کنترلی به همراه بلوک دیاگرام انها و ارتباط بین هریک از این لایه های کنترلی به طور کامل مطرح می گردد . دانش کسب شده در این جلسه پیش زمینه طراحی هر نوع کنترلر دلخواه برای این سیستم پرنده می باشد.
مدت زمان: 66 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس
کیفیت: 720P
در این جلسه فیلتر کالمن پیوسته توسعه یافته به عنوان یک مشاهده گر و تخمین زننده مطرح در سیستم های غیر خطی معرفی می گردد و در نهایت نحوه تخمین متغیرهای حالت سیستم کوادروتور بر مبنای این نوع فیلتر خاص به طور کامل توضیح داده می شود..
مدت زمان: 70 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس
کیفیت: 720P
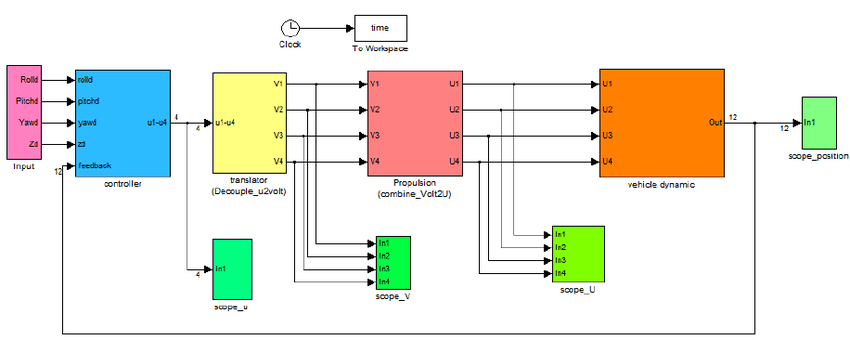
در این جلسه نحوه پیاده سازی روش کنترلی مد لغزشی بر روی سیستم کوادروتور به صورت تیوری و به صورت شبیه سازی شده در نرم افزار متلب اموزش داده می شود.
مدت زمان: 72 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس ، m-file های نرم افزار متلب
کیفیت: 720P
در این جلسه نحوه پیاده سازی الگوریتم بهینه سازی ژنتیک به عنوان یک روش تحلیلی ، جهت محاسبه دقیق تری از پارامترهای کنترل کننده مد لغزشی اموزش داده می شود.
مدت زمان: 74 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس ، m-file های نرم افزار متلب
کیفیت: 720p
در این جلسه نحوه پیاده سازی فیلتر کالمن پیوسته توسعه یافته ، جهت تخمین متغیرهای حالت سیستم کوادروتور در نرم افزار متلب اموزش داده می شود.
مدت زمان: 47 دقیقه
فایل های همراه: فایل تصویری ، m-file های نرم افزار متلب
کیفیت: 720p
در این جلسه نحوه پیاده سازی کنترل کننده پسگام (Backstepping) ، بر روی سیستم کوادروتور به صورت تیوری و به صورت شبیه سازی شده در نرم افزار متلب اموزش داده می شود.
مدت زمان: 57 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس ، m-file های نرم افزار متلب
کیفیت: 720p
در این جلسه اموزشی ، نحوه پیاده سازی یک کنترل کننده مقاوم و بهینه ترکیبی(ROSMC) بر مبنای معادلات ریکاتی وابسته به حالت ( SDRE) تحت عنوان (Robust Optimal Sliding Mode Control based on SDRE) ، بر روی سیستم کوادروتور به صورت تیوری و به صورت شبیه سازی شده در نرم افزار متلب در چهار بخش جداگانه به صورت زیر اموزش داده می شود.
