این پست مربوط به جلسات مجموعه آموزشی مدلسازی و شبیه سازی 6 درجه آزادی هواپیما است. اصطلاح انگلیسی این عبارت 6DOF Aircraft Modeling and Simulation است. انجام تمامی روند، از مدلسازی و استخراج معادلات 6 درجه آزادی تا شبیه سازی و حل معادلات دیفرانسل غیرخطی این سیستم در نرم افزار متلب Matlab و سیمولینک simulink در این مجموعه با جرئیات شرح داده شده است.
در انجام پروژه ها، معمولاً سیستم یا مدلی انتخاب می شود تا به منظور طراحی کنترلر از آن استفاده شده و کنترلری بر روی آن اعمال نمود. در اغلب پروژه ها خصوصاً پروژه های کنترلی، این سیستم یک هواپیما فرض می شود. اما پیش از انجام هر کار لازم است دینامیک سیستم و رفتار متغیرهای آن بررسی و مورد ارزیابی قرار گرفته و از صحت مدل اطمینان حاصل نمود. بنابراین پس از استخراج معادلات، باید به اعتبارسنجی و صحت سنجی آن با روش های مختلف پرداخته و با منطق و ریاضیات و نیز مراجع موجود مقایسه شود که این موارد نیز در این سری از آموزش ها ارائه شده است.
جلسه اول:
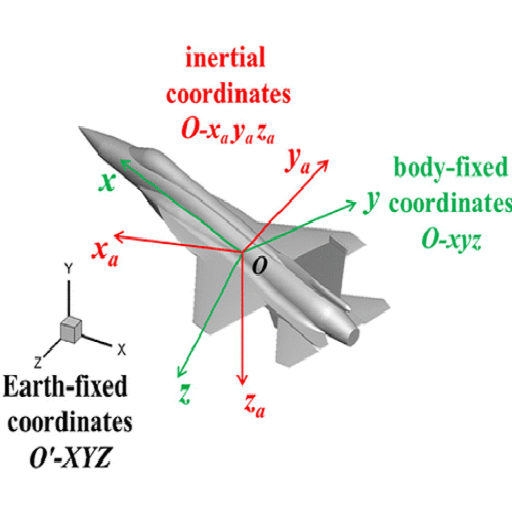
در این جلسه که اولین جلسه از “مجموعه آموزشی مدلسازی و شبیه سازی 6 درجه آزادی هواپیما” بوده، به توضیحات مقدماتی درباره ی مفاهیم ریاضی در مدلسازی، تعریف قاب و دستگاه مختصات و ماتریس های تبدیلِ دستگاه های مختصات پرداخته شده است.
علاوه بر این تعاریف که جزء ابزارهای لازم برای مدلسازی بوده، به تعریف زوایای اویلر نیز اشاره می شود. سپس فرضیات درنظر گرفته برای مدلسازی شرح داده شده و به بیان ورودی های کنترلی، متغیرهای سیستم و خروجی های معادلات پرداخته شده است. در ادامه، به منظور تدوین معادلات حرکت هواپیما، از قوانین نیوتون و اویلر استفاده کرده و با کمک تعاریف ارائه شده از قاب و دستگاه، به استخراج معادلات دیفرانسیل مربوط به سرعت های خطی بدنی و سرعت های زاویه ای بدنی پرداخته شده است. این معادلات شامل معادلات دیفرانسیل مربوط به مؤلفه های نیرو و گشتاورها در سه راستای x و y و z هستند.
مدت زمان: 1 ساعت
محتوا: فایل تصویری و پاورپوینت درس
پیش نمایش جلسه اول:
جلسه دوم:
در این جلسه که دومین جلسه از “مجموعه آموزشی مدلسازی و شبیه سازی 6 درجه آزادی هواپیما” بوده، به استخراج معادلات سینماتیک هواپیما پرداخته شده است.
