آموزش مد لغزشی طبق کتاب اسلوتین
در این پست فیلم آموزش مد لغزشی طبق کتاب اسلوتین قرار داده میشود. کتاب اسلوتین رو اگه خونده باشید متوجه خواهید شد که بسیاری از مطالب این فصل گنگ هستند و نیاز به توضیحات بیشتر دارن. ضمن اینکه به نظر من بعضی از مطالب این کتاب بعد از اینکه فصل به پایان رسید باید باز هم در موردشون بحث بشه اما توی کتاب این امکان وجود نداره . از طرفی مثال هایی در این کتاب وجود داره که اگه با روند شبیه سازی اون ها هم آشنا بشیم در یادگیری این روش جذاب بسیار موثره. من مد لغزشی رو بارها و بارها بر روی سیستم های مختلف شبیه سازی کردم و مقالات زیادی در این زمینه کار کردم.
چیزی که من تضمین میدم اینه که بعد از این دوره آموزشی، به نتایج زیر خواهید رسید:
مد لغزشی رو به طور کامل و فراتر از مطالب کتاب درک خواهید کرد
با نحوه شبیه سازی مثال ها و بحث روی آنها کاملا آشنا خواهید شد
نحوه تلفیق این روش با روش هایی مثل فازی، ژنتیک و … رو خواهید آموخت (مد لغزشی فازی در همین سایت قرار داده شده است برای دانلود این فیلم آموزشی کلیک بفرمایید)
پیاده سازی این روش بر روی سیستم های غیرخطی پیچیده و شبیه سازی آنها رو یاد خواهید گرفت.
میتونید برای سیستم خودتون این شبیه سازی ها رو انجام بدید
مقالات مختلف رو که در زمینه مد لغزشی هستن میتونید براحتی درک کنید.
تفاوت این آموزش با آموزش دیگری تحت عنوان “آموزش مد لغزشی از طراحی تا شبیه سازی“ که در سایت قرار داده شده در این هست که آموزشی که در این پست قرار داره برای افرادیه که میخوان با عمق بیشتری مد لغزشی رو یاد بگیرن و اون آموزش برای کسیه که اطلاعات بسیار ناچیزی از مد لغزشی داره و فقط میخواد روی یه سیستم ساده یک مد لغزشی ساده رو پیاده کنه. اما در اینجا هم با مباحث بیشتری آشنا خواهید شد و هم مطالب با عمق بیشتری ذکر خواهند شد. همچنین یک “جزوه کاربردی مد لغزشی“ نیز در این سایت قرار داده شده است که همونطور که از اسمش معلومه فقط حالت کاربردی داره.
جلسه اول:
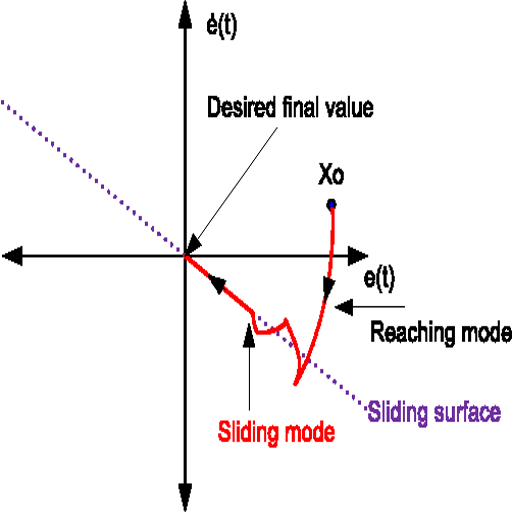
مقدمات و تبدیل مسئله مرتبه n به مسئله مرتبه یک
در این جلسه در مورد صورت مسئله مد لغزشی، انواع نامعینی، سطوح لغزشی و از همه مهمتر تبدیل مسئله مرتبه ان به مسئله مرتبه یک در مد لغزشی پرداخته شده است. در ادامه کلا در ارتباط با اینکه چطور میتوان یک مسئله ردیابی مرتبه ان رو به یک مسئله پایدارسازی از مرتبه یک (سطح سوئیچینگ) تبدیل کرد بحث کرد.
مدت زمان آموزش: 67 دقیقه
محتویات دانلود : فیلم، پاورپوینت درس
جلسه دوم:
شرط لغزشی ، فیلیپف دینامیک معادل
مبحث ناتمام جلسه قبل در این جلسه به اتمام میرسد. سپس در مورد شرط لغزش به طول مفصل بحث میشود همچنین در ادامه پدیده چترینگ توضیح داده شده است و در نهایت به توضیح فیلیپف و دینامیک معادل پرداخته شده است. دقت کنید این مطلب در کتاب اصلا بخوبی تفسیر داده نشده است.
مدت زمان آموزش: 55 دقیقه
محتویات دانلود : فیلم، پاورپوینت درس
جلسه سوم:
نحوه طراحی و شبیه سازی مد لغزشی به صورت گام به گام
در این جلسه ابتدا یک الگوریتم برای طراحی مد لغزشی ارائه شده است. این الگوریتم به صورت واضح بیان شده است و به صورت مفصل در مورد آن بحث شده است. مباحثی از قبیل نحوه انتخاب سطح لغزش، چرا سطح لغزش به فرمی که در کتاب است در نظر گرفته می شود؟ چرا در همه مقالات به این فرم نیست و ….. و در ادامه با یک مثال تک ورودی و تک خروجی ابتدا طراحی به طور کامل و براساس الگوریتمی که در ابتدای جلسه گفته شد انجام میشود و سپس این مثال در نرم افزار MATLAB شبیه سازی شده است. و در پایان، به بحث در مورد پارامتر های طراحی در این نرم افزار پرداخته شده است.
