در این جلسه سیستم کوادروتور از لحاظ سخت افزاری و عملکردی به طور کامل توضیح داده می شود. این جلسه تحت عنوان پیش درامدی بر کوادروتور ارایه می شود.
مدت زمان: 70 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس
کیفیت: 720P
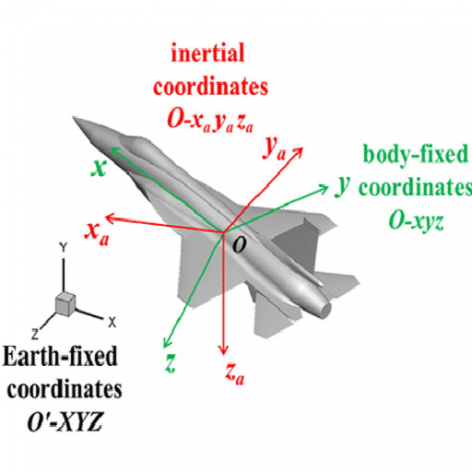
در این جلسه مفهوم پایه ای عملکرد سیستم کوادروتور، معرفی محورهای فرضی حاکم بر سیستم، نحوه انتقال از فریم بدنه به فریم اینرسایی و بالعکس و همچنین نحوه استخراج معادلات دینامیکی موتورهای براشلس DC مورد استفاده در سیستم کوادروتور به طور کامل توضیح داده می شود. . این جلسه تحت عنوان مدلسازی سیستم کوادروتور بخش (1) ارایه می شود.
مدت زمان: 52 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس
کیفیت: 720P
در این جلسه مدل ریاضی کوادروتور شامل متغیرهای حالت سیستم به طور کامل بررسی می شود. در ادامه معادلات دینامیکی حاکم بر سیستم کوادروتور از طریق دو روش نیوتن-اویلر و همچنین اویلر-لاگرانژ به صورت جداگانه و به تفصیل توضیح داده می شود. این جلسه تحت عنوان مدلسازی سیستم کوادروتور بخش (2) ارایه می شود.
مدت زمان: 53 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس
کیفیت: 720P
در این جلسه مدل ریاضی سیستم کوادروتور از منظری دیگر مورد بررسی قرار می گیرد و مدلسازی سیستم کوادروتور بر مبنای تعاریف علم سینماتیک و علم دینامیک انجام و معادلات ریاضی سیستم استخراج می گردد . در ادامه نیروها و گشتاورهای وارد بر سیستم کوادروتور به طور کامل توضیح داده می شوند و در نهایت نحوه به دست اوردن معادلات فضای حالت سیستم شرح داده می شود. این جلسه تحت عنوان مدلسازی سیستم کوادروتور بخش (3) ارایه می شود.
مدت زمان: 52 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس
کیفیت: 720P
در این جلسه به علم ایرودینامیک پرواز پرداخته می شود. نیروهای ایرودینامیکی به طور کامل توضیح داده می شوند و سپس ایرودینامیک عمودپروازها به طور اختصاصی برای سیستم کوادروتور مطرح و روابط ان استخراج می گردد. در ادامه نحوه محاسبه سرعت و مسیر باد که مهمترین عامل اغتشاش خارجی بر هم زننده تعادل این سیستم پرنده می باشد، مطرح می گردد. این جلسه تحت عنوان ایرودینامیک پرواز (1) ارایه می شود.
مدت زمان: 70 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس
کیفیت: 720P
این جلسه در ادامه جلسه پنجم ، به تکمیل روابط ریاضی ایرودینامیک پرواز سیستم کوادروتور می پردازد. در ادامه روش های محاسبه نیروی دراگ جهت تخمین بردار و مسیر باد به طور کامل شرح داده می شوند و در نهایت معادلات فضای حالت سیستم کوادروتور به همراه اثرات ایرودینامیکی استخراج می گردند. این جلسه تحت عنوان ایرودینامیک پرواز (2) ارایه می شود.
