این پست مربوط به جلسات مجموعه آموزشی مدلسازی و شبیه سازی 6 درجه آزادی هواپیما است. اصطلاح انگلیسی این عبارت 6DOF Aircraft Modeling and Simulation است. انجام تمامی روند، از مدلسازی و استخراج معادلات 6 درجه آزادی تا شبیه سازی و حل معادلات دیفرانسل غیرخطی این سیستم در نرم افزار متلب Matlab و سیمولینک simulink در این مجموعه با جرئیات شرح داده شده است.
در انجام پروژه ها، معمولاً سیستم یا مدلی انتخاب می شود تا به منظور طراحی کنترلر از آن استفاده شده و کنترلری بر روی آن اعمال نمود. در اغلب پروژه ها خصوصاً پروژه های کنترلی، این سیستم یک هواپیما فرض می شود. اما پیش از انجام هر کار لازم است دینامیک سیستم و رفتار متغیرهای آن بررسی و مورد ارزیابی قرار گرفته و از صحت مدل اطمینان حاصل نمود. بنابراین پس از استخراج معادلات، باید به اعتبارسنجی و صحت سنجی آن با روش های مختلف پرداخته و با منطق و ریاضیات و نیز مراجع موجود مقایسه شود که این موارد نیز در این سری از آموزش ها ارائه شده است.
جلسه اول:
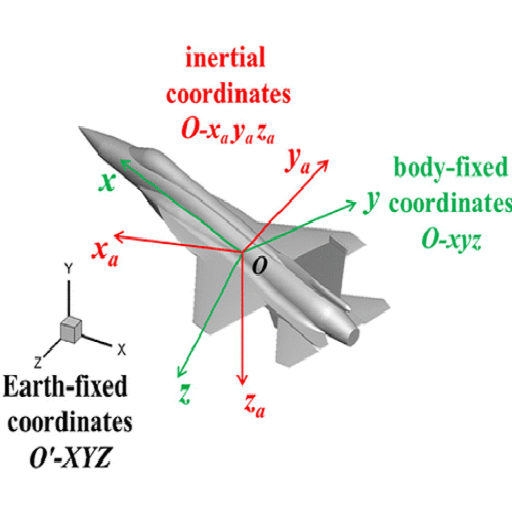
در این جلسه که اولین جلسه از “مجموعه آموزشی مدلسازی و شبیه سازی 6 درجه آزادی هواپیما” بوده، به توضیحات مقدماتی درباره ی مفاهیم ریاضی در مدلسازی، تعریف قاب و دستگاه مختصات و ماتریس های تبدیلِ دستگاه های مختصات پرداخته شده است.
علاوه بر این تعاریف که جزء ابزارهای لازم برای مدلسازی بوده، به تعریف زوایای اویلر نیز اشاره می شود. سپس فرضیات درنظر گرفته برای مدلسازی شرح داده شده و به بیان ورودی های کنترلی، متغیرهای سیستم و خروجی های معادلات پرداخته شده است. در ادامه، به منظور تدوین معادلات حرکت هواپیما، از قوانین نیوتون و اویلر استفاده کرده و با کمک تعاریف ارائه شده از قاب و دستگاه، به استخراج معادلات دیفرانسیل مربوط به سرعت های خطی بدنی و سرعت های زاویه ای بدنی پرداخته شده است. این معادلات شامل معادلات دیفرانسیل مربوط به مؤلفه های نیرو و گشتاورها در سه راستای x و y و z هستند.
مدت زمان: 1 ساعت
محتوا: فایل تصویری و پاورپوینت درس
پیش نمایش جلسه اول:
جلسه دوم:
در این جلسه که دومین جلسه از “مجموعه آموزشی مدلسازی و شبیه سازی 6 درجه آزادی هواپیما” بوده، به استخراج معادلات سینماتیک هواپیما پرداخته شده است.
