آموزش مد لغزشی طبق کتاب اسلوتین
در این پست فیلم آموزش مد لغزشی طبق کتاب اسلوتین قرار داده میشود. کتاب اسلوتین رو اگه خونده باشید متوجه خواهید شد که بسیاری از مطالب این فصل گنگ هستند و نیاز به توضیحات بیشتر دارن. ضمن اینکه به نظر من بعضی از مطالب این کتاب بعد از اینکه فصل به پایان رسید باید باز هم در موردشون بحث بشه اما توی کتاب این امکان وجود نداره . از طرفی مثال هایی در این کتاب وجود داره که اگه با روند شبیه سازی اون ها هم آشنا بشیم در یادگیری این روش جذاب بسیار موثره. من مد لغزشی رو بارها و بارها بر روی سیستم های مختلف شبیه سازی کردم و مقالات زیادی در این زمینه کار کردم.
چیزی که من تضمین میدم اینه که بعد از این دوره آموزشی، به نتایج زیر خواهید رسید:
مد لغزشی رو به طور کامل و فراتر از مطالب کتاب درک خواهید کرد
با نحوه شبیه سازی مثال ها و بحث روی آنها کاملا آشنا خواهید شد
نحوه تلفیق این روش با روش هایی مثل فازی، ژنتیک و … رو خواهید آموخت (مد لغزشی فازی در همین سایت قرار داده شده است برای دانلود این فیلم آموزشی کلیک بفرمایید)
پیاده سازی این روش بر روی سیستم های غیرخطی پیچیده و شبیه سازی آنها رو یاد خواهید گرفت.
میتونید برای سیستم خودتون این شبیه سازی ها رو انجام بدید
مقالات مختلف رو که در زمینه مد لغزشی هستن میتونید براحتی درک کنید.
تفاوت این آموزش با آموزش دیگری تحت عنوان “آموزش مد لغزشی از طراحی تا شبیه سازی“ که در سایت قرار داده شده در این هست که آموزشی که در این پست قرار داره برای افرادیه که میخوان با عمق بیشتری مد لغزشی رو یاد بگیرن و اون آموزش برای کسیه که اطلاعات بسیار ناچیزی از مد لغزشی داره و فقط میخواد روی یه سیستم ساده یک مد لغزشی ساده رو پیاده کنه. اما در اینجا هم با مباحث بیشتری آشنا خواهید شد و هم مطالب با عمق بیشتری ذکر خواهند شد. همچنین یک “جزوه کاربردی مد لغزشی“ نیز در این سایت قرار داده شده است که همونطور که از اسمش معلومه فقط حالت کاربردی داره.
جلسه اول:
مقدمات و تبدیل مسئله مرتبه n به مسئله مرتبه یک
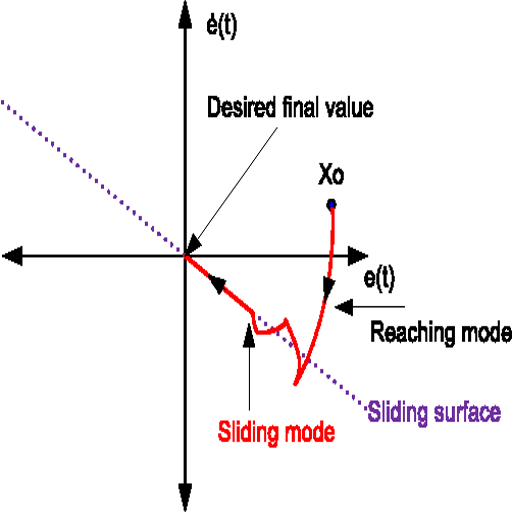
در این جلسه در مورد صورت مسئله مد لغزشی، انواع نامعینی، سطوح لغزشی و از همه مهمتر تبدیل مسئله مرتبه ان به مسئله مرتبه یک در مد لغزشی پرداخته شده است. در ادامه کلا در ارتباط با اینکه چطور میتوان یک مسئله ردیابی مرتبه ان رو به یک مسئله پایدارسازی از مرتبه یک (سطح سوئیچینگ) تبدیل کرد بحث کرد.