مدت زمان: 50 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس
کیفیت: 720P
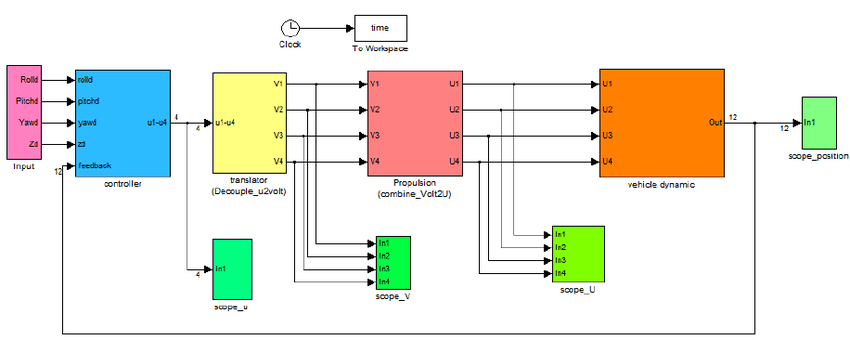
در این جلسه به ساختار کنترلی سیستم کوادروتور پرداخته می شود و تمامی لایه های کنترلی به همراه بلوک دیاگرام انها و ارتباط بین هریک از این لایه های کنترلی به طور کامل مطرح می گردد . دانش کسب شده در این جلسه پیش زمینه طراحی هر نوع کنترلر دلخواه برای این سیستم پرنده می باشد.
مدت زمان: 66 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس
کیفیت: 720P
در این جلسه فیلتر کالمن پیوسته توسعه یافته به عنوان یک مشاهده گر و تخمین زننده مطرح در سیستم های غیر خطی معرفی می گردد و در نهایت نحوه تخمین متغیرهای حالت سیستم کوادروتور بر مبنای این نوع فیلتر خاص به طور کامل توضیح داده می شود..
مدت زمان: 70 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس
کیفیت: 720P
در این جلسه نحوه پیاده سازی روش کنترلی مد لغزشی بر روی سیستم کوادروتور به صورت تیوری و به صورت شبیه سازی شده در نرم افزار متلب اموزش داده می شود.
مدت زمان: 72 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس ، m-file های نرم افزار متلب
کیفیت: 720P
در این جلسه نحوه پیاده سازی الگوریتم بهینه سازی ژنتیک به عنوان یک روش تحلیلی ، جهت محاسبه دقیق تری از پارامترهای کنترل کننده مد لغزشی اموزش داده می شود.
مدت زمان: 74 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس ، m-file های نرم افزار متلب
کیفیت: 720p
در این جلسه نحوه پیاده سازی فیلتر کالمن پیوسته توسعه یافته ، جهت تخمین متغیرهای حالت سیستم کوادروتور در نرم افزار متلب اموزش داده می شود.
مدت زمان: 47 دقیقه
فایل های همراه: فایل تصویری ، m-file های نرم افزار متلب
کیفیت: 720p
در این جلسه نحوه پیاده سازی کنترل کننده پسگام (Backstepping) ، بر روی سیستم کوادروتور به صورت تیوری و به صورت شبیه سازی شده در نرم افزار متلب اموزش داده می شود.
مدت زمان: 57 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس ، m-file های نرم افزار متلب
کیفیت: 720p
در این جلسه اموزشی ، نحوه پیاده سازی یک کنترل کننده مقاوم و بهینه ترکیبی(ROSMC) بر مبنای معادلات ریکاتی وابسته به حالت ( SDRE) تحت عنوان (Robust Optimal Sliding Mode Control based on SDRE) ، بر روی سیستم کوادروتور به صورت تیوری و به صورت شبیه سازی شده در نرم افزار متلب در چهار بخش جداگانه به صورت زیر اموزش داده می شود.
مدت زمان جلسه :4 ساعت و30 دقیقه
فایل های همراه جلسه: فایل تصویری ، فایل پاورپوینت درس ، ، m-file های نرم افزار متلب
بخش اول :
طراحی قانون کنترل بهینه مقاوم با استفاده از کنترل کننده مد لغزشی بر اساس معادلات
ریکاتی وابسته به حالت
مدت زمان بخش اول : 2 ساعت و 5 دقیقه
فایل های همراه بخش اول: فایل تصویری ، فایل پاورپوینت درس ، فایل PDF پاورپوینت درس
پیش نمایش جلسه اول
بخش دوم:
برنامه نویسی روش کنترلی Robust Optimal Sliding Mode based on SDRE
در حالت Point to Point
مدت زمان بخش دوم : 1 ساعت و 5 دقیقه
فایل های همراه بخش دوم: فایل تصویری ، فایل پاورپوینت درس ، m-file های نرم افزار متلب
پیش نمایش بخش دوم
بخش سوم :
برنامه نویسی روش کنترلی Robust Optimal Sliding Mode based on SDRE
در حالت Trajectory Tracking
مدت زمان بخش سوم : 35 دقیقه
فایل های همراه بخش سوم: فایل تصویری ، فایل پاورپوینت درس ، m-file های نرم افزار متلب
پیش نمایش بخش سوم
بخش چهارم :
برنامه نویسی روش کنترلی Robust Optimal Sliding Mode based on SDRE
جهت محاسبه خطای Minimum Mean Square Error
مدت زمان بخش چهارم 45 دقیقه
فایل های همراه بخش چهارم : فایل تصویری ، فایل پاورپوینت درس ، m-file های نرم افزار متلب
پیش نمایش بخش چهارم
در این جلسه اموزشی ، نحوه پیاده سازی کنترل کننده گام به عقب(Backstepping) به صورت ترکیب با فیلتر کالمن توسعه یافته پیوسته (Extended Kalman Bucy Filter) در حالت ردیابی یک مسیر از پیش تعیین شده (Trajectory Tracking) ، بر روی سیستم کوادروتور به صورت شبیه سازی شده در نرم افزار متلب اموزش داده می شود.