در این قسمت، با تعریف ماتریس تبدیل بین دستگاه بدنی و اینرسی که تحت تبدیل زوایای اویلر به دست آمده، معادلات موقعیت های مکانی هواپیما در سه راستای x و y و z به دست می آید. سپس به ارتباط بین نرخ چرخش دستگاه مختصات اینرسی و بدنی پرداخته شده است و یک مجموعه معادلات دیفرانسیل برای سرعت های زاویه ای بدنی به دست می آید. بنابراین با توجه به 6 معادله ی نیرو و گشتاور که در جلسه قبل استخراج شده بود (معادلات نیوتون و اویلر)، مجموعه معادلات دیفرانسیلی کاملی به دست آمده که از آن می توان برای شبیه سازی استفاده نمود. در ادامه به توضیح پرواز مستقیم الخط پرداخته، نیروها و گشتاورها را در این حالت به دست آورده و در نهایت معادلات کاملی از پرواز حالت دائم Steady Rectilinear Flight به دست می آید که در جلسه بعد شبیه سازی آن انجام خواهد شد.
مدت زمان: 1 ساعت
محتوا: فایل تصویری و پاورپوینت درس
پیش نمایش جلسه دوم:
جلسه سوم:
در این جلسه که سومین جلسه از “مجموعه آموزشی مدلسازی و شبیه سازی 6 درجه آزادی هواپیما” بوده، ابتدا به تعریف شرایط تریم می پردازیم.
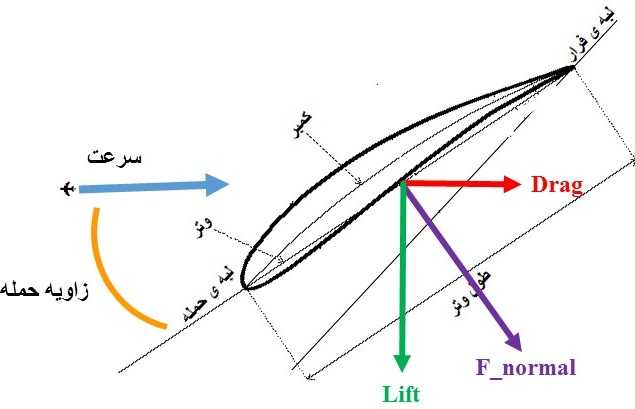
سپس به بازنویسی معادلات دیفرانسیل کلی هواپیما برای شرایط پرواز حالت دائم Steady State Flight پرداخته می شود که در آن نرخ تغییرات مؤلفه های سرعت خطی بدنی و مؤلفه های سرعت زاویه ای بدنی صفر هستند. در ادامه حرکت مستقیم الخط که یکی از مانورهای پرواز حالت دائم Steady State Flight بوده بررسی و توضیح داده می شود. در این شرایط پروازی، علاوه بر صفر بودن نرخ تغییرات سرعت خطی و بدنی، تغییرات زوایای اویلر و نیز سرعت های زاویه ای بدنی صفر هستند. با این شرایط تنها سرعت خطی بدنی و موقعیت های اینرسی آن از اهمیت برخوردار بوده و به نحوی، با صفر قرار دادن هر یک از مؤلفه های مربوط به نیروها و گشتاورها به حل معادلات پرداخته می شود. در این معادلات فرض می شود مشخصات جرمی و هندسی، پارامترهای ارتفاع، سرعت پرواز و نیز ضرایب ایرودینامیکی معلوم بوده و ورودی های کنترلی (زاویه الویتور، ایلرون و رادر)، زاویه حمله و زاویه لغزش و نیز تراست موتور، مجهولات معادلات هستند.