مدت زمان آموزش: 67 دقیقه
محتویات دانلود : فیلم، پاورپوینت درس
جلسه دوم:
شرط لغزشی ، فیلیپف دینامیک معادل
مبحث ناتمام جلسه قبل در این جلسه به اتمام میرسد. سپس در مورد شرط لغزش به طول مفصل بحث میشود همچنین در ادامه پدیده چترینگ توضیح داده شده است و در نهایت به توضیح فیلیپف و دینامیک معادل پرداخته شده است. دقت کنید این مطلب در کتاب اصلا بخوبی تفسیر داده نشده است.
مدت زمان آموزش: 55 دقیقه
محتویات دانلود : فیلم، پاورپوینت درس
جلسه سوم:
نحوه طراحی و شبیه سازی مد لغزشی به صورت گام به گام
در این جلسه ابتدا یک الگوریتم برای طراحی مد لغزشی ارائه شده است. این الگوریتم به صورت واضح بیان شده است و به صورت مفصل در مورد آن بحث شده است. مباحثی از قبیل نحوه انتخاب سطح لغزش، چرا سطح لغزش به فرمی که در کتاب است در نظر گرفته می شود؟ چرا در همه مقالات به این فرم نیست و ….. و در ادامه با یک مثال تک ورودی و تک خروجی ابتدا طراحی به طور کامل و براساس الگوریتمی که در ابتدای جلسه گفته شد انجام میشود و سپس این مثال در نرم افزار MATLAB شبیه سازی شده است. و در پایان، به بحث در مورد پارامتر های طراحی در این نرم افزار پرداخته شده است.
مدت زمان آموزش: 55 دقیقه
محتویات دانلود : فیلم، پاورپوینت درس و ام فایل مربوط به درس
جلسه چهارم:
طراحی و شبه سازی مد لغزشی برای سیستم های مرتبه دو و سه
در این جلسه طراحی کنترل کننده مد لغزشی و شبیه سازی آن در نرم افزار MATLAB برای دو سیستم مرتبه دو و سه انجام شده است. یکی از بحث های مهم طراحی مد لغزشی یعنی تبدیل هر سیستم غیرخطی به سیستم مرتبه دوم استاندارد به طور مفصل بحث شده است. همچنین مباحث تکمیلی در مورد تعریف سطح لغزش در مثال مربوط به سیستم مرتبه سه ذکر شذه است.
مدت زمان آموزش: 66 دقیقه
محتویات دانلود : فیلم، پاورپوینت درس و 2 ام فایل مربوط به درس
جلسه پنجم:
کنترل انتگرالی ، حد بهره
در ابتدای جلسه، کنترل کننده مد لغزشی برای سیستم های مرتبه n طراحی شده است تا اگر سیستم شما مثلا دارای درجه نسبی ده بود دیگه از اول تا آخر طراحی رو انجام ندید و یا اینکه اگه میخواید طراحی رو انجام بدید بدونید میخواید به چه چیزی برسید. در ادامه به بحث در مورد کنترل انتگرالی و حد بهره پرداخته شده است. توی کتاب دلیل استفاده از کنترل انتگرالی و اینکه چرا باید سطح لغزش در ابتدا صفر باشد چیزی نگفته. از طرفی مثال هم حل نشده است. ما در این آموزش هم کاربرد کنترل انتگرالی رو گفتیم و هم یک مثال رو در نرم افزار متلب شبیه سازی کردیم. پس از اون، به نقطه اوج طراحی مد لغزشی یعنی برای سیستم هایی که به فرم x^(n)=f(x)+g(x)u هستند پرداخته شده است. نحوه اثبات در کتاب خیلی گنگه. این اثبات با تمام جزئیات از ابتدا تا انتها ذکر شده است.
