 مرجع مهندسی كنترل | دانش با کیفیت در مرز علم
مرجع مهندسی كنترل | دانش با کیفیت در مرز علم
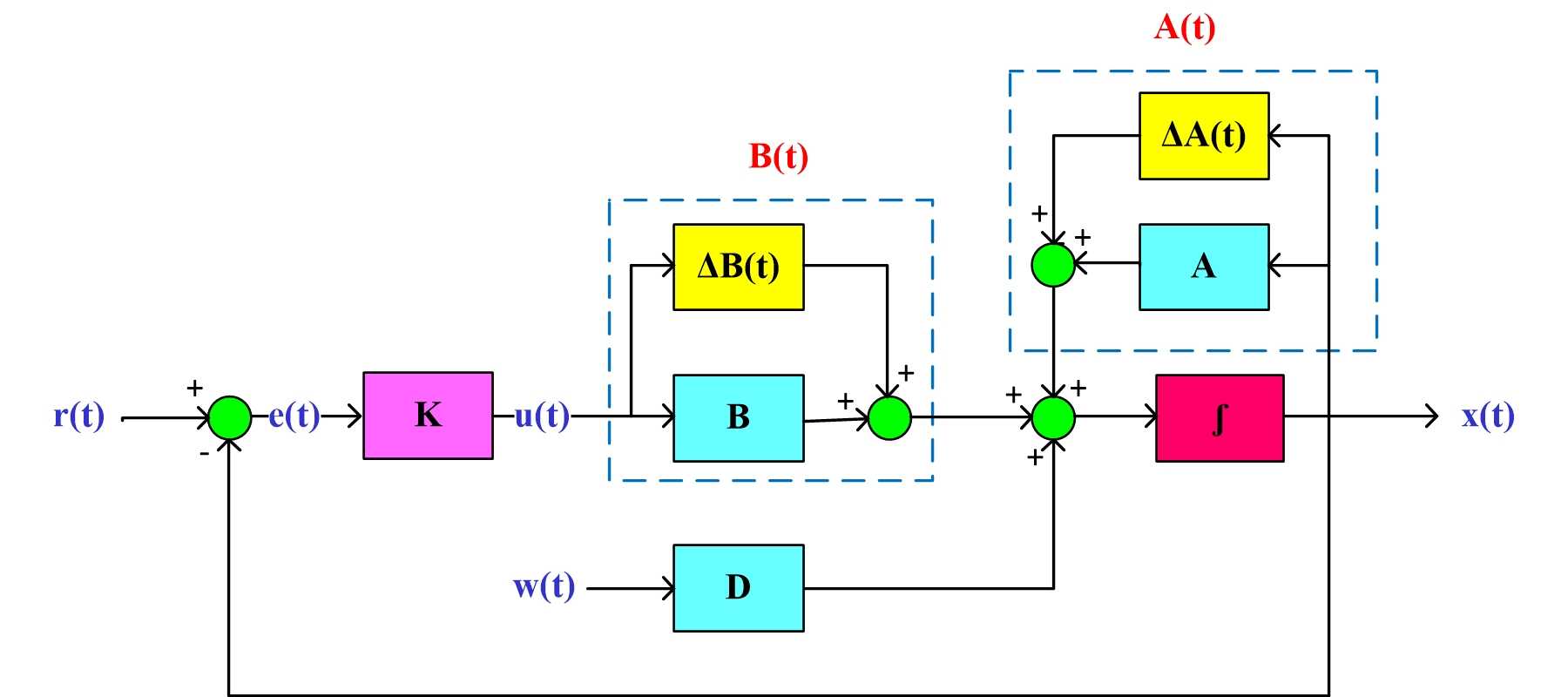
در سری فیلمهای قبلی موجود در سایت، کنترل مقاوم سیستمهای خطی تحت نامعینی پارامتری و کنترل مقاوم ∞H سیستمهای خطی دارای اغتشاش از طریق فیدبک حالت و با استفاده از نامساویهای ماتریسی خطی به صورت جداگانه مورد بررسی قرار گرفته و شروط LMI مورد نیاز برای هر دو مورد بدست آمد. خیلی از سیستمها به صورت همزمان تحت تأثیر نامعینی پارامتری و اغتشاش قرار دارند و بنابراین نمیتوان از LMI های بدست آمده در سری فیلمهای فوق برای این سیستمها استفاده کرد. در این سری جلسات برای این سیستمها که کلی تر هم هستند، LMI های مورد نیاز برای بدست آوردن بهره کنترل کننده فیدبک حالت جهت حذف اثر نامعینی پارامتری و همچنین تضعیف اغتشاش محاسبه خواهند شد. برای نشان دادن عملکرد خوب این کنترل کننده روش پیشنهادی روی سیستم تعلیق فعال خودرو پیاده شده و با حالت غیر فعال مقایسه شده است. امیدوارم مورد توجه شما قرار بگیرد…
پیشنیازها: آشنایی اولیه با جبر خطی و تئوری پایداری لیاپونوف – آشنایی با کدنویسی در محیط متلب – آشنایی با نامساویهای ماتریسی خطی (LMI)
قبل از دیدن ادامه پست، راهنمای استفاده از سری فیلمهای کنترل مقاوم را حتما ببینید:
جلسه اول:
فرمولبندی طراحی کنترل مقاوم فیدبک حالت برای سیستمهای دارای اغتشاش خارجی و نامعینی پارامتری و استخراج LMI های مورد نیاز
جلسه دوم:
پیادهسازی کنترلکننده مقاوم بر روی سیستم تعلیق فعال خودرو و شبیهسازی در متلب
قیمت اصلی: ۴۰۸,۰۰۰ تومان بود.۲۳۲,۸۰۰ تومانقیمت فعلی: ۲۳۲,۸۰۰ تومان.Add to cart