مدت زمان: 1 ساعت
محتوا: فایل تصویری، پاورپوینت درس، کدهای متلب
پیش نمایش جلسه سوم:
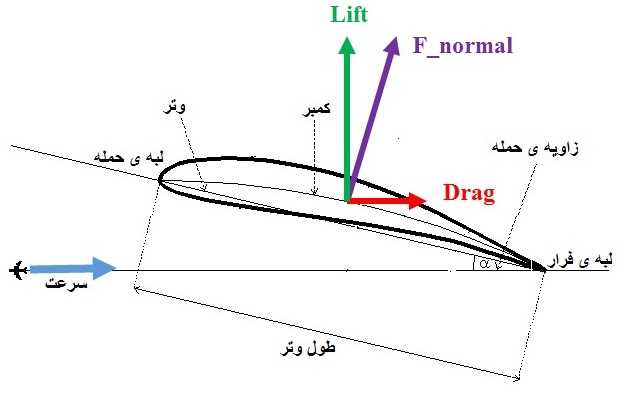
شکل مربوط به توضیح گذاشتن قدرمطلق برای زوایا در ادامه آمده است.
عکس اول
عکس دوم
جلسه چهارم:
در این جلسه که چهارمین جلسه از “مجموعه آموزشی مدلسازی و شبیه سازی 6 درجه آزادی هواپیما” بوده، ابتدا فرضیات معادلات حرکت هواپیما، متغیرهای حالت سیستم و ورودی و خروجی های آن مشخص می شوند.
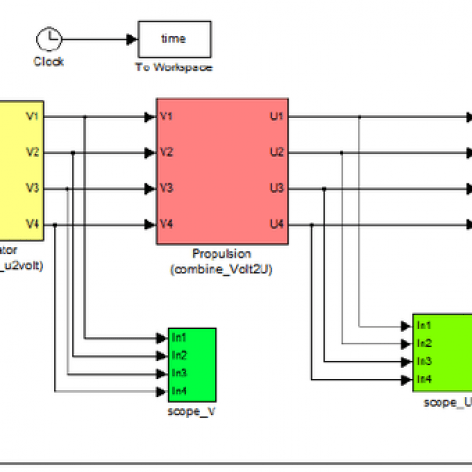
سپس طرح کلی نوشتن معادلات در سیمولینک ارائه می شود. سیمولینک مربوط به معادلات دارای بخش های مربوط به نیروها و گشتاورهای وزنی، نیروها و گشتاورهای ایرودینامیکی و نیز نیروها و گشتاورهای مربوط به موتور هستند. در انتها، تمامی این نیروها و گشتاورها برای معادلات نیوتون و اویلر استفاده خواهد شد. علاوه بر این معادلات (معادلات دیفرانسیل مربوط به سرعت های خطی و سرعت های زاویه ای)، معادلات مربوط به نرخ تغییر زوایای اویلر و نیز معادلات دیفرانسیل موقعیت های اینرسی نیز در بلوک مربوط به معادلات غیرخطی اضافه می شوند. در این جلسه تنها به استخراج معادلات مربوط به بخش نیروها و گشتاورهای وزنی و ایرودینامیکی پرداخته می شود. همچنین نکات لازم در نحوه نوشتن معادلات و دستگاه های مربوط به آن ها نیز با جزئیات شرح داده می شود.
مدت زمان: 1 ساعت و 15 دقیقه
محتوا: فایل تصویری، پاورپوینت درس، کدهای متلب
پیش نمایش جلسه چهارم:
جلسه پنجم:
در این جلسه که پنجمین جلسه از “مجموعه آموزشی مدلسازی و شبیه سازی 6 درجه آزادی هواپیما” بوده، به ادامه مدلسازی و شبیه سازی پرداخته شده است.
