آموزش مد لغزشی طبق کتاب اسلوتین
در این پست فیلم آموزش مد لغزشی طبق کتاب اسلوتین قرار داده میشود. کتاب اسلوتین رو اگه خونده باشید متوجه خواهید شد که بسیاری از مطالب این فصل گنگ هستند و نیاز به توضیحات بیشتر دارن. ضمن اینکه به نظر من بعضی از مطالب این کتاب بعد از اینکه فصل به پایان رسید باید باز هم در موردشون بحث بشه اما توی کتاب این امکان وجود نداره . از طرفی مثال هایی در این کتاب وجود داره که اگه با روند شبیه سازی اون ها هم آشنا بشیم در یادگیری این روش جذاب بسیار موثره. من مد لغزشی رو بارها و بارها بر روی سیستم های مختلف شبیه سازی کردم و مقالات زیادی در این زمینه کار کردم.
چیزی که من تضمین میدم اینه که بعد از این دوره آموزشی، به نتایج زیر خواهید رسید:
مد لغزشی رو به طور کامل و فراتر از مطالب کتاب درک خواهید کرد
با نحوه شبیه سازی مثال ها و بحث روی آنها کاملا آشنا خواهید شد
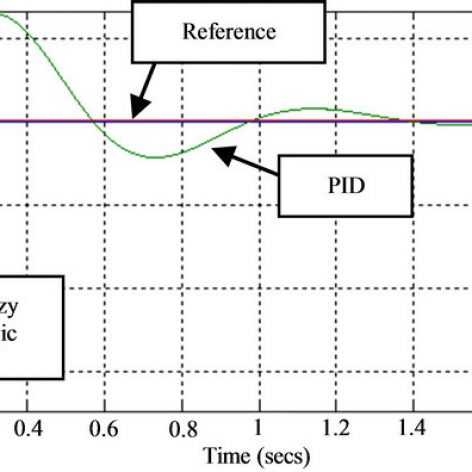
نحوه تلفیق این روش با روش هایی مثل فازی، ژنتیک و … رو خواهید آموخت (مد لغزشی فازی در همین سایت قرار داده شده است برای دانلود این فیلم آموزشی کلیک بفرمایید)
پیاده سازی این روش بر روی سیستم های غیرخطی پیچیده و شبیه سازی آنها رو یاد خواهید گرفت.
میتونید برای سیستم خودتون این شبیه سازی ها رو انجام بدید
مقالات مختلف رو که در زمینه مد لغزشی هستن میتونید براحتی درک کنید.
تفاوت این آموزش با آموزش دیگری تحت عنوان “آموزش مد لغزشی از طراحی تا شبیه سازی“ که در سایت قرار داده شده در این هست که آموزشی که در این پست قرار داره برای افرادیه که میخوان با عمق بیشتری مد لغزشی رو یاد بگیرن و اون آموزش برای کسیه که اطلاعات بسیار ناچیزی از مد لغزشی داره و فقط میخواد روی یه سیستم ساده یک مد لغزشی ساده رو پیاده کنه. اما در اینجا هم با مباحث بیشتری آشنا خواهید شد و هم مطالب با عمق بیشتری ذکر خواهند شد. همچنین یک “جزوه کاربردی مد لغزشی“ نیز در این سایت قرار داده شده است که همونطور که از اسمش معلومه فقط حالت کاربردی داره.
جلسه اول:
مقدمات و تبدیل مسئله مرتبه n به مسئله مرتبه یک
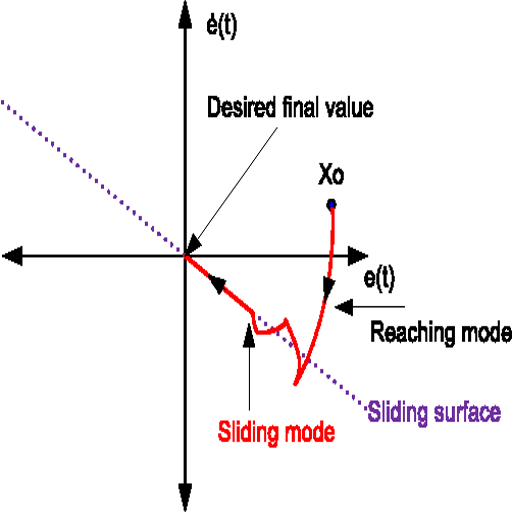
در این جلسه در مورد صورت مسئله مد لغزشی، انواع نامعینی، سطوح لغزشی و از همه مهمتر تبدیل مسئله مرتبه ان به مسئله مرتبه یک در مد لغزشی پرداخته شده است. در ادامه کلا در ارتباط با اینکه چطور میتوان یک مسئله ردیابی مرتبه ان رو به یک مسئله پایدارسازی از مرتبه یک (سطح سوئیچینگ) تبدیل کرد بحث کرد.