مدت زمان جلسه :4 ساعت و30 دقیقه
فایل های همراه جلسه: فایل تصویری ، فایل پاورپوینت درس ، ، m-file های نرم افزار متلب
بخش اول :
طراحی قانون کنترل بهینه مقاوم با استفاده از کنترل کننده مد لغزشی بر اساس معادلات
ریکاتی وابسته به حالت
مدت زمان بخش اول : 2 ساعت و 5 دقیقه
فایل های همراه بخش اول: فایل تصویری ، فایل پاورپوینت درس ، فایل PDF پاورپوینت درس
پیش نمایش جلسه اول
بخش دوم:
برنامه نویسی روش کنترلی Robust Optimal Sliding Mode based on SDRE
در حالت Point to Point
مدت زمان بخش دوم : 1 ساعت و 5 دقیقه
فایل های همراه بخش دوم: فایل تصویری ، فایل پاورپوینت درس ، m-file های نرم افزار متلب
پیش نمایش بخش دوم
بخش سوم :
برنامه نویسی روش کنترلی Robust Optimal Sliding Mode based on SDRE
در حالت Trajectory Tracking
مدت زمان بخش سوم : 35 دقیقه
فایل های همراه بخش سوم: فایل تصویری ، فایل پاورپوینت درس ، m-file های نرم افزار متلب
پیش نمایش بخش سوم
بخش چهارم :
برنامه نویسی روش کنترلی Robust Optimal Sliding Mode based on SDRE
جهت محاسبه خطای Minimum Mean Square Error
مدت زمان بخش چهارم 45 دقیقه
فایل های همراه بخش چهارم : فایل تصویری ، فایل پاورپوینت درس ، m-file های نرم افزار متلب
پیش نمایش بخش چهارم
در این جلسه اموزشی ، نحوه پیاده سازی کنترل کننده گام به عقب(Backstepping) به صورت ترکیب با فیلتر کالمن توسعه یافته پیوسته (Extended Kalman Bucy Filter) در حالت ردیابی یک مسیر از پیش تعیین شده (Trajectory Tracking) ، بر روی سیستم کوادروتور به صورت شبیه سازی شده در نرم افزار متلب اموزش داده می شود.
مدت زمان جلسه :45 دقیقه
فایل های همراه جلسه: فایل تصویری ، m-file های نرم افزار متلب
 مرجع مهندسی كنترل | دانش با کیفیت در مرز علم
مرجع مهندسی كنترل | دانش با کیفیت در مرز علم



مهندس بابایی
@علی,
با سلام و با تشکر از لطف جنابعالی.
واقعیت این هستش که فایل های پاورپوینت بسیار مرتب و دقیق نوشته شدند و در اختیار تیم پشتیبانی قرار داده شدند. احتمالا به هنگام اپلود کردن فایل ها توسط تیم پشتیبانی این مشکل به وجود امده است.به هرحال این موضوع با تیم پشتیبانی درمیان گذاشته خواهد شد و ممنون از اینکه اطلاع دادید.
موفق بلشید.
نعیم
سلام
در جلسه هفتم در قسمت اصطلاحات کاربردی من فکر می کنم که اشتباهی ترجمه کردید. لطفا فایل پاورپوینت رو چک کنید واگر اشتباه است تصحیح بفرمایید خانم مهندس و اطلاع دهید. با سپاس فراوان
مهندس بابایی
@نعیم,
با سلام
تمام اصطلاحات نوشته شده به درستی ترجمه شده اند. لطفا دقت بفرمایید که یک اصطلاح در کاربردهای گوناگون ، مفاهیم متفاوتی خواهد داشت. همچنین ترجمه در نظر گرفته شده برای هر اصطلاح با توجه به کاربرد ان در این سیستم می باشد و لزوما ترجمه کلمه به کلمه برای اصطلاحات انجام نمی شود.
تنها در قسمت اخر یک اشتباه تایپی وجود دارد : کلمه motion planing صحیح می باشد نه motion planar.
موفق باشید.
نعیم
@مهندس بابایی,
ممنون از راهنمایی شما استاد گرانقدر
مهندس بابایی
@نعیم,
خواهش می کنم.
موفق باشید.
میلاد
با عرض سلام و خسته نباشید به شما به خاطر این آموزش بسیار کاربردی
بنده کلیه جلسات آموزشی را خریداری نموده ام…با شناسه خرید: 8618391300
ولی متاسفانه کلیه فایل های متلب جلسات شبیه سازی و پیاده سازی باز نمی شوند و در محیط متلب اوپن نمی شوند و ارور CD می دهند..
لطفا راهنمایی کنید که مشکل از کجاست؟ و نیز چگونه می توتن مشکل رو برطرف کرد؟
با تشکر
asaad
سلام
من جلسات رو خریدم ولی کار نکرد برام
اخه فایلا پیوندش .zxp بوده و این پیوند مال فایلاهای نصبی نرم افزار adobe هستش و قابلا اجرا نیس
لطفا یه راه حل سریع برام پیدا کنید
مهندس بابایی
@asaad,
سلام
لطفا با مدیریت سایت تماس بگیرید تا مشکل شما سریعتر بررسی شود.