در این جلسه به تکمیل همه معادلات دیفرانسیل که شامل معادلات نیوتون، اویلر، معادلات مربوط به نرخ تغییرات زوایای اویلر و معادلات موقعیت های اینرسی هستند، پرداخته شده است. بدین منظور در سیمولینک موردنظر این معادلات بازنویسی خواهد شد. در ادامه، به شبیه سازی و صحت سنجی مدلسازی و شبیه سازی پرداخته خواهد شد. سناریوهای مورد نظر برای این کار، شبیه سازی در شرایط تریم و غیر تریم و نیز شبیه سازی با اضافه نمودن ضربه به ورودی الویتور صورت می گیرد. مشاهده می شود که در شرایط تریم همه متغیرها بر روی مقدار تریم باقی می ماند و در دو شرایط دیگر، متغیرها پس از مدتی اغتشاش، به مقدار تریم بازخواهند گشت.
مدت زمان: 50 دقیقه
محتوا: فایل تصویری، پاورپوینت درس، کدهای متلب
پیش نمایش جلسه پنجم:
جلسه ششم:
در این جلسه که ششمین جلسه از “مجموعه آموزشی مدلسازی و شبیه سازی 6 درجه آزادی هواپیما” بوده، ابتدا به توضیح پرواز اغتشاشی پرداخته شده است.
سپس به کمک نظریه اختلالات کوچک، خطی سازی معادلات غیرخطی (با تعریف فرضیات ساده کننده) انجام می شود. سپس به مقایسه این معادلات با معادلات پرواز دائم پرداخته می شود. همچنین نیروها و گشتاورها و نیز ضرایب و مشتقات ایرودینامیکی در این حالت (Perturbed) با شرایط Steady State مقایسه شده و توضیح داده می شود. در ادامه با استفاده از دستورهای موجود در نرم افزار MATLAB به خطی سازی معادلات غیرخطی (کد سیمولینک استخراج شده در جلسات قبل)، دکوپله کردن معادلات، به دست آوردن ریشه های معادله مشخصه ی هر کانال (طولی و عرضی-سمتی)، استخراج توابع تبدیل و نیز به دست آوردن صفرها و قطب های توابع تبدیل خواهیم پرداخت.
مدت زمان: 1 ساعت و 10 دقیقه
محتوا: فایل تصویری، پاورپوینت درس، کدهای متلب
پیش نمایش جلسه ششم:
جلسه هفتم:
در این جلسه که هفتمین جلسه از “مجموعه آموزشی مدلسازی و شبیه سازی 6 درجه آزادی هواپیما” بوده، به ادامه مباحث مدلسازی پرداخته شده است.
مباحث تکمیلی شامل مدل کردن تغییرات ضرایب ایرودینامیکی بر حسب متغیرهای مختلف از جمله ارتفاع و زاویه حمله، مدل کردن موتور و گشتاورهای ناشی از فاصله آن تا مرکز جرم و نیز مدلسازی روتور و اجزای گردنده در موتور است. همچنین به نحوه ی مدلسازی و شبیه سازی دو مورد در MATLAB و توضیحات آن پرداخته شده است.
مدت زمان: 50 دقیقه
محتوا: فایل تصویری، پاورپوینت درس، کدهای متلب
پیش نمایش جلسه هفتم :
مطالعه بیشتر
 مرجع مهندسی كنترل | دانش با کیفیت در مرز علم
مرجع مهندسی كنترل | دانش با کیفیت در مرز علم



{kind=link}
{kind=link}
saber
با سلام
می شود لطف کنید لینک دانلود آموزشی را دوباره برای بنده ایمیل کنید
ممنونتون می شوم
مهندس رشیدی
ارسال شد.
مهندس رشیدی
سلام
آیا از طریق ایمیل دریافت نکردید؟
saber
با سلام
امکانش هست از خروجی theta به ورودی deltaE فیدبک بگیریم؟
به چه صورت می توانیم در سیمولینک این کار را انجام دهیم
سپاس
مهندس رشیدی
سلام
در توابع داخل سیمولینک تتا را به عنوان خروجی تعریف کنید و بدین ترتیب می توان از تفاضل آن با مقدار مطلوب برای آن کنترلر طراحی نمود و به عنوان ورودی الویتور به سیستم اعمال کرد.
reza
سلام
ببخشید این دوره کلا شش جلسست و تمام شده؟؟؟
مهندس رشیدی
سلام
خیر ادامه دارد. البته در ادامه شاید عنوان دیگری انتخاب شود. بحث بعدی تکمیل مدلسازی و نیز بحث های پایداری و کنترل است.
saber
با سلام
بخش طراحی کنترل کننده هنوز آماده نشده؟
مهندس رشیدی
سلام
در حال آماده سازی است.