- لینک دانلود فایل بلافاصله بعد از پرداخت وجه به نمایش در خواهد آمد.
- همچنین لینک دانلود به ایمیل شما ارسال خواهد شد به همین دلیل ایمیل خود را به دقت وارد نمایید.
- ممکن است ایمیل ارسالی به پوشه اسپم یا Bulk ایمیل شما ارسال شده باشد.
- در صورتی که به هر دلیلی موفق به دانلود فایل مورد نظر نشدید با ما تماس بگیرید.






جعفر
سلام خسته نباشید.
آقای دکتر من مقاله 2007_Du_quarter_model_Hinf که شما استفاده کردید رو شبیه سازی کردم. ولی میخواستم بپرسم که آیا معادله شماره 8 را نیز تو شرط lmi بیاورم یا فقط معادله شماره 7؟
من معادله 8 رو تو شرط اوردم ولی خطا بینهایت میدهد(NON) میشود. میشه راهنمایی کنید
علی جوادی
سلام
من نامساویهای این مقاله رو حل نکردم و نمیدونم چه مشکلی ممکنه داشته باشه ولی اصولا باید همه نامساویهای قضیه باهم در نظر گرفته بشوند
علی
میشه با skyhookهم به همچین lmi هایی رسید که هم مقاوم و نامعینی رو کنترل کنه؟ .
علی جوادی
تا حالا همچین چیزی رو سرچ نکردم. اطلاع ندارم
علی
با سلام
تشکر از فیلمهای خوبتون
میشه با همین lmiهای بدست امده روی سیستم تعلیق نیمه فعال کنترل فیدبک حالت انجام داد؟ داخل فیلمها فرموید که نیمه فعال نیروی کنترلی مستقیما نداره. ایا بکار بردن فیبدبک حالت برای نیمه فعال اشتباه هست؟
یا اینکه میتوان بکار برد اما این منبع تولید نیرو ها متفاوته؟منظور همون u=kx هست .
علی جوادی
سلام
چیزی که من دیدم معمولا برای کنترل نیمه فعال سیستم تعلیق از کنترل skyhook استفاده میشه.
در این حالت نمیشه به صورت مستقل از ورودی کنترلی برای ایجاد نیرو استفاده کرد و فقط میشه دمپینگ رو تنظیم کرد.