در این قسمت، با تعریف ماتریس تبدیل بین دستگاه بدنی و اینرسی که تحت تبدیل زوایای اویلر به دست آمده، معادلات موقعیت های مکانی هواپیما در سه راستای x و y و z به دست می آید. سپس به ارتباط بین نرخ چرخش دستگاه مختصات اینرسی و بدنی پرداخته شده است و یک مجموعه معادلات دیفرانسیل برای سرعت های زاویه ای بدنی به دست می آید. بنابراین با توجه به 6 معادله ی نیرو و گشتاور که در جلسه قبل استخراج شده بود (معادلات نیوتون و اویلر)، مجموعه معادلات دیفرانسیلی کاملی به دست آمده که از آن می توان برای شبیه سازی استفاده نمود. در ادامه به توضیح پرواز مستقیم الخط پرداخته، نیروها و گشتاورها را در این حالت به دست آورده و در نهایت معادلات کاملی از پرواز حالت دائم Steady Rectilinear Flight به دست می آید که در جلسه بعد شبیه سازی آن انجام خواهد شد.
مدت زمان: 1 ساعت
محتوا: فایل تصویری و پاورپوینت درس
پیش نمایش جلسه دوم:
جلسه سوم:
در این جلسه که سومین جلسه از “مجموعه آموزشی مدلسازی و شبیه سازی 6 درجه آزادی هواپیما” بوده، ابتدا به تعریف شرایط تریم می پردازیم.
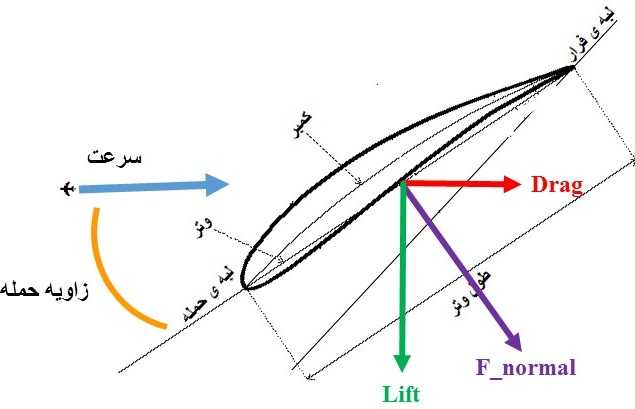
سپس به بازنویسی معادلات دیفرانسیل کلی هواپیما برای شرایط پرواز حالت دائم Steady State Flight پرداخته می شود که در آن نرخ تغییرات مؤلفه های سرعت خطی بدنی و مؤلفه های سرعت زاویه ای بدنی صفر هستند. در ادامه حرکت مستقیم الخط که یکی از مانورهای پرواز حالت دائم Steady State Flight بوده بررسی و توضیح داده می شود. در این شرایط پروازی، علاوه بر صفر بودن نرخ تغییرات سرعت خطی و بدنی، تغییرات زوایای اویلر و نیز سرعت های زاویه ای بدنی صفر هستند. با این شرایط تنها سرعت خطی بدنی و موقعیت های اینرسی آن از اهمیت برخوردار بوده و به نحوی، با صفر قرار دادن هر یک از مؤلفه های مربوط به نیروها و گشتاورها به حل معادلات پرداخته می شود. در این معادلات فرض می شود مشخصات جرمی و هندسی، پارامترهای ارتفاع، سرعت پرواز و نیز ضرایب ایرودینامیکی معلوم بوده و ورودی های کنترلی (زاویه الویتور، ایلرون و رادر)، زاویه حمله و زاویه لغزش و نیز تراست موتور، مجهولات معادلات هستند.