مدت زمان آموزش: 55 دقیقه
محتویات دانلود : فیلم، پاورپوینت درس و ام فایل مربوط به درس
جلسه چهارم:
طراحی و شبه سازی مد لغزشی برای سیستم های مرتبه دو و سه
در این جلسه طراحی کنترل کننده مد لغزشی و شبیه سازی آن در نرم افزار MATLAB برای دو سیستم مرتبه دو و سه انجام شده است. یکی از بحث های مهم طراحی مد لغزشی یعنی تبدیل هر سیستم غیرخطی به سیستم مرتبه دوم استاندارد به طور مفصل بحث شده است. همچنین مباحث تکمیلی در مورد تعریف سطح لغزش در مثال مربوط به سیستم مرتبه سه ذکر شذه است.
مدت زمان آموزش: 66 دقیقه
محتویات دانلود : فیلم، پاورپوینت درس و 2 ام فایل مربوط به درس
جلسه پنجم:
کنترل انتگرالی ، حد بهره
در ابتدای جلسه، کنترل کننده مد لغزشی برای سیستم های مرتبه n طراحی شده است تا اگر سیستم شما مثلا دارای درجه نسبی ده بود دیگه از اول تا آخر طراحی رو انجام ندید و یا اینکه اگه میخواید طراحی رو انجام بدید بدونید میخواید به چه چیزی برسید. در ادامه به بحث در مورد کنترل انتگرالی و حد بهره پرداخته شده است. توی کتاب دلیل استفاده از کنترل انتگرالی و اینکه چرا باید سطح لغزش در ابتدا صفر باشد چیزی نگفته. از طرفی مثال هم حل نشده است. ما در این آموزش هم کاربرد کنترل انتگرالی رو گفتیم و هم یک مثال رو در نرم افزار متلب شبیه سازی کردیم. پس از اون، به نقطه اوج طراحی مد لغزشی یعنی برای سیستم هایی که به فرم x^(n)=f(x)+g(x)u هستند پرداخته شده است. نحوه اثبات در کتاب خیلی گنگه. این اثبات با تمام جزئیات از ابتدا تا انتها ذکر شده است.
مدت زمان آموزش: 66 دقیقه
محتویات دانلود : فیلم، پاورپوینت درس و ام فایل مربوط به درس
جلسه ششم:
چترینگ و راههای حذف آن (1)
در ابتدا به طراحی یک مثال برای سیستمی که بهره داشته باشه پرداخته شده است. سپس وارد موضوع چترینگ شدیم. کاربردهای چترینگ، نحوه حذف چترینگ در حالت کلی، دسته بندی که برای حذف چترینگ برای حالت های مختلف میتوان انجام داد و شبیه سازی یک مثال برای حالتی که لایه مرزی ثابت باشد موضوعاتیست که در این جلسه کار شده است. برای حذف چترینگ دو دسته بندی کلی انجام شده است یکی حذف چترینگ برای سیستم هایی که باید در آنها لایه مرزی ثابت باشد و دیگری حذف چترینگ برای سیستم هایی که در آنها لایه مرزی متغیر بهتر از لایه مرزی ثابت جواب می دهد. در این جلسه به دسته بندی اول پرداخته شده است.ضمنا مثالی که در این جلسه شبیه سازی شده است مثال7-2 کتاب است.
مدت زمان آموزش: 53 دقیقه
محتویات دانلود : فیلم، پاورپوینت درس و ام فایل مربوط به درس
جلسه هفتم:
چترینگ و راههای حذف آن (2)
در این جلسه به راه حل جذف چترینگ با استفاده از لایه مرزی متغیر پرداخته شده است. این روش برای سیستم هایی که ضریب ورودی کنترلی در آنها یک هست و نیست بررسی شده است و با ذکر مثال و شبیه سازی آن در نرم افزار متلب به صورت مفصل بحث شده است. حذف چترینگ با استفاده از لایه مرزی متغیر با زمان برای سیستم های خاصی هست. پیشنهاد می شود در صورتیکه فقط می خواید این جلسه رو خریداری بفرمایید جلسه قبل رو هم تهیه کنید چون ممکنه برای سیستم شما استفاده از این روش موضوعیت نداشته باشد.
مدت زمان آموزش: 55 دقیقه
محتویات دانلود : فیلم، پاورپوینت درس و ام فایل مربوط به درس
جلسه هشتم:
طراحی مد لغزشی برای یک سیستم چند ورودی – چند خروجی
یک مثال جامع که تمامی مباحث قبل رو بتونه پوشش بده رو طراحی کردم. مد لغزشی با در نظر گرفتن تمامی جوانب برای این سیستم طراحی شده است. در این مثال، یک سیستم دو ورودی و دو خروجی که چهار متغیر حالت دارