آموزش مد لغزشی طبق کتاب اسلوتین
در این پست فیلم آموزش مد لغزشی طبق کتاب اسلوتین قرار داده میشود. کتاب اسلوتین رو اگه خونده باشید متوجه خواهید شد که بسیاری از مطالب این فصل گنگ هستند و نیاز به توضیحات بیشتر دارن. ضمن اینکه به نظر من بعضی از مطالب این کتاب بعد از اینکه فصل به پایان رسید باید باز هم در موردشون بحث بشه اما توی کتاب این امکان وجود نداره . از طرفی مثال هایی در این کتاب وجود داره که اگه با روند شبیه سازی اون ها هم آشنا بشیم در یادگیری این روش جذاب بسیار موثره. من مد لغزشی رو بارها و بارها بر روی سیستم های مختلف شبیه سازی کردم و مقالات زیادی در این زمینه کار کردم.
چیزی که من تضمین میدم اینه که بعد از این دوره آموزشی، به نتایج زیر خواهید رسید:
مد لغزشی رو به طور کامل و فراتر از مطالب کتاب درک خواهید کرد
با نحوه شبیه سازی مثال ها و بحث روی آنها کاملا آشنا خواهید شد
نحوه تلفیق این روش با روش هایی مثل فازی، ژنتیک و … رو خواهید آموخت (مد لغزشی فازی در همین سایت قرار داده شده است برای دانلود این فیلم آموزشی کلیک بفرمایید)
پیاده سازی این روش بر روی سیستم های غیرخطی پیچیده و شبیه سازی آنها رو یاد خواهید گرفت.
میتونید برای سیستم خودتون این شبیه سازی ها رو انجام بدید
مقالات مختلف رو که در زمینه مد لغزشی هستن میتونید براحتی درک کنید.
تفاوت این آموزش با آموزش دیگری تحت عنوان “آموزش مد لغزشی از طراحی تا شبیه سازی“ که در سایت قرار داده شده در این هست که آموزشی که در این پست قرار داره برای افرادیه که میخوان با عمق بیشتری مد لغزشی رو یاد بگیرن و اون آموزش برای کسیه که اطلاعات بسیار ناچیزی از مد لغزشی داره و فقط میخواد روی یه سیستم ساده یک مد لغزشی ساده رو پیاده کنه. اما در اینجا هم با مباحث بیشتری آشنا خواهید شد و هم مطالب با عمق بیشتری ذکر خواهند شد. همچنین یک “جزوه کاربردی مد لغزشی“ نیز در این سایت قرار داده شده است که همونطور که از اسمش معلومه فقط حالت کاربردی داره.
جلسه اول:
مقدمات و تبدیل مسئله مرتبه n به مسئله مرتبه یک
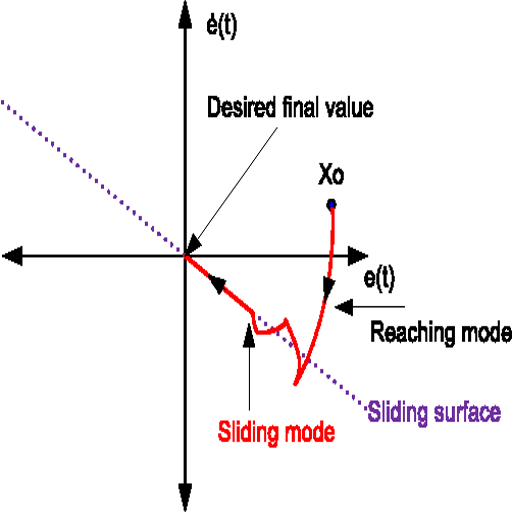
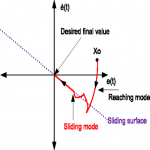
در این جلسه در مورد صورت مسئله مد لغزشی، انواع نامعینی، سطوح لغزشی و از همه مهمتر تبدیل مسئله مرتبه ان به مسئله مرتبه یک در مد لغزشی پرداخته شده است. در ادامه کلا در ارتباط با اینکه چطور میتوان یک مسئله ردیابی مرتبه ان رو به یک مسئله پایدارسازی از مرتبه یک (سطح سوئیچینگ) تبدیل کرد بحث کرد.
مدت زمان آموزش: 67 دقیقه
محتویات دانلود : فیلم، پاورپوینت درس
جلسه دوم:
شرط لغزشی ، فیلیپف دینامیک معادل
مبحث ناتمام جلسه قبل در این جلسه به اتمام میرسد. سپس در مورد شرط لغزش به طول مفصل بحث میشود همچنین در ادامه پدیده چترینگ توضیح داده شده است و در نهایت به توضیح فیلیپف و دینامیک معادل پرداخته شده است. دقت کنید این مطلب در کتاب اصلا بخوبی تفسیر داده نشده است.
مدت زمان آموزش: 55 دقیقه
محتویات دانلود : فیلم، پاورپوینت درس
جلسه سوم:
نحوه طراحی و شبیه سازی مد لغزشی به صورت گام به گام
در این جلسه ابتدا یک الگوریتم برای طراحی مد لغزشی ارائه شده است. این الگوریتم به صورت واضح بیان شده است و به صورت مفصل در مورد آن بحث شده است. مباحثی از قبیل نحوه انتخاب سطح لغزش، چرا سطح لغزش به فرمی که در کتاب است در نظر گرفته می شود؟ چرا در همه مقالات به این فرم نیست و ….. و در ادامه با یک مثال تک ورودی و تک خروجی ابتدا طراحی به طور کامل و براساس الگوریتمی که در ابتدای جلسه گفته شد انجام میشود و سپس این مثال در نرم افزار MATLAB شبیه سازی شده است. و در پایان، به بحث در مورد پارامتر های طراحی در این نرم افزار پرداخته شده است.
مدت زمان آموزش: 55 دقیقه
محتویات دانلود : فیلم، پاورپوینت درس و ام فایل مربوط به درس
جلسه چهارم:
طراحی و شبه سازی مد لغزشی برای سیستم های مرتبه دو و سه
در این جلسه طراحی کنترل کننده مد لغزشی و شبیه سازی آن در نرم افزار MATLAB برای دو سیستم مرتبه دو و سه انجام شده است. یکی از بحث های مهم طراحی مد لغزشی یعنی تبدیل هر سیستم غیرخطی به سیستم مرتبه دوم استاندارد به طور مفصل بحث شده است. همچنین مباحث تکمیلی در مورد تعریف سطح لغزش در مثال مربوط به سیستم مرتبه سه ذکر شذه است.
مدت زمان آموزش: 66 دقیقه
محتویات دانلود : فیلم، پاورپوینت درس و 2 ام فایل مربوط به درس
جلسه پنجم:
کنترل انتگرالی ، حد بهره
در ابتدای جلسه، کنترل کننده مد لغزشی برای سیستم های مرتبه n طراحی شده است تا اگر سیستم شما مثلا دارای درجه نسبی ده بود دیگه از اول تا آخر طراحی رو انجام ندید و یا اینکه اگه میخواید طراحی رو انجام بدید بدونید میخواید به چه چیزی برسید. در ادامه به بحث در مورد کنترل انتگرالی و حد بهره پرداخته شده است. توی کتاب دلیل استفاده از کنترل انتگرالی و اینکه چرا باید سطح لغزش در ابتدا صفر باشد چیزی نگفته. از طرفی مثال هم حل نشده است. ما در این آموزش هم کاربرد کنترل انتگرالی رو گفتیم و هم یک مثال رو در نرم افزار متلب شبیه سازی کردیم. پس از اون، به نقطه اوج طراحی مد لغزشی یعنی برای سیستم هایی که به فرم x^(n)=f(x)+g(x)u هستند پرداخته شده است. نحوه اثبات در کتاب خیلی گنگه. این اثبات با تمام جزئیات از ابتدا تا انتها ذکر شده است.
مدت زمان آموزش: 66 دقیقه
محتویات دانلود : فیلم، پاورپوینت درس و ام فایل مربوط به درس
جلسه ششم:
چترینگ و راههای حذف آن (1)
در ابتدا به طراحی یک مثال برای سیستمی که بهره داشته باشه پرداخته شده است. سپس وارد موضوع چترینگ شدیم. کاربردهای چترینگ، نحوه حذف چترینگ در حالت کلی، دسته بندی که برای حذف چترینگ برای حالت های مختلف میتوان انجام داد و شبیه سازی یک مثال برای حالتی که لایه مرزی ثابت باشد موضوعاتیست که در این جلسه کار شده است. برای حذف چترینگ دو دسته بندی کلی انجام شده است یکی حذف چترینگ برای سیستم هایی که باید در آنها لایه مرزی ثابت باشد و دیگری حذف چترینگ برای سیستم هایی که در آنها لایه مرزی متغیر بهتر از لایه مرزی ثابت جواب می دهد. در این جلسه به دسته بندی اول پرداخته شده است.ضمنا مثالی که در این جلسه شبیه سازی شده است مثال7-2 کتاب است.