مدت زمان: 1 ساعت
محتوا: فایل تصویری، پاورپوینت درس، کدهای متلب
پیش نمایش جلسه سوم:
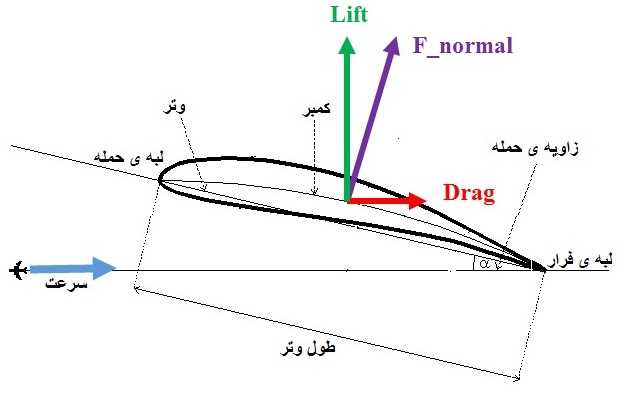
شکل مربوط به توضیح گذاشتن قدرمطلق برای زوایا در ادامه آمده است.
عکس اول
عکس دوم
جلسه چهارم:
در این جلسه که چهارمین جلسه از “مجموعه آموزشی مدلسازی و شبیه سازی 6 درجه آزادی هواپیما” بوده، ابتدا فرضیات معادلات حرکت هواپیما، متغیرهای حالت سیستم و ورودی و خروجی های آن مشخص می شوند.
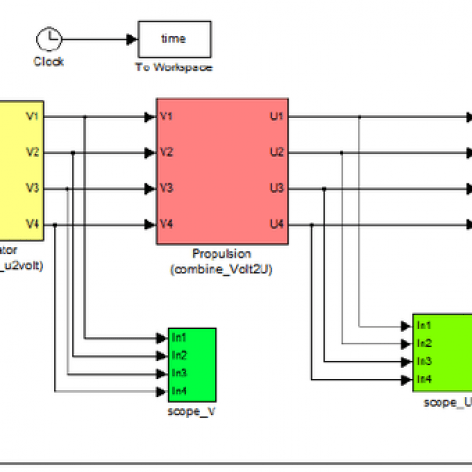
سپس طرح کلی نوشتن معادلات در سیمولینک ارائه می شود. سیمولینک مربوط به معادلات دارای بخش های مربوط به نیروها و گشتاورهای وزنی، نیروها و گشتاورهای ایرودینامیکی و نیز نیروها و گشتاورهای مربوط به موتور هستند. در انتها، تمامی این نیروها و گشتاورها برای معادلات نیوتون و اویلر استفاده خواهد شد. علاوه بر این معادلات (معادلات دیفرانسیل مربوط به سرعت های خطی و سرعت های زاویه ای)، معادلات مربوط به نرخ تغییر زوایای اویلر و نیز معادلات دیفرانسیل موقعیت های اینرسی نیز در بلوک مربوط به معادلات غیرخطی اضافه می شوند. در این جلسه تنها به استخراج معادلات مربوط به بخش نیروها و گشتاورهای وزنی و ایرودینامیکی پرداخته می شود. همچنین نکات لازم در نحوه نوشتن معادلات و دستگاه های مربوط به آن ها نیز با جزئیات شرح داده می شود.
مدت زمان: 1 ساعت و 15 دقیقه
محتوا: فایل تصویری، پاورپوینت درس، کدهای متلب
پیش نمایش جلسه چهارم:
جلسه پنجم:
در این جلسه که پنجمین جلسه از “مجموعه آموزشی مدلسازی و شبیه سازی 6 درجه آزادی هواپیما” بوده، به ادامه مدلسازی و شبیه سازی پرداخته شده است.
در این جلسه به تکمیل همه معادلات دیفرانسیل که شامل معادلات نیوتون، اویلر، معادلات مربوط به نرخ تغییرات زوایای اویلر و معادلات موقعیت های اینرسی هستند، پرداخته شده است. بدین منظور در سیمولینک موردنظر این معادلات بازنویسی خواهد شد. در ادامه، به شبیه سازی و صحت سنجی مدلسازی و شبیه سازی پرداخته خواهد شد. سناریوهای مورد نظر برای این کار، شبیه سازی در شرایط تریم و غیر تریم و نیز شبیه سازی با اضافه نمودن ضربه به ورودی الویتور صورت می گیرد. مشاهده می شود که در شرایط تریم همه متغیرها بر روی مقدار تریم باقی می ماند و در دو شرایط دیگر، متغیرها پس از مدتی اغتشاش، به مقدار تریم بازخواهند گشت.