مدت زمان آموزش: 67 دقیقه
محتویات دانلود : فیلم، پاورپوینت درس
جلسه دوم:
شرط لغزشی ، فیلیپف دینامیک معادل
مبحث ناتمام جلسه قبل در این جلسه به اتمام میرسد. سپس در مورد شرط لغزش به طول مفصل بحث میشود همچنین در ادامه پدیده چترینگ توضیح داده شده است و در نهایت به توضیح فیلیپف و دینامیک معادل پرداخته شده است. دقت کنید این مطلب در کتاب اصلا بخوبی تفسیر داده نشده است.
مدت زمان آموزش: 55 دقیقه
محتویات دانلود : فیلم، پاورپوینت درس
جلسه سوم:
نحوه طراحی و شبیه سازی مد لغزشی به صورت گام به گام
در این جلسه ابتدا یک الگوریتم برای طراحی مد لغزشی ارائه شده است. این الگوریتم به صورت واضح بیان شده است و به صورت مفصل در مورد آن بحث شده است. مباحثی از قبیل نحوه انتخاب سطح لغزش، چرا سطح لغزش به فرمی که در کتاب است در نظر گرفته می شود؟ چرا در همه مقالات به این فرم نیست و ….. و در ادامه با یک مثال تک ورودی و تک خروجی ابتدا طراحی به طور کامل و براساس الگوریتمی که در ابتدای جلسه گفته شد انجام میشود و سپس این مثال در نرم افزار MATLAB شبیه سازی شده است. و در پایان، به بحث در مورد پارامتر های طراحی در این نرم افزار پرداخته شده است.
مدت زمان آموزش: 55 دقیقه
محتویات دانلود : فیلم، پاورپوینت درس و ام فایل مربوط به درس
جلسه چهارم:
طراحی و شبه سازی مد لغزشی برای سیستم های مرتبه دو و سه
در این جلسه طراحی کنترل کننده مد لغزشی و شبیه سازی آن در نرم افزار MATLAB برای دو سیستم مرتبه دو و سه انجام شده است. یکی از بحث های مهم طراحی مد لغزشی یعنی تبدیل هر سیستم غیرخطی به سیستم مرتبه دوم استاندارد به طور مفصل بحث شده است. همچنین مباحث تکمیلی در مورد تعریف سطح لغزش در مثال مربوط به سیستم مرتبه سه ذکر شذه است.
مدت زمان آموزش: 66 دقیقه
محتویات دانلود : فیلم، پاورپوینت درس و 2 ام فایل مربوط به درس
جلسه پنجم:
کنترل انتگرالی ، حد بهره
در ابتدای جلسه، کنترل کننده مد لغزشی برای سیستم های مرتبه n طراحی شده است تا اگر سیستم شما مثلا دارای درجه نسبی ده بود دیگه از اول تا آخر طراحی رو انجام ندید و یا اینکه اگه میخواید طراحی رو انجام بدید بدونید میخواید به چه چیزی برسید. در ادامه به بحث در مورد کنترل انتگرالی و حد بهره پرداخته شده است. توی کتاب دلیل استفاده از کنترل انتگرالی و اینکه چرا باید سطح لغزش در ابتدا صفر باشد چیزی نگفته. از طرفی مثال هم حل نشده است. ما در این آموزش هم کاربرد کنترل انتگرالی رو گفتیم و هم یک مثال رو در نرم افزار متلب شبیه سازی کردیم. پس از اون، به نقطه اوج طراحی مد لغزشی یعنی برای سیستم هایی که به فرم x^(n)=f(x)+g(x)u هستند پرداخته شده است. نحوه اثبات در کتاب خیلی گنگه. این اثبات با تمام جزئیات از ابتدا تا انتها ذکر شده است.