مدت زمان آموزش: 66 دقیقه
محتویات دانلود : فیلم، پاورپوینت درس و ام فایل مربوط به درس
جلسه ششم:
چترینگ و راههای حذف آن (1)
در ابتدا به طراحی یک مثال برای سیستمی که بهره داشته باشه پرداخته شده است. سپس وارد موضوع چترینگ شدیم. کاربردهای چترینگ، نحوه حذف چترینگ در حالت کلی، دسته بندی که برای حذف چترینگ برای حالت های مختلف میتوان انجام داد و شبیه سازی یک مثال برای حالتی که لایه مرزی ثابت باشد موضوعاتیست که در این جلسه کار شده است. برای حذف چترینگ دو دسته بندی کلی انجام شده است یکی حذف چترینگ برای سیستم هایی که باید در آنها لایه مرزی ثابت باشد و دیگری حذف چترینگ برای سیستم هایی که در آنها لایه مرزی متغیر بهتر از لایه مرزی ثابت جواب می دهد. در این جلسه به دسته بندی اول پرداخته شده است.ضمنا مثالی که در این جلسه شبیه سازی شده است مثال7-2 کتاب است.
مدت زمان آموزش: 53 دقیقه
محتویات دانلود : فیلم، پاورپوینت درس و ام فایل مربوط به درس
جلسه هفتم:
چترینگ و راههای حذف آن (2)
در این جلسه به راه حل جذف چترینگ با استفاده از لایه مرزی متغیر پرداخته شده است. این روش برای سیستم هایی که ضریب ورودی کنترلی در آنها یک هست و نیست بررسی شده است و با ذکر مثال و شبیه سازی آن در نرم افزار متلب به صورت مفصل بحث شده است. حذف چترینگ با استفاده از لایه مرزی متغیر با زمان برای سیستم های خاصی هست. پیشنهاد می شود در صورتیکه فقط می خواید این جلسه رو خریداری بفرمایید جلسه قبل رو هم تهیه کنید چون ممکنه برای سیستم شما استفاده از این روش موضوعیت نداشته باشد.
مدت زمان آموزش: 55 دقیقه
محتویات دانلود : فیلم، پاورپوینت درس و ام فایل مربوط به درس
جلسه هشتم:
طراحی مد لغزشی برای یک سیستم چند ورودی – چند خروجی
یک مثال جامع که تمامی مباحث قبل رو بتونه پوشش بده رو طراحی کردم. مد لغزشی با در نظر گرفتن تمامی جوانب برای این سیستم طراحی شده است. در این مثال، یک سیستم دو ورودی و دو خروجی که چهار متغیر حالت دارد در نظر گرفته شده است. محدودیت های لامبدا نیز در صورت سوال مطرح شده است و این موضوع در ابتدای جلسه بحث شده است که چطور می توان محدودیت های مختلف را بر روی پارامتر لامبدا اعمال کرد.توجه بفرمایید این جلسه آخرین جلسه از مجموعه آموزش های مد لغزشی بر اساس کتاب اسلوتین بود. در ادامه سعی دارم نحوه تلفیق این روش با روش های دیگر و انواع دیگر مد لغزشی رو برای شما آماده کنم.
مدت زمان آموزش: 54 دقیقه
محتویات دانلود : فیلم، پاورپوینت درس
جلسه نهم:
در اين جلسه، يک واسط گرافيکي در متلب (gui) توليد شده که با استفاده از آن به طور اتوماتیک مي توانید يک کنترل کننده مد لغزشی (Sliding Mode) براي يک سيستم طراحي کنید. در واقع چکیده مباحث تدریس شده به صورت یک پنل تصویری در این جلسه آمده است. مخصوصاً برای دوستانی که فقط خروجی کار برای آنها مهم است، این واسط گرافيکي می تواند بسیار مفید باشد. این جلسه توسط آقای نورمحمدی فارغ التحصیل ارشد شریف تدریس شده است
برای خرید جلسه 9 به صورت جداگانه می توانید با کلیک بر روی دکمه خرید زیر این جلسه را نیز به سبد خریدتان اضافه کنید
جلسه 9 : طراحی مد لغزشی با استفاده از gui
|
۲۴۰,۰۰۰ تومان قیمت اصلی: ۲۴۰,۰۰۰ تومان بود.۱۷۶,۴۰۰ تومانقیمت فعلی: ۱۷۶,۴۰۰ تومان.Add to cart
|
مطالعه بیشتر
 مرجع مهندسی كنترل | دانش با کیفیت در مرز علم
مرجع مهندسی كنترل | دانش با کیفیت در مرز علم





یزدان
با سلام و تشکر بسیار خدمت آموزش عالیتون
سوالی که داشتم این هست که با توجه به اینکه در روش مد لغزشی آموزش داده شده حالت ها به عنوان سیگنال های فیدبک استفاده میشن در صورتی که بخواییم در عمل این روش رو پیاده کنیم نویز ناشی از اندازه گیری های سنسورها را میشه بدون فیلتر کردن در این روش کاهش داد. اگر در این باره منبع یا مقاله ای موجود باشه ازتون ممنون میشم راهنماییم کنید.