مدت زمان جلسه :45 دقیقه
فایل های همراه جلسه: فایل تصویری ، m-file های نرم افزار متلب
 مرجع مهندسی كنترل | دانش با کیفیت در مرز علم
مرجع مهندسی كنترل | دانش با کیفیت در مرز علم




محمد عبداله زاده
با شلام دوباره خدمتتون خانم دکتر و ممنون از اموزش های خوبی که ارائه میدین که واقعا در بیشتر دانشگاه های ما چنین مطالبی ارائه نمی کنن خانمدکتر ببخشید اثبات رابطه ROSMC رو هم میشه لینک دسترسیش در اختیارمون بزارین ممنون میشم از لطفتون
مهندس بابایی
با سلام
خوشحال هستیم که اموزش های ارایه شده مورد توجه شما دوستان قرار گرفته است.
در بخش اول جلسه 13، در اسلایدهای 30 و 31 به طور مختصر ب اثبات پایداری با استفاده از تابع لیاپانوف نشان داده شده است.شما می تونید برای اثبات کامل تر و ارجاع به یکی از مقالات خودم که لینک دسترسی اون رو در زیر قرار دادم نیز اشاره کنید:
https://journals.sagepub.com/doi/full/10.1177/0142331216640600
موفق باشید.
علی
سلام خدمت سرکار خانم بابایی
ببخشید من این آموزش رو تا جلسه 12 تهیه کردم و کامل دیدم و شبیه سازی ها رو انجام دادم. میخواستم ببینم میتونم بحث سوئیچینگ رو در این حیطه بکار ببرم و موضوع جدیدی برای پروژه پایانی ایجاد کنم؟ و اینکه آیا آموزش های سیستم های سوئیچینگ ارایه شده توسط خانم فرجی میتونه در این جهت کمکم کنه؟
مهندس بابایی
با سلام
ببینید مهمترین جلسات این مجموعه اموزشی، 4 جلسه اخر هست (مبحث ویژه) که یک روش hybrid رو به طور کامل به شما اموزش میده و دید خوبی روی کنترل غیرخطی و بهینه این سیستم پیدا می کنید.
در پاسخ به سوالتون باید بگم که بله، شما می تونید بحث سوییچینگ رو برای کوادروتور به کار ببرید اما من شخصا هنوز روی این موضوع کار نکردم و نمی دونم اموزش های این همکارمون رو که نام بردید چقدر با ساختار سیستم کوادروتور مرتبط هست. شاید خود ایشون بهتر بتونند راهنماییتون کنند.
اما در کل بایستی همانطور که به دوستان دیگه هم که توصیه کردم برید مقالات سه سال گذشته 2017-2019 رو در رابطه با موضوع خودتون مثلا بحث سوییچینگ روی کوادروتور دانلود کنید و ببینید که چقدر این موضوع تکراری و یا جدید می تونه باشه. بعد با مطالعه اونها یک و یا چند ایده جدید بهشون اضافه کنید و همون رو به عنوان موضوعتون انتخاب کنید. البته در مجموعه اموزش مقاله نویسی همه این نکات رو خدمت دوستان عرض کردم.
موفق باشید.
حسین
سلام خانم دکتر ممنون از اموزشهای خوبتان.
خانم دکتر ببخشید من میخواستم جرم کوادروتورو متغیر فرض کنم و براش کنترل کننده تطبیقی لغزشی طراحی کنم ، فیلمهای اموزشی کوادروتور و چندتا از اموزشهای خوبتان را تهیه کرده ام، سوالم این هستش که علاوه بر این فیلم اموزشی برای انجام اینکارم کدوم فیلم اموزشی رو تهیه کنم کمکم میکند؟
مهندس بابایی
با سلام
از توجه شما به این مجموعه اموزشی ممنونیم.