Saber
کار خاصی قرار نیست بکنم…. قراره یک کنترلر PID استفاده کنم و ضرایب آن را بدست بیارم
مهندس رشیدی
بله همین مسئله رو در جلسات بعد حل خواهیم کرد ولی مختصری باید راجع به پایداری و کنترل و فلسفه اون بگم و بعد به کنترل برسم.
saber
پس میتونید راهنماییم کنید؟یا اگر سوالی داشتم ازتون بپرسم؟
مهندس رشیدی
اگر مواردی باشه که تسلط داشته باشم، بله.
saber
با سلام
برنامه ای هم برای بررسی کنترلر آن را هم دارید؟
مهندس رشیدی
بله بخش دیگری در حال آماده سازی است.
saber
@مهندس رشیدی, فکر میکنید چه زمانی در سایت قرار بگیرد؟
چون خیلی میتونه به پایان نامه من کمک بکنه …اگر بتونید زمانش را مشخص کنید ممنونتون میشم.
مهندس رشیدی
سلام
دقیق مطمئن نیستم…
دفاعتون چه تاریخی هست؟
saber
@مهندس رشیدی, اگر بخوام این ترم دفاع کنم باید تا آخر هفته دیگه بخش کنترلر این بخش را تحویل بدم
مهندس رشیدی
متأسفانه بعید میدونم…
صالح
سلام
بنده وقتی معادله و توی متلب مینوسیم ، آخرش همون مقدار اولیه ها رو به عنوان جواب به من میده !
در مقابل عبارت fval توی حل هم فقط دو تا کروشه میذاره….
البته چند خط قبل از ارائه جواب ها هم عبارت زیر رو میاره…
مشکل از کجاست ؟
Equation solved at initial point.
fsolve completed because the vector of function values at the initial
point is near zero as measured by the default value of the function tolerance,
and the problem appears regular as measured by the gradient.
صالح
@صالح,
این عبارت هم در سطر اول ظاهر میشه :
Warning: Trust-region-dogleg algorithm of FSOLVE cannot handle non-square systems; using Levenberg-Marquardt algorithm
instead.
> In fsolve at 285
In Trim at 84
مهندس رشیدی
سلام
لطفا کد رو ارسال کنید ولی warning خطا محسوب نمیشه و میشه آن ها را با دستوراتی fix کرد.
مهندس رشیدی
سلام
لطفاً کد رو ارسال کنید.
متشکرم
saber
@مدیر سایت,
سلام با تشکر
می شود لطف کنید فایل کتاب مرجع را هم برای ایمیلم ارسال کنید؟
saber
@saber,
یا اگر مقاله ای هم دارید خیلی خوب میشه
مهندس رشیدی
سلام
مراجع در جلسه اول اضافه شده اند.
مهندس رشیدی
@saber,
سلام
مراجع در جلسه اول اضافه شده اند.
saber
@مهندس رشیدی,
بله دریافت شد
سپاس
saber
با سلام
من قبلا هزینه کردم و تمام قسمت ها را دانلود کردم الان لپ تاپم را عوض کردم و میخوام دوباره دان کنم میگه لینک دانلود شما منقضی شده یعنی دوباره باید هزینش را بپردازم؟
مدیر سایتادمین سایت ( مالک تایید شده )
@saber,
سلام
لینکها دوباره به ایمیلتون فرستاده شد.