مدت زمان: 50 دقیقه
محتوا: فایل تصویری، پاورپوینت درس، کدهای متلب
پیش نمایش جلسه پنجم:
جلسه ششم:
در این جلسه که ششمین جلسه از “مجموعه آموزشی مدلسازی و شبیه سازی 6 درجه آزادی هواپیما” بوده، ابتدا به توضیح پرواز اغتشاشی پرداخته شده است.
سپس به کمک نظریه اختلالات کوچک، خطی سازی معادلات غیرخطی (با تعریف فرضیات ساده کننده) انجام می شود. سپس به مقایسه این معادلات با معادلات پرواز دائم پرداخته می شود. همچنین نیروها و گشتاورها و نیز ضرایب و مشتقات ایرودینامیکی در این حالت (Perturbed) با شرایط Steady State مقایسه شده و توضیح داده می شود. در ادامه با استفاده از دستورهای موجود در نرم افزار MATLAB به خطی سازی معادلات غیرخطی (کد سیمولینک استخراج شده در جلسات قبل)، دکوپله کردن معادلات، به دست آوردن ریشه های معادله مشخصه ی هر کانال (طولی و عرضی-سمتی)، استخراج توابع تبدیل و نیز به دست آوردن صفرها و قطب های توابع تبدیل خواهیم پرداخت.
مدت زمان: 1 ساعت و 10 دقیقه
محتوا: فایل تصویری، پاورپوینت درس، کدهای متلب
پیش نمایش جلسه ششم:
جلسه هفتم:
در این جلسه که هفتمین جلسه از “مجموعه آموزشی مدلسازی و شبیه سازی 6 درجه آزادی هواپیما” بوده، به ادامه مباحث مدلسازی پرداخته شده است.
مباحث تکمیلی شامل مدل کردن تغییرات ضرایب ایرودینامیکی بر حسب متغیرهای مختلف از جمله ارتفاع و زاویه حمله، مدل کردن موتور و گشتاورهای ناشی از فاصله آن تا مرکز جرم و نیز مدلسازی روتور و اجزای گردنده در موتور است. همچنین به نحوه ی مدلسازی و شبیه سازی دو مورد در MATLAB و توضیحات آن پرداخته شده است.
مدت زمان: 50 دقیقه
محتوا: فایل تصویری، پاورپوینت درس، کدهای متلب
پیش نمایش جلسه هفتم :
مطالعه بیشتر
 مرجع مهندسی كنترل | دانش با کیفیت در مرز علم
مرجع مهندسی كنترل | دانش با کیفیت در مرز علم



{kind=link}
{kind=link}
مهدی
سلام
ممنون از کار خوبتون
خانم مهندس منظور از معادلات ۶درجه آزادی به صورت کامل یعنی چی شما که ۱۲ عدد متغیر در نظر گرفتین میشه این مورد رو توضیح بدین؟
مهندس رشیدی
سلام
خواهش میکنم
منظور از شش درجه آزادی، حرکت یک جسم صلب در فضا است، اینکه به سمت جلووعقب، بالاوپایین، چپ و راست حرکت کنه سه درجه است، چرخش ها هم حول سه محور سه درجه دیگر. منظور نوع حرکت و میزان آزادی هست. 12 تعداد مجهولات و معادلات است.
مهدی
ببخشین من فایل کامل رو خریداری کردم ولی در جلسه آخر یه قسمتی میمونه که میگین جلسه بعد توضیح میدین اون جلسه پس کجاست؟
مهندس رشیدی
سلام
متاسفانه آماده نشده است
مهدی
سلام
من کل فایل رو خریداری کردم و ایمیل تایید و نشانی دانلود برام ارسال شده ولی پسورد فایل ها ارسال نشده لطف کنین پیگیری کنین.