تا جایی که من میدونم نمیشه از روشهای عادی (مثل روشهای ارائه شده در اینجا) به عنوان کنترل کننده استفاده کرد.
برای اطلاعات بیشتر لطفا skyhook و semi-active suspension رو سرچ کنید.
maede
سلام خسته نباشید. ببخشید منظورتون از اکتیو و پسیو توی شبیه سازی ها چی هست؟
علی جوادی
@maede,
سلام
پسیو یعنی بدون کنترل کننده و اکتیو با کنترل کننده.
برای اطلاعات بیشتر به مجموعه زیر مراجعه کنید:
https://www.controlref.com/suspension/
مهیار
با سلام خدمت تمامی دوستان محترم
اینجانب سید مهیار مهدی زاده مقدم شاگرد دکتر علی جوادی مفتخرم دستاورد جدید خودم رو که مدیون استاد عزیزم دکتر علی جوادی هستم را برای تمامی دوستان معرفی کنم .
کتاب مدلسازی و طراحی کنترل کننده کلاسیک و مقاوم برای توربین های بادی
نوشته اینجانب که برای اولین بار در ایران در زمینه مدلسازی و کنترل توربین های بادی نوشته شده را به همه دوستان و بالاخص استاد علی جوادی تقدیم میکنم .
لینک کتاب ثبت شده در کتابخانه ملی ایران
https://goo.gl/DnG2D1
احسان بادفر
سلام
در نظر داشتم روی یک سیستم الکترونیک قدرت که هم نا معین و هم در معرض اغتشاش است بر اساس آموزش ها شما کنترل کننده طراحی کنم فقط یه مشکلی داشتم و امیدوارم که شما بتونید به من کمک کنید .
اون هم این که ماتریس A متغیر با زمان به گونه ایست که من نمیتوانم به فرم نا معینی را مدل کنم
at=[a11t a12t 0 ; a21t a22t 0 ; 0 0 a33t]
در واقع دراین حالت نمی توانم ماتری MA & NA را بدست بیاورم
امیدرارم بتونم منظورم رو بروسنم
علی جوادی
@احسان بادفر,
سلام
تمام LMI های بدست آمده، شروط کافی هستند و بنابراین اگر شما بتوانید نامعینی رو به این شکل مدل کنید میتونید از این روش استفاده کنید.
برای حالتهایی مثل این، شاید بهتر باشه از روشهای تطبیقی استفاده کنید. خاصیت اصلی کنترل کنندههای تطبیقی، سازگار بودن و پایدار نگهداشتن سیستمهای متغیر با زمان است
یزدان
با سلام مجدد خدمت شما
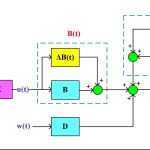
سوالی که داشتم این هست که شما در مسئله ردیابی دوتا فرض میکنید یکی اغتشاش رو با توجه به توضیحاتتون صفر در نظر میگیرید و یکی اینکه تغییرات سیگنال مرجع رو نزدیک به صفر میخواستم بدونم فرض دوم رو میشه در نظر نگرفت یا نه چون توی روش فرکانسی و نرم بینهایت میان و در سیگنال W ورودی مرجع و اغتشاش رو میزارن و در Z خطا و سیگنال کنترلی و طراحی رو انجام میدن (من رشتم کنترل نیست تسلطم کمه) آیا اونجا هم این محدودیت ها هست. یک سوال مدل سازی هم داشتم این که با توجه به شکل گرافیکی اول صفحه اگر اغتشاش با سیگنال خروجی جمع بشه یا مثلا نویز باهاش جمع بشه (شکل استاندارد کتاب دویل دوتا اغتشا داره) توی معادلات حالت چجوری واردشون میکنن.
پیشاپیش بخاطر طولانی شدن عذرخواهی میکنم
باتشکر بسیار زیاد از شما
علی جوادی
@یزدان,
با سلام و درود
در مورد سوال اول باید بگم که همون ایده رو میتونید اینجا هم استفاده کنید و سیگنال مرجع رو به w و خطای ردیابی رو به z اضافه کنید. البته در اینصورت باید ببینید LMI بدست اومده قابل حله یا نه.