مدت زمان آموزش: 66 دقیقه
محتویات دانلود : فیلم، پاورپوینت درس و ام فایل مربوط به درس
جلسه ششم:
چترینگ و راههای حذف آن (1)
در ابتدا به طراحی یک مثال برای سیستمی که بهره داشته باشه پرداخته شده است. سپس وارد موضوع چترینگ شدیم. کاربردهای چترینگ، نحوه حذف چترینگ در حالت کلی، دسته بندی که برای حذف چترینگ برای حالت های مختلف میتوان انجام داد و شبیه سازی یک مثال برای حالتی که لایه مرزی ثابت باشد موضوعاتیست که در این جلسه کار شده است. برای حذف چترینگ دو دسته بندی کلی انجام شده است یکی حذف چترینگ برای سیستم هایی که باید در آنها لایه مرزی ثابت باشد و دیگری حذف چترینگ برای سیستم هایی که در آنها لایه مرزی متغیر بهتر از لایه مرزی ثابت جواب می دهد. در این جلسه به دسته بندی اول پرداخته شده است.ضمنا مثالی که در این جلسه شبیه سازی شده است مثال7-2 کتاب است.
مدت زمان آموزش: 53 دقیقه
محتویات دانلود : فیلم، پاورپوینت درس و ام فایل مربوط به درس
جلسه هفتم:
چترینگ و راههای حذف آن (2)
در این جلسه به راه حل جذف چترینگ با استفاده از لایه مرزی متغیر پرداخته شده است. این روش برای سیستم هایی که ضریب ورودی کنترلی در آنها یک هست و نیست بررسی شده است و با ذکر مثال و شبیه سازی آن در نرم افزار متلب به صورت مفصل بحث شده است. حذف چترینگ با استفاده از لایه مرزی متغیر با زمان برای سیستم های خاصی هست. پیشنهاد می شود در صورتیکه فقط می خواید این جلسه رو خریداری بفرمایید جلسه قبل رو هم تهیه کنید چون ممکنه برای سیستم شما استفاده از این روش موضوعیت نداشته باشد.
مدت زمان آموزش: 55 دقیقه
محتویات دانلود : فیلم، پاورپوینت درس و ام فایل مربوط به درس
جلسه هشتم:
طراحی مد لغزشی برای یک سیستم چند ورودی – چند خروجی
یک مثال جامع که تمامی مباحث قبل رو بتونه پوشش بده رو طراحی کردم. مد لغزشی با در نظر گرفتن تمامی جوانب برای این سیستم طراحی شده است. در این مثال، یک سیستم دو ورودی و دو خروجی که چهار متغیر حالت دارد در نظر گرفته شده است. محدودیت های لامبدا نیز در صورت سوال مطرح شده است و این موضوع در ابتدای جلسه بحث شده است که چطور می توان محدودیت های مختلف را بر روی پارامتر لامبدا اعمال کرد.توجه بفرمایید این جلسه آخرین جلسه از مجموعه آموزش های مد لغزشی بر اساس کتاب اسلوتین بود. در ادامه سعی دارم نحوه تلفیق این روش با روش های دیگر و انواع دیگر مد لغزشی رو برای شما آماده کنم.
مدت زمان آموزش: 54 دقیقه
محتویات دانلود : فیلم، پاورپوینت درس
جلسه نهم:
در اين جلسه، يک واسط گرافيکي در متلب (gui) توليد شده که با استفاده از آن به طور اتوماتیک مي توانید يک کنترل کننده مد لغزشی (Sliding Mode) براي يک سيستم طراحي کنید. در واقع چکیده مباحث تدریس شده به صورت یک پنل تصویری در این جلسه آمده است. مخصوصاً برای دوستانی که فقط خروجی کار برای آنها مهم است، این واسط گرافيکي می تواند بسیار مفید باشد. این جلسه توسط آقای نورمحمدی فارغ التحصیل ارشد شریف تدریس شده است
برای خرید جلسه 9 به صورت جداگانه می توانید با کلیک بر روی دکمه خرید زیر این جلسه را نیز به سبد خریدتان اضافه کنید
جلسه 9 : طراحی مد لغزشی با استفاده از gui
|
۲۴۰,۰۰۰ تومان قیمت اصلی: ۲۴۰,۰۰۰ تومان بود.۱۷۶,۴۰۰ تومانقیمت فعلی: ۱۷۶,۴۰۰ تومان.Add to cart
|
مطالعه بیشتر
 مرجع مهندسی كنترل | دانش با کیفیت در مرز علم
مرجع مهندسی كنترل | دانش با کیفیت در مرز علم





احمد
سلام ميخوام فايل رو خريداري كنم ميتوانيد شماره اي را براي پيگيري در اختيارم بگذاريد؟
مدیر سایتادمین سایت ( مالک تایید شده )
@احمد,
سلام
09162963870
درود
امیر
باسلام
من فیلم های آموزشی کنترل غیرخطی رو تهیه کردم ولی دو سوال برام پیش اومد:
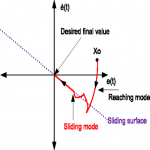
1) طبق چه استدلالی فاصله نقطه خارج از صفحه s تا صفحه s برابر قدر مطلق s است؟
2) برای ترسیم صفحه فازی در محورهای مختصات چرا از ~x استفاده نشده و از x استفاده شده در صورتیکه صفحه s برحسب ~x تعریف شده است.