ممنون
مهندس رشیدی
سلام
ارسال شد.
Mohsen
سلام وقت بخیر
من مدل سازی و شبیه سازی ۶درجه آزادی هواپیما رو خریداری کردم
ولی پسورد خارج کردن از حالت فشرده و پسورد بری نمایش برام نیومده
ممنون میشم پیگیری کنید
مهندس رشیدی
سلام. ارسال شد
حمیدرضا
سلام…من فایل ها رو تهیه کردم. ولی پسوورد ندارم…چه کار باید کرد؟
مدیر سایتادمین سایت ( مالک تایید شده )
AC_MS_1
به همین ترتیب برای هر جلسه عدد آخر عوض میشه
رضا
با سلام خدمت مهندس رشیدی
بنده یه سوال درباره قسمت ۶ آموزش داشتم.
در قسمت مقایسه نیروها و گشتاورهای طولی پرواز حالت دائم و اغتشاشی، اشاره به متفاوت بودن ضرایب آیرودینامیکی در حالت اغتشاشی داشتید. اما این تفاوت ها رو به صورت کامل در کد لحاظ نکردید.
برای مثال برای درگ، ترم Cl1 هم داریم. اما شما این ضریب رو در نظر نگرفتید.
اگه ممکنه یه نگاهی بندازید و بفرمایید که دلیل خاصی داشته یا احیانا از قلم افتاده.
با تشکر
مهندس رشیدی
سلام
در کد شبیه سازی شده مدل به صورت کامل آمده که مجموع حالت اغتشاشی و دائم هست.
کوروش
با سلام
شبیه سازی اجرا نمیشود .
پس از اجرا پیغام VIEW 2 WARNINGS میدهد که بعد از کلیک روی آن هیچ خطایی را نمایش نمیدهد
مهدی کریم خانی
سلام خانم مهندس
من ورژن متلبم 2016a است و شما در ورژن 2016b کد نویسی و ساخت مدل سیمولینک را انجام دادید و من نمی تونم مدل را باز کنم.
امکانش هست مدل سیمولینک را به گونه این سیو کنید که در تمام ورژن های متلب باز بشه و دوباره برای من ارسال کنید.
با تشکر
عباس
با سلام. من جلسه اول را به صورت اینترنتی دانلود کردم فایل نیاز به \سوورد دارد و برایم ارسال نشده چیکار کنم؟
مدیر سایتادمین سایت ( مالک تایید شده )
سلام خدمت شما .جناب لطفا با پشتیبانی سایت ارتباط برقرار کنید یا به تلگرام پیام بدهید.تشکر
احمد
سلام و وقت بخیر
اولا تشکر کنم از آموزش خوبتون.
يک سوال داشتم و اينکه اگه بخواهيم معادلات ديناميک و ايروديناميک براي اجسام پرنده بالزن را استخراج کنيم ، به چه صورتي بايد عمل شود؟
مطمينا پايه همه معادلات همين معادلات در حالت بال ثابت(هواپيما) خواهد بود اما اگر در حالت بالزن هم بفرماييد ممنون ميشم.
اگر ويدئو يا دست نوشته اي در اين مورد منتشر کنين ممنون ميشم. البته بنده قدري ضيق وقت هم دارم.
باتشکر
مهندس رشیدی
سلام
درمورد بالزن، بخش نیرو و گشتاور ایرو متفاوت خواهد بود که با سرچ مقالات بسیاری در این زمینه پیدا خواهید کرد.
مهدی خوش سرور
salam man in file ro az site kharidam va dakhel khode site az sabade kharid mablaghesho pardakht kardam 56000 toman vali hich file downloadi entehaye pardakht nabud va vasam email ham nashod lotf konid begid chikar konam
shomareye pardakhtam 11368 va shomareye tarakoneshe banki 51598734429 hastesh
مدیر سایتادمین سایت ( مالک تایید شده )
@مهدی خوش سرورسلام . وقت بخیر . براتون ارسال کردم