با تشکر
مدیر سایتادمین سایت ( مالک تایید شده )
@یزدان,
سلام
نظر لطف شماست. مقاله خاصی توی ذهنم نیست.
وقتی شما از فیلتر کالمن در تخمین حالتهاتون استفاده میکنید خود به خود اثر نویز کاهش میکنه. به خاطر اینکه فیلتر کالمن به نوعی شبیه یک فیلتر پایین گذر عمل میکنه. حتی استفاده از فیلتر کالمن باعث کاهش شدید چترینگ در روش مد لغزشی میشه.
سپاسگزارم
یزدان
@مدیر سایت,
با تشکر فراوان از توجهتون
ولی منظور من کاهش اثر نویز بدون استفاده از فیلتر هست ، یعنی حالت ها موجودند ولی نویز هم دارند آیا در این روش راهی برای کاهش اثر نویز (مثل کاهش اثر اغتشاش) هست که کنترل کننده علاوه بر اغتشاش به نویز هم مقاوم باشه.
با تشکر
مدیر سایتادمین سایت ( مالک تایید شده )
@یزدان,
خواهش میکنم. بله مقالات زیادی در این زمینه وجود دارن. من با یک سرچ ساده این مقاله رو پیدا کردم. شما با سرچ بیشتر مقالات بهتر هم میتونید پیدا کنید
Robust Sliding Mode Control for Systems with
Noise and Unmodeled Dynamics based on
Uncertainty and Disturbance Estimation
یزدان
@مدیر سایت,
بی اندازه از شما سپاس گزارم.
احسان بادفر
با سلام
من دو روز پیش کل جلسات این مجموعه را خریداری کردم. ولی برای دانلود جلسه چهارم مشکل دارم . ممکنه یک بار دیگه برام ایمیل کنید ؟
مدیر سایتادمین سایت ( مالک تایید شده )
@احسان بادفر,
سلام
دانلود این جلسه مشکلی نداره بلکه اکسترکتش مشکل داره که توی همین قسمت نظرات توضیح دادم. یک بار دیگه هم توضیح میدم.
ببینید دوستان، اسم یکی از پارتهای جلسه چهارم با بقیه متفاوته. شما پارتهای این جلسه رو توی یک پوشه بریزید و به صورت زیر نامگذاری کنید
1
2
3
4
5
حالا دوباره اکسترکت کنید
سپاسگزارم
علی نصیری
سلام خسته نباشید ، ببخشید حجم همه جلسات روی هم چقده؟
مدیر سایتادمین سایت ( مالک تایید شده )
@علی نصیری,
سلام
فکر کنم حدودا 650 مگابایته.
هر جلسه تقریبا بین هشتاد تا صد مگابایته
مهرداد
سلام. فایل 3 مشکل داره. فایل پور پوینت اکسترکت میشه اما فایل ویدیوش ارور میده !!!! از part1 تا 4 شماره گذاری کردم درست نشد…
مدیر سایتادمین سایت ( مالک تایید شده )
@مهرداد,
@مهرداد,
سلام
جلسه سوم مشکلش اینه که همه پارتهاش به یه اسم نیستند و یکی از پارتها یک آندرلاین اضافه داره . این رو توی نظرات هم پاسخ دادم. راه حلش اینه که اسم این پارتها رو از شماره 1 تا آخر نامگذاری کنید و دوباره اکسترکت کنید
سپاس
مهرداد
اینکار رو کردم ولی درست نشد…..