باسپاس
مدیر سایتادمین سایت ( مالک تایید شده )
@امیر,
سلام و درود
1) البته روابطش رو توی نت سرچ کنید کلی مطلب هست . ولی برای درک بهتر شما میدونید که فاصله یک نقطه از مبدا میشه در واقع اندازه اون نقطه . اینجا فاصله از سطح سوئیچینگ مثل فاصله یک نقطه از مبدا هستش. چرا؟ به این خاطر که سطح لغزش در واقع همون s=0 هستش و فاصله از این خط برابر با s است بنابراین یه طورایی میشه مثل همون فاصله یک نقطه از مبدا در نظر گرفت.
2) احتمالا اشتباه تایپی بود. از شما به خاطر تیز بینیتون تشکر میکنم. ولی حتما میدونید در اصل قضیه تفاوتی بوجود نمیاره
درود
مهدی
سلام دکتر
تشکر بابت جوابگویی و راهنمایی شما، مشکلم برطرف شد.
سپاس
roya khalili
سلام
من تمام فایلها رو خریدم جلسه چهارم باز نمیشه لطفا راهنمایی بفرمایید.
البته هر جلسه هم بصورت تکراری در 4 یا 5 قسمت تکرار شده!!!!!
مدیر سایتادمین سایت ( مالک تایید شده )
سلام
جلسه چهارم رو جداگانه در یک پوشه بریزید. اسم فایلها رو یکسان کنید. یکی از فایلها با آندرلاین هستش ولی بقیه نیستن.
درود
مهدی نیک پیام
سلام دکتر
تمام فایلا رو دانلود کردم ولی هیچ کدوم باز نشد وخراب است و نمیتونم فیلم ها رو ببینم.
لطفا راهنمایی کنین. با تشکر
مدیر سایتادمین سایت ( مالک تایید شده )
@مهدی نیک پیام,
سلام
پاسخ به صورت تلفنی داده شد.
درود
siamak
حق با شما بود مشکل با تعویض x بجای t حل شد .البته شما تو فیلم ها از همون x استفاده کردید.
چالب اینجاست که ما اگه بخواییم در تکنیک اویلر یا RK4 سیستم (معادله دیفرانسیل ) رو با فانکشن تعریف کنیم باید ورودی مستقیم جای گزاری کنیم و بعد انتگرال بگیریم چون اگه مثلا ورودی u تعریف کنیم و بیرون فانکشن u رو جدا تعریف کینم جوابا با هم خیلی متفاوته !
بطور مثال عرض میکنم :
F=@(x,t) x^2+u;
u=2*x^3
[x,t]=od45(F,t,initial)
با اینجوری نوشتن
F=@(x,t) x^2+2*x^3;
[x,t]=od45(F,t,initial)
خیلی نتایج متفاوتی میده ! در صورتی که قاعدتا همه چیز رعایت شده .منظورم اینه که حالا یا از
ode45,15………
یا از Rk4
یا اویلر
اگه معادلمون رو تو فانکشن
تعریف کنیم میبایستی ورودی رو بعد طراحی مستقیم جای گزاری کنیم
مرسی مهندس
مدیر سایتادمین سایت ( مالک تایید شده )
@siamak,
سلام مجدد
به خاطر همینه که منم خیلی از این دستورات آماده متلب استفاده نمیکنم. تا جایی که میشه خودتون کد بنویسید اینطوری هم برنامه سریعتر خواهد شد و هم اینکه اگه خواستید جایی از برنامه رو تغییر بدید میتونید اینکارو بکنید ولی وقتی از دستورات آماده استفاده میکنید وسطشو نمیتونید تغییر بدید
درود
siamak
درود بر شما جناب مهندس به نظرم انتگرال گیرتون مشکل داره توضیحات و فایل پیوستی تو تلگرام فرستادم ملاحضه بفرمایید
مدیر سایتادمین سایت ( مالک تایید شده )
@siamak,
سلام و درود
ممنون که با دقت فیلم ها رو ملاحظه میکنید. در مورد اسمش باید عرض کنم حق با شماست اما چون بسط تیلور رو تقریبا همه میدونن اسمشو اینطوری گذشتم!