مدت زمان آموزش: 53 دقیقه
محتویات دانلود : فیلم، پاورپوینت درس و ام فایل مربوط به درس
جلسه هفتم:
چترینگ و راههای حذف آن (2)
در این جلسه به راه حل جذف چترینگ با استفاده از لایه مرزی متغیر پرداخته شده است. این روش برای سیستم هایی که ضریب ورودی کنترلی در آنها یک هست و نیست بررسی شده است و با ذکر مثال و شبیه سازی آن در نرم افزار متلب به صورت مفصل بحث شده است. حذف چترینگ با استفاده از لایه مرزی متغیر با زمان برای سیستم های خاصی هست. پیشنهاد می شود در صورتیکه فقط می خواید این جلسه رو خریداری بفرمایید جلسه قبل رو هم تهیه کنید چون ممکنه برای سیستم شما استفاده از این روش موضوعیت نداشته باشد.
مدت زمان آموزش: 55 دقیقه
محتویات دانلود : فیلم، پاورپوینت درس و ام فایل مربوط به درس
جلسه هشتم:
طراحی مد لغزشی برای یک سیستم چند ورودی – چند خروجی
یک مثال جامع که تمامی مباحث قبل رو بتونه پوشش بده رو طراحی کردم. مد لغزشی با در نظر گرفتن تمامی جوانب برای این سیستم طراحی شده است. در این مثال، یک سیستم دو ورودی و دو خروجی که چهار متغیر حالت دارد در نظر گرفته شده است. محدودیت های لامبدا نیز در صورت سوال مطرح شده است و این موضوع در ابتدای جلسه بحث شده است که چطور می توان محدودیت های مختلف را بر روی پارامتر لامبدا اعمال کرد.توجه بفرمایید این جلسه آخرین جلسه از مجموعه آموزش های مد لغزشی بر اساس کتاب اسلوتین بود. در ادامه سعی دارم نحوه تلفیق این روش با روش های دیگر و انواع دیگر مد لغزشی رو برای شما آماده کنم.
مدت زمان آموزش: 54 دقیقه
محتویات دانلود : فیلم، پاورپوینت درس
جلسه نهم:
در اين جلسه، يک واسط گرافيکي در متلب (gui) توليد شده که با استفاده از آن به طور اتوماتیک مي توانید يک کنترل کننده مد لغزشی (Sliding Mode) براي يک سيستم طراحي کنید. در واقع چکیده مباحث تدریس شده به صورت یک پنل تصویری در این جلسه آمده است. مخصوصاً برای دوستانی که فقط خروجی کار برای آنها مهم است، این واسط گرافيکي می تواند بسیار مفید باشد. این جلسه توسط آقای نورمحمدی فارغ التحصیل ارشد شریف تدریس شده است
برای خرید جلسه 9 به صورت جداگانه می توانید با کلیک بر روی دکمه خرید زیر این جلسه را نیز به سبد خریدتان اضافه کنید
جلسه 9 : طراحی مد لغزشی با استفاده از gui
|
۱۶۰,۰۰۰ تومان قیمت اصلی: ۱۶۰,۰۰۰ تومان بود.۱۱۷,۶۰۰ تومانقیمت فعلی: ۱۱۷,۶۰۰ تومان.Add to cart
|
مطالعه بیشتر
 مرجع مهندسی كنترل | دانش با کیفیت در مرز علم
مرجع مهندسی كنترل | دانش با کیفیت در مرز علم





جواد
من فایل جلسه 5 رو دانلود کردم. موقع extract کردن بخش های اول و چهارم و پنجم ارور می دادند. و فایل mp4 اصلا ایجاد نمی شد. دوباره با 7zip امتحان کردم فایل mp4 باز شد ولی در هنگام اجرا همون 30 ثانیه اول خارج می شه.