روشی که داخل فیلمها توضیح داده شده فقط برای سیگنالهای مرجع ثابت یا با تغییرات خیلی کند قابل استفاده هستش اما روشی که شما پیشنهاد دادید ممکنه برای سیگنالهای با تغییرات زیاد هم قابل اعمال باشه. البته معمولا تابع تبدیل از ورودی مرجع به خروجی یک فیلتر پایین گذره و از یه فرکانسی به بعد دیگه ردیابی به خوبی انجام نمیشه.
در جواب سوال دوم هم باید بگم که من برای سادگی D21 رو صفر در نظر گرفتم ولی در حالت کلی میتونه صفر نباشه. شما میتونید D21 رو غیر صفر بگیرید و دقیقا به همون روش گفته شده در فیلمها، LMI مربوطه رو بدست بیارید. هدف من این بود که راهکار کلی رو ارائه بدم که اگر کسی خوب این موارد رو بفهمه، تغییرات جزیی مثل این مساله براش خیلی راحته
یزدان
با سلام و تشکر بسیار به خاطر آموزش عالیتون
میخواستم بدونم اگر بخواهیم علاوه بر اغتشاش و نامعینی های پارامتری ، نامعینی های بدون ساختار رو هم منظور کنیم معادلات استاندارد سیستم به شکلی در میاد که بتونیم LMI مورد نظر رو بدست بیاریم
علی جوادی
@یزدان,
با سلام و تشکر از لطف شما
اگر نامعینی بدون ساختار رو به شکل یک ترم غیرخطی با نرم محدود (مثلا لیپشیتز یا با سکتور محدود) فرض کنیم، میشه مساله رو به شکل LMI در آورد. البته شاید روشهای دیگه ای هم موجود باشه که من اطلاع ندارم
آنیتا
با سلام
تشکر می کنم از شما بابت آموزش های دقیق ، روان و مفهومی تون
بسیار مفید بود برای من
اگر ممکن هست اموزش کنترل مقاوم در حضور تاخیرزمانی رو هم قرار بدید.
با سپاس فراوان
علی جوادی
@آنیتا,
با سلام و تشکر از لطف شما
از اونجایی که سالهاست که در زمینه تاخیر مطالعه داشتم و یکی از موضوعات مورد علاقمه، من هم امیدوارم که بتونم هرچه زودتر موضوع جذاب تاخیر رو هم شروع کنم. در آینده قطعا به سیستمهای تاخیردار هم خواهم پرداخت ولی فعلا درگیر یک سری آموزشهای دیگه هستم و شاید به این زودی ها نشه به این موضوع بپردازم. لطفا کمی صبور باشید و به من مهلت بدید.
درود فراوان
سید مهیار مهدی زاده مقدم
با عرض سلام
بنده سید مهیار مهدی زاده هستم فارغ التحصیل رشته برق گرایش کنترل در مقطع ارشد .
با توجه به مطالعات کامل و دقیق مجموعه آموزشی کنترل کننده مقاوم Hinf با استفاده از ناتساوی های ماتریسی خطی ، توانستم تحلیل و شبیه سازی پایان نامه و موضوع تحقیق خود را انتخاب و با تایید هیات داوران با نمره عالی دفاع کنم .
با تشکر فراوان از آموزش بسیار بسیار بسیار دقیق و تحلیلی مدرس توانا این مجموعه آموزشی .
عنوان پایان نامه بنده :
طراحی و شبیه سازی کنترل کننده مقاوم برای حداکثر توان در توربین های بادی با استفاده از ناتساوی های ماتریسی خطی و ارائه رویکرد نوین خطی سازی
مدیر سایتادمین سایت
@سید مهیار مهدی زاده مقدم,
سلام
نظر لطف شماست آقای مهدی زاده. از شما ممنونیم بابت اینکه مارو فراموش نکردید
درود