اما در مورد برنامه فکر کنم توی برنامه ها اگه به جای ایکس ، تی بذارید همه چی درست میشه. و احساس میکنم منظور شما از sinx ، sint بود.
در مورد اینکه چترینگ حذف میشه این غیرممکنه چون با هر روش عددی هم که حل کنید خود مد لغزشی چترینگ در ذاتش هست شما باید کمی زوم کنید. من هم قبلا هم با این روش به اصطلاح اویلر و هم رانگ کوتای مرتبه چهار حل کردم جفتش چترینگ داره.
درود
siamak
@مدیر سایت, مرسی از پاسختان
نه روش انتگرال گیر شمارا برداشتم در قالب یه ام فابل به اسم your method و یه تبع سینوس بهش دادم طبیعتا باید شکلی که رسم میکنه کسینوس باشه دیگه؟؟؟؟ و همون تابع رو با سه تا ام فایل دیگه که یکی شامل رانگ گوتاه مرتبه چهار و یکی دیگه اویلر و یدونه هم ODE45 خود متلب ) با این ستا که انتگرال میگیرم درست حل میکنه و سینوس انتگرال میگیره ازش و طبیعتا شکل کسیونوس رسم میکنه !!!! ولی اون انتگرال گیری که شما ازش تو فیلم هاتون استفاده کردید به تنهایی خودش مشکل داره ! حتی فایل هاشم خدمتتون بطور مجزا فرستادم که مقایسه کنید !
امیر حسین
سلام
تو مثال هاتون تو متلب مسئله تون مسیر مطلوبش مشتق نداشت
حالا اگه من مشتق مسیر رو هم خواسته باشم بیارم چه جوری تو متلب نوشته میشه؟به عبارتی مشق گرفتن از مسیر مطلوب چه جوریه؟
مدیر سایتادمین سایت ( مالک تایید شده )
@امیر حسین,
سلام
مسیر مطلوبتون چیه؟ هر چی که باشه میتونید دستی مشتق بگیرید و این رو جایگذاری کنید. اتفاقا خودم هم اینکارو کردم. با دقت بیشتری فیلمها رو ببینید.
درود
حامد
سلام. من همه فیلم ها را به دقت دیدم و برای اینکه بعدا بتوانم به فیلم مربوطه مراجعه کنم نوت برداری کرد. این مجموعه عالی است و آدم را به زور شیرفهم میکنه. برای کسانی که اسلایدینگ مود را تخصصی میخواهند کار کنند یک توصیه دارم. دو مقاله زیر را مطالعه کنید:
– Design of Generalized Terminal Sliding Mode Control for Second-Order Systems
– Comments on the paper: Robust controllers design with finite time convergence for rigid spacecraft attitude tracking control
مقاله اول در سال 2011 یک اسلایدینگ سرفیس یا سطح لغزش جدید را معرفی میکنه که از اون به بعد خیلی از محققین این نوع سطح را در نظر میگیرند. البته این طور نبوده که قبلش این سطح استفاده نشده باشه اما اینجا چند سطح مشابه را خیلی قشنگ معرفی کرده و بعد هم با تابع لیاپانوف، پایداری همه را اثبات کرده است.
قدری پیچیده تر هست ولی باسخ های بهتری میدهد. به عنوان مثال توی همون سال مقاله دوم از این سطح برای کنترل وضعیت ماهواره استفاده میکنه و بسیاری دیگر مقالات این دو تا را به عنوان رفرنس خود برای انتخاب سطح لغزش معرفی کردند.
از مدرسین و مدیر سایت متشکرم، خسته نباشید
مدیر سایتادمین سایت ( مالک تایید شده )
@حامد,
سلام
ممنون از نظرتون
درود
alireza
سلام.
آموزش خوب بود
مثال های 7.1 و 7.4 که مربوط به B بتا مخالف یک هست رو خوب بود حداقل فایل متلبشو قرار میدادین تا بتونیم بیشتر متوجه شیم در ادامه اگه این کار رو بکنید خیلی خوب میشه.
مدیر سایتادمین سایت ( مالک تایید شده )
@alireza,
سلام
نظر لطف شماست
خودم که فکر کردم خیلی طولانی شد. ولی اگه میدونستم واقعا نیازه حتما این مثال رو هم حل میکردم
درود