مدیر سایتادمین سایت ( مالک تایید شده )
@جواد,
من الان همون جلسه پنجم رو اکسترکت کردم و مشکلی پیش نیومد. شما پنج پارت رو توی یک فولدر مجزا کپی کنید و اکسترکت هیر رو بزنید.
جواد
سلام.
ببخشید، فایل mp4 جلسه 5ام فکر کنم مشکل داره. یکهو وسط نمایش فایل از آن خارج می شود. چطور باید به لینک سالم اون دسترسی پیدا کرد؟
مدیر سایتادمین سایت ( مالک تایید شده )
@جواد,
سلام
من الان از ابتدا تا انتهاشو سریع نگاه کردم. مشکلی نداشت.
منظورتون از اینکه یکهو وسط نمایش فایل از آن خارج میشود چیه؟
دقیقه چند مشکل داره؟
جواد
سلام.
در تعیین تابع سطح سوئیچینگ S صحبت از ضریب لامبدا شد. و قرار شد در مورد نحوه نعیین اون در ادامه توضیحاتی داده بشه. می خواستم بپرسم دقیقاً در کدوم جلسه این توضیح آورده شده.
ممنون
مدیر سایتادمین سایت ( مالک تایید شده )
@جواد,
سلام
بله. توضیحات در جلسه هشتم ارائه شده.ممنون
مهری
سلام و خستهنباشید.
هزینه آموزشها خیلی بالاست، حتی با اعمال تخفیف ۳۰ درصد! اگر امکانش هست لطفا برای دوستان دانشجوتون تخفیف ۵۰ درصدی در نظر بگیرید تا هم من وهم خیلی های دیگراستطاعت خریداش را پیدا کنیم.
جای بحث حذف پدیده چترینگ با کمک فازی خالی هست. و همچنین بحث کنترلکننده ترکیبی فازی-لغزشی-تطبیقی.
دوستی میگفت در صورت استفاده از روش فازی باید کنترل تطبیقی نیز پیاده سازی شوذ زیرا تطبیقی بودن اثباتی بر کنترلکننده فازی شما نیز هست. نمیدانم این حرف صحیح است یا نه. شما که متخصص این حوزه هستید، نظرتون چیست. در صورت تایدد یا رد میشود بیشتر توضیح دهید.
ممنون از لطف و توجه شما.
پیروز باشید
مدیر سایتادمین سایت ( مالک تایید شده )
@مهری,
سلام
اول از همه از نظری که دادید تشکر می کنم.
باور بفرمایید من تا پیش از این همین آموزش ها رو ساعتی هشتاد هزارتومان تدریس می کردم. اما چون دیدم بارها و بارها باید تدریس کنم تصمیم گرفتم با قیمت بسیار پایینتر یعنی ساعتی ده هزاتومان ضبط کنم و روی سایت قرار بدم. با این حال بعضی اوقات سی درصد هم تخفیف بهشون اضافه میشه. یعنی کمتر از ده درصد اون پولهایی که قبل می گرفتم. با همه این اوصاف شما بفرمایید چقدر تخفیف می خواید تا براتون در نظر بگیرم.
در مورد فازی-مدلغزشی باید عرض کنم که من این ترکیب رو انجام دادم و مقاله هم کردم. و توی برنامم هم هست که بعد از این تدریس روی سایت قرار بدم احتمالا توی دو روز آینده اینکار محقق میشه. فعلا میخوام در مورد خود مد لغزشی و انواع اون بحث کنم مثل second order sliding mode ، مثل Terminal sliding mode و … بعد از اتمام اینها سراغ تلفیق مد لغزشی با بقیه روش ها مثل فازی و احتمالا تطبیقی (که یکی از موضوعات پایان نامه دکتری خودم هست) خواهم آمد.
در مورد نظر دوستتون باید عرض کنم (با کمال احترام) ایشون اشتباه می کنند چون ضرورتی نداره که همزمان از تطبیقی و فازی استفاده بشه.و میشه هر کدوم رو به صورت جداگانه و یا با هم استفاده کرد
مهری
@مدیر سایت,
ممنون بابت پاسخ سریع شما.
منتظر آموزشهای بیشتر توی این حوزه هستم و امیدوارم این مبحث را کامل کنید.
در مورد تخفیف من اصلا راضی نیستم شما ضرر کنید، ولی انشاالله اگر زمانی این امکان فراهم شد که بتونم با تخفیف ۵۰ درصد آموزشها را خریداری کنم، حتما اقدام میکنم. البته میدانم ارزش آموزشهای شما دهها برابر بیش از اینها هست.