حمید احمدی ( مالک تایید شده )
سلام
متاسفانه جلسه هشتم فاقد شبیه سازی میباشد و فقط به بررسی تئوریک مساله پرداخته شده است و الا در این مورد خاص چون عنوان آموزش مدلسازی و شبیه سازی کوادروتور هست بایستی تخمین حالت ها با فیلتر کالمن صورت میگرفت
مهندس بابایی
@حمید احمدی,
با سلام
ابتدا اینکه از توجه شما به این مجموعه اموزشی ممنونم.
لازم است چند نکته در رابطه با این موضوع مطرح گردد: همانطور که در فیلم اموزشی این جلسه نیز عنوان شد، بحث فیلترینگ بسیار گسترده است و گنجاندن تمام نکات و مطالب مربوط به این موضوع در داخل یک جلسه امکان پذیر نیست اما با این وجود تمام اطلاعات لازم در رابطه با این نوع فیلتر خاص در یک جلسه برای شما جمع بندی گردید. دقت بفرمایید که مدت زمان جلسه هشتم ۷۰ دقیقه است و بیش از یک جلسه استاندارد (۶۰ دقیقه)که دیگر فرصتی برای اموزش بحث شبیه سازی در رابطه این موضوع نیست، چراکه نوشتن M-file ان نیز نکاتی دارد که باید اموزش داده شود، از این جهت تنها صرف قرار دادن فایل متلب برای دانشجویان، کفایت نمی کند.
بنابراین طبق قولی که داده بودم هرجا نیاز به شبیه سازی در متلب باشد قطعا به شما اموزش داده خواهد، این جلسه اموزشی نیز در حال اماده سازی می باشد و در پایان این ماه در اختیار شما قرار خواهد گرفت.
موفق باشید.
حسین
سلام.ببخشید من کل جلسات رو خریدم ولی میگه پسورد جلسه ده اشتباهه
مهندس بابایی
@حسین,
با سلام
لطفا با مدیریت سایت تماس بگیرید تا بررسی شود.
جواد
با سلام
من کل جلسات را خریداری کردم ولی پسوورد جلسه 10 صحیح نسیت و فیلم جلسه دهم را نمایش نمیدهد فعال سازی آفلاین هم پاسخ میدهد که فرمت ارسالی غلط است
لطف بفرمایید پسورد صحیح جلسه دهم را مجددا برای بنده ارسال فرمایید
با تشکر
مهندس بابایی
@جواد,
با سلام
لطفا با مدیریت سایت تماس بگیرید.
حسین
سلام.خسته نباشین.ممنون از اموزش خوبتون
.ببخشید مهندس بابایی میشه چندتا از مقاله هاتون رو برای من ایمیل کنین یا حداقل عنوانشو بگین
مهندس بابایی
@حسین,
با سلام
از توجه شما به این مجموعه اموزشی ممنونم. لینک های مربوط به مشاهده مقالات در اولین فرصت دسته بندی خواهد شد و در اختیار شما قرار خواهد گرفت.
موفق باشید.
جواد
با سلام
من کل مجموعه را خریداری کردم ولی فایل ویدیویی بعضی پارت ها پسوند عجیب غریب ZXP دارد و با هیج پلیری نمایش داده نمی شود..چی کار باید بکنم مشکل مرتفع بشه؟
شماره تراکنش بانکی: 41570760344
مدیر سایتادمین سایت ( مالک تایید شده )
@جواد,
سلام . وقت بخیر . باید پلیر مخصوص ما را از داخل سایت دانلود کنید .
مدیر سایتادمین سایت ( مالک تایید شده )
@جواد,
سلام . وقت بخیر.
باید پلیر مخصوص ما را از داخل سایت دانلود کنید
حسین
ببخشید فایل فیلم جلسه دوم zxp هست چطوری باز میشه؟
مدیر سایتادمین سایت ( مالک تایید شده )
@حسین,
سلام . وقت بخیر . باید پلیر مخصوص ما را از داخل سایت دانلود کنید
مدیر سایتادمین سایت ( مالک تایید شده )
@حسین,
سلام . وقت بخیر
باید پلیر مخصوص ما را از سایت دانلود کنید ، سپس کدهایی که داخل ایمی براتون اومده را وارد میکنید و بعد فعالسازی انلاین را بطنید