مدیر سایتادمین سایت ( مالک تایید شده )
@مهرداد,
پس باید دوباره دانلود بفرمایید
مهرداد
متاسفم! ولی لینک دانلود شما منقضی شده است…..
مدیر سایتادمین سایت ( مالک تایید شده )
@مهرداد,
سلام
توی تلگرام به من پیام بدید
سپاس
09162963870
lمجید
لطفا این مقاله رو نگاه کنید.
Robust control of a spatial robot using fuzzy sliding modes
Article in Mathematical and Computer Modelling 49(1-2):114-127 · January 2009
مدیر سایتادمین سایت ( مالک تایید شده )
@lمجید,
دیدم. البته روش من متفاوت با روش این مقالست هرچند کامل نخوندم هاااا.
ضمن اینکه معادله 7 رو ببینید و هیچ اغتشاشی توی معادله در نظر نگرفته!!!
lمجید
سلام.
جایی خوندم که وقتی خطلا زیاده (منفی بزرگ)باید شیب سطح لغزش رو کم کنیم و وقتی خطا کمه (منفی کم) باید شیب سطح لغزش رو زیاد کنیم. یعنی صحبت از ربع دوم و چهارمه. دلیلش چیه ؟؟؟ آیا وقتی خطلا زیاده (منفی بزرگ) با کاهش شیب سطح لغزش فاز رسیدن کم میشه؟؟؟؟
مدیر سایتادمین سایت ( مالک تایید شده )
@lمجید,
سلام
اینو قبلا پاسخ دادم
مدیر سایتادمین سایت ( مالک تایید شده )
@lمجید,
سلام
این سوال رو قبلا پاسخ دادم . لطفا نظرات رو بخونید
yazdan
با سپاس بسیار از توجهتون
yazdan
با سلام و تشکر خدمت فیلم های عالیتون
شما در بخشی از فیلم در جلسه چهارم فرمودین که اغتشاش رو در کنار نامعینی های دیگه با هم در نظر میگیریم سوالم این هست اگه خود اغتشاش مثل دو تابع f یا b دارای کران بالا و پایین بود باید براش مقدار نامی تعریف بشه؟ اگه جواب مثبت هست با کدوم میانگین ، هندسی یا حسابی
با تشکر بسیار
مدیر سایتادمین سایت ( مالک تایید شده )
@yazdan,
سلام
بله. ببینید وقتی نامعینی به صورت جمعی باشه یا اغتشاش داشته باشیم این دو تا رو میشه با هم جمع کرد و بعنوان نامعینی جمعی بهش نگاه کرد. در این صورت شما باید از میانگین حسابی استفاده بفرمایید نه هندسی. چون میانگین هندسی برای نامعینی های ضربیه. در مورد میانگین گیری از اغتشاش و نامعینی، از تک تکشون میانگین بگیرید و بعد با هم جمع کنید 🙂
میلاد
سلام من میخوام این فیلم اموزشی رو بخرم و قیمت کلش هم 52تومان هست ولی وقتی میزنم کل هزینه میشه 127تومان چیکار کنم؟
مدیر سایتادمین سایت ( مالک تایید شده )
@میلاد,
سلام
در قسمت آخر که میخواید دکمه خرید رو بزنید و به صفحه بانک برید احتمالا محصولاتی رو انتخاب کردید. در کنار اون محصولات یک علامت ضربدر وجود داره . با زدن اون ضربدر اون محصولات رو حذف کنید.
سپاس
میلاد
@مدیر سایت, تشکر خریدم
امیر
باسلام
اگر معادله ای به فرم
xdotdot=-a*xdot-(2+a)*x-b*u
, f=-a*xdot-(2+a)*x
و اگر محدوده a مشخص باشد آنگاه با توجه به اینکه در f،
xdot ظاهر شده است چطور میتوان حدبالا و پایین f را جهت طراحی کنترلر تعیین نمود؟
متشکرم
مدیر سایتادمین سایت ( مالک تایید شده )
@امیر,
سلام
عذرخواهی می کنم ازینکه دیر پاسخ دادم
مقدار ماکزیمم a رو اگه جایگذاری بفرمایید مقدار ماکزیمم f بدست میاد و همینطور برای مینیمم و متوسطش عمل کنید.
سپاس