فرمودین که فیلم های اموزش کوادروتور رو مشاهده کردید .بناراین الان دید خوبی باید نسبت به ساختار این سیستم و کنترل کننده های خظی و غیر خطی پایه که روی سیستم پیاده سازی شدند داشته باشید.
شما چون جرم رو می خوایید متغیر در نظر بگیرید بنابراین باید یک عدم قطعیت روی جرم سیستم تعریف کنید. من در زمینه cooprative control of Quadrotor چند مقاله دارم اما بحث جرم در انها در رابطه با جرم یک payload یا همان جسم مطرح شده است نه جرم خود کوادروتورها.
بنابراین می بایست دنبال مقالات 2019و 2018 و 2017 در رابطه با بحث mass of quadrotor و uncertain باشید که بتونید از انها ایده بگیرید و ببیند چگونه جرم متغیر را به صورت عدم قطعیت در سیستم تعریف کردند.همچنین در بحث تطبیقی و مد لغزشی هم می توانید از اموزش های سایر اساتید استفاده کنید که داخل سایت موجود می باشد.
البته تاکید می کنم که عدم قطعیت بحث کاربردی در رابطه با سیستم کوادروتور می باشد و ایده های جذابی از ان استخراج خواهید نمود.
موفق باشید.
محمد عبداله زاده
سلام خانم دکتر ممنون از اموزش های خوبتون خانم دکتر ببخشید ی سوال داشتم در قسمت poit to pointدر شبیه سازی ROSMC در بر نامه متلب برای محاسبهUCONTINUSE چرا از فرمول اسلاید که زحمت توضیح دادنش کشیدین استفاده نکردین ممنون میشم توضیح بدیناین قسمت برا من گیج کننده بود
مهندس بابایی
با سلام
از توجه شما به این مجموعه اموزشی ممنونیم.
ببینید دوست عزیز ، دقیقا همان تعریفی که در اسلایدها ( اسلاید شماره 29) برای Ucont به کار برده شده است، از همان تعریف در برنامه نویسی متلب نیز استفاده شده است.
همانطور که در فیلم اموزشی هم توضیح دادم، Ucont درواقع پاسخ معادله ریکاتی است که در برنامه متلب (خط 183 برنامه Point to point ) با G نشان داده شده است.
از انجا که برنامه متلب این روش ترکیبی کمی دشوار است ، توصیه می کنم بخش اول این مبحث که مربوط به توضیحات تیوری نحوه ترکیب SMC با SDRE هست رو با دقت بیشتری مجددا ملاحظه کنید تا ابهامات ان به طور کامل برای شما برطرف گردد.
موفق باشید.
mohsen
سلام خسته نباشید
چرا در جلسه 9 چترینگ در هیچ یک از نمودارا نیس ؟مگه امکان داره چترینگ کلا حذف شود ؟
مهندس بابایی
با سلام
ببینید مقدار چترینگ در حقیقت صفر نیست، بلکه بسیار بسیار کم است که صفر به نظر می رسد. این کاهش محسوس چترینگ ارتباط مستقیم با مقادیر الفا و k دارد. در واقع انتخاب دقیق این پارامترها کمک بسیار بزرگی در کاهش میزان چترینگ می نماید. در جلسه اموزشی نیز توضیح داده شد که این مقادیر با استفاده از روش بهینه سازی الگوریتم ژنتیک بر اساس دستیابی به کمترین خطای ممکن طراحی شده اند که نتیجه ان همین کاهش محسوس چترینگ است. همچنین توجه بفرمایید که در این قسمت هنوز external disturbance به سیستم وارد نشده است بنابراین کنترل سیستم با نتایج دلخواه تا حد زیادی هموار خواهد بود. برای درک بیشتر موضوع ، external disturbance را به سیستم اعمال کنید، خواهید دید میزان چترینگ برای شما محسوس خواهد بود، هرچند با تعیین دقیق پارامترهای مرتبط با ان، باز هم می توان تا حد زیادی بر میزان چترینگ غلبه نمود.
موفق باشید.
محمد
چطور باید external disturbance را روی سیستم اعمال کنیم ؟
مهندس بابایی
با سلام
از همان قسمتی که ورودی به سیستم اعمال می شود می تونید یک اغتشاش خارجی که فرمت های متفاوتی هم می تونه داشته باشه به سیستم اعمال کنید. توصیه می کنم ابتدا دامنه اغتشاش رو پایین در نظر بگیرید و کم کم تا جایی که کنترل کننده توانایی حذف اون رو داره، دامنه و فرکانس رو افزایش بدید.