خیلی ممنون بابت لطف و مهربانی شما.
مدیر سایتادمین سایت ( مالک تایید شده )
@مهری,
خواهش می کنم. باز هم به سایت ما سر بزنید.
رامین
باتشکر از شما..بنظر من این آموزشها را بصورت سی دی یا دیویدی درآورده وپست کنید اینجوری هم دانلودش طول میکشه وهزینه بر خواهد شد…شما لطف کنید تمام جلسات را بصورت یکجا در dvd برای دوستان ارسال بفرمایید
مدیر سایتادمین سایت ( مالک تایید شده )
@رامین,
سلام
ممنون از نظر شما.
چشم در اسرع وقت این کارو خواهم کرد. اما سعی کردم حجم فیلم ها از هفتاد مگابایت فراتر نره. با این حال اینکارو توی هفته های آینده حتما خواهیم کرد
بازم ممنونم از حسن نظر شما
یاسر ( مالک تایید شده )
خوشمان آمد 🙂
مدیر سایتادمین سایت ( مالک تایید شده )
@یاسر,
لطف دارید
mohsen khashei
سلام
من فیلم ها رو خریدم و تا اینجا 3 قسمت رو دیدم. و می تونم بگم برای یاد گرفتن مود لغزشی عالی هستن.و می تونن نکات طراحی و مفهومی رو به خوبی منتقل کنند.
به نطرم بهتره یه مثال برای یه سیستم mimo که فرم کانونیکال نباشه هم حل بشه و شبیه سازی بشه تا بحث تکمیل بشه.
با تشکر
مدیر سایتادمین سایت ( مالک تایید شده )
@mohsen khashei,
سلام
یک دنیا ممنون. لطف کردید نظر دادید.
بله حتما اینکارو خواهیم کرد. طراحی برای سیستم های چند متغیره رو در انتهای کار و بعد از مبحث چترینگ خواهم گفت.
خیلی ممنون از نظری که دادید
جواد
سلام.
می خواستم بپرسم فیلم های آموزشی در قالب لینک دانلود یا بصورت CD های ارسالی بعد عملیات خرید تحویل داده خواهد شد. ضمناً جلسه 5ام اموزش مذ لغزشی براساس کتاب اسلوتین قابل انتخای نیست(طراحی سیستم های مرتبه n)……
مدیر سایتادمین سایت ( مالک تایید شده )
@جواد,
سلام
ممنون از نظری که دادید.
فعلا فقط در قالب ایمیل هستش. به محض اینکه خریداری بکنید ایمیلی حاوی لینک های دانلود به ایمیل شما فرستاده خواهد شد.
جلسه پنجم رو آماده کردم اما از صبح امروز تا همین الان اینترنت کل شهر ما قطع بود!!!
حداکثر تا یک ساعت دیگه جلسه پنجم هم روی سایت قرار خواهد گرفت.
از نظری که دادید بی نهایت سپاسگزارم.
عاجزانه خواهش می کنم بعد از دیدن فیلم ها نظر خودتون رو در موردشون توی همین قسمت بفرمایید
milad
فوق العادست بچه ها. کارو جلو ببرید. چقدر خوشحالم . سال ها منتظر این آموزش های مدلغزشی بودم. بزودی همشو میخرم. روش های ترکیبی فازی اسلایدینگ مود و تکاملی اسلایدینگ مود هم خیلی طرفدار دارن.( پولتون از پول اساتید دانشگاه من که فیزیک دبیرستان رو بلد نیستن ولی پروفسور هستن خیلی حلال تره.) موفق باشید.
مدیر سایتادمین سایت ( مالک تایید شده )
@milad,
سلام میلاد خان
فقط میخوایم کاری کنیم که تمام بازارها توی مهندسی برق کنترل جمع بشه.
و اینکه استادهای … رو مجبور کنیم سطح سوادشون رو بالا ببرن.
یک دنیا ممنون از نظرتون. خیلی انگیزه دادین. خیلی ازتون ممنونم. سپاس
زینب
سلام
فوق العادست. هیچ جای ایران اینطوری تدریس نمی کنن. عالیییییییییییی
مدیر سایتادمین سایت ( مالک تایید شده )
سلام. ممنونم از حسن نظر شما