موفق باشید.
سید وحید موسوی
با سلام
ممنون بابت این مجموعه ارزشمند
موردی هست که باید ازتون بپرسم. جلسه دوم دو فایل دپوشه فشرده شده وجود داره. یکی فایل پاور پوینت جلسه و دیگری فایلی با فرمت zpx. که حجمی حدود 100 مگابایت هم داره. اصلا نتونستم بازش کنم. اگر راهنمایی کنید ممنون میشم
مهندس بابایی
با سلام
از توجه شما به این مجموعه اوزشی ممنونیم.
ظاهرا برای با کردن فایل های تصویری باید نرم افزار پلیر خاصی رو از سایت دانلود بفرمایید. لطفا با پشتیبانی سایت تماس بگیرید تا شما رو راهنمایی کنند.
موفق باشید.
امید
باسلام
امکان ارایه آموزش در ارتباط با پرنده بالزن انعطاف پذیر هست براتون؟
ممنون
مهندس بابایی
با سلام
متاسفانه این موضوع در برنامه تدریس من نیست اما می تونید با توجه به ارتباط بین روابط دینامیکی پرنده بالزن و کوادروتور از اموزش های کوادروتور برای موضوع خودتون استفاده کنید که البته بحث مربوط به روابط ایرودینامیک پرواز هم تا حدودی بین اجسام پرنده مشترک هستش.
موفق باشید.
محمد
سلام خانوم مهندس
جلسات پایانی با توجه به شبیه سازی روش های معروف کنترلی و همچنین آموزش بهینه سازی عصبی بسیار آموزنده بود پیشنهاد میکنم همین کار ببا استفاده از روش pso و بهینه سازی در حالتی که شبیه سازی در سیمولینک انجام شده باشد هم انجام شود این موضوع به عنوان آموزش پایه ای و آموزشی در مقالات با موضوعات دیگر بسیار استفاده میشود
مهندس بابایی
با سلام
از حسن توجه شما به این مجموعه اموزشی ممنونیم.
اگر فرصت کنم حتما این موضوع هم اموزش داده خواهد شد.البته پیاده سازی PSO کار سختی نیست و دوستان با کمی مطالعه هم خودشون قادر به انجام این روش خواهند بود. از پیشنهاد شما ممنونیم.
موفق باشید.
علی
سلام
خانم مهندس من جلسه نهم اسلاید 8 رو متوجه نمیشم که سطوح لغزش رو بر حسب خطاها چرا اینطور گرفتید؟!!! مگر Sphi = de1 + k*e1 نیست؟ بعد خوده de1 = dXd1 – dX1 یا de1 = dXd1 – X2 و e1 = Xd1 – X1
پس چرا شما میگید Sphi = e2 – k*e1 ؟؟؟ اصلا e2 چطور اینجا اومد؟
اون فرمول ei+1 = dXid – Xi+1 رو نمیفهمم چطور بدست میاد؟؟!!!!!!
بعد هم (Sphi = dXd1 – X2 + a1*(Xd1 – X1 را قبول دارم ولی تو اسلاید اومده:
(Sphi = dXd1 – X2 + a1*(Xd1 – X2
و برای بقیه سطوح هم همین اشتباه تکرار شده !!!!!
مهندس بابایی
با سلام
ابتدا اینکه در فیلم اموزشی جلسات بعد توضیح داده شد که در این اسلاید یک اشتباه تایپی وجود دارد و هیچ ارتباطی به شبیه سازی ها ندارد. اگر دقت کنید در m-file های متلب بر اساس متغیرهای صحیح ، شبیه سازی ها انجام شده است.بنابراین تمام شبیه سازی ها درست هستند.
دوم هم اینکه فرمول ei+1 = dXid – Xi+1 دقیقا تعریف رابطه ریاضی اویلر(مشتق) هست که برای اطلاعات بیشتر می تونید به ریاضیات مهندسی مراجعه کنید.
سوم هم اینکه اگر به همین فرمول اویلر ei+1 = dXid – Xi+1 دقت کنید در واقع dei برابر با ei+1 = dxid – xi+1 هستش. یعنی شما به جای de1 تعریف معادل ان یعنی e2 یا dx1d-x2 رو جایگزین می کنید. بنابراین این سطوح مشتق به هر دو صورت نوشته شوند صحیح هستند. مثلا (Sphi=dx1d-x2+a1(x1d-x1 یا (Sphi=x1d-x1+a1(x1d-x1 هر دو صورت صحیح هستند.
موفق باشید.
علی
با سلام خدمت خانم مهندس
بخشید من قسمتی از شبیه سازی اسلایدینگ مد انجام شده در جلسه 9 رو متوجه نمیشم و اون تعریف متغییرهای حالت X8 و X10 هست!! اون مقادیر Ux و Uy در مدل فضای حالت کلی تعریفی بر حسب سینوس و کسینوس دارند. شما در توضیحات فرمودید که اینها بصورت مجازی تعریف شده اند و بصورت روابط گفته شده در خط 81 و 82 در ام فایل شبیه سازی آورده اید. ولی این ها ، آنهایی که باید در X8 و X10 بگذاریم نیستند!!!!
لطف بفرمایید توضیح بدید ممنون میشم
مهندس بابایی
با سلام
لطفا بیشتر دقت بفرمایید.
ببینید ما یک کنترل کننده اسلایدینگ مد طراحی کردیم. 6 سطح اسلاید برای 6 کنترل کننده مجزا.
اون زمانی که ux و uy بر حسب روابط سینوسی هستند برای موقعی هست که ما هنوز کنترل کننده طراحی نکردیم. بعد از تعریف کنترل کننده ، ما مطابق با u1 الی u4 برای ux وuy هم بر حسب سطوح اسلاید خودشون، به تعریفی جدید براشون می رسیم که وابسته به u1 هسند.. بنابراین دیگه شما نباید از تعریف قبلی اونها استفاده کنید، در غیر این صورت پس برای چی اصلا کنترل کننده 6 سطحی طراحی کردیم؟
موفق باشید.
محمد
ببخشید اما مگه مقادیر بدست آمده برای ux , uy جزو دینامیک سیستم نبودند؟ یا به بیان دیگه چطور میشود ux uy به مانند عملگر هر مقداری بگیرند و کاملا به فرم عملگر مجزا عمل کنند؟ لطفا توضیح دهید در حالت عملی و پیاده سازی شده ترم تعریف شده در شبیه سازی چطور پیاده سازی میشود؟ ممنونم
مهندس بابایی
با سلام
زمانی که به طراحی کنترل کننده می پردازیم همانطور که قبلا هم توضیح دادم از انها به عنوان کنترل کننده های مجازی استفاده می کنیم و پس از ان بله می توانند به طور مجزا به کنترل هر جز دلخواه از دینامیک سیستم بپردازند، این نوع استفاده از دینامیک سیستم به عنوان کنترل کننده مجازی، نوعی کانال کشی برداری محسوب می شود که در سیستم های UNDERACTUTED مانند کوادروتور کاملا منطقی و رایج است.
موفق باشید.
محمد
ممنون از پاسختون
اما هنوز این مساله که چطور این کانال مجازی عمل میکند رو متوجه نشدم
برای مثال ورودیهای u1-4 واضحا تعریف دارند و مستقیما بر روی سرعت روتورها تاثیر میذارند اما Ux , Uy با توجه به وجود ۴ عملگر به کجای کووادروتور وارد میشوند؟ و ما واقعا دسترسی داریم که هر تغییری بدهیم در حالی که جزوی از دینامیک اولیه بوده؟
مهندس بابایی
با سلام
ببینید شما باید مطالعه تون رو در این زمینه بیشتر کنید، تا می تونید تو این زمینه مقاله بخونید تا با رویکردهای مختلف در این راستا اشنا بشید. در ضمن هر تغییر دلخواهی نمیدیدم، ما تغییراتی رو ایجاد می کنیم که در راستای بک روش کنترلی منطقی هستن و بعد این تغییرات منجر به ناپایداری سیستم هم نشن. به خاطر همین شما هر ادعایی در راستای طراحی هر کنترل کننده ای که داشته باشید، ولو اینکه از دینامیک سیستم هم استفاده کرده باید با ادله لازم اثبات پایداری رو نشون بدید. همچنین لفظ کنترل کننده مجازی برای همین امر استفاده شده که از یک جایی به بعد این متغیرها صرفا دینامیک سیستم نیستند بلکه نقش مستقیم در کنترل و هدایت یک متغیر را دارند که این بار از طریق وابستگی خود به یک عملگر اصلی نه مجازی به اسم u1 این امر را انجام می دهند.
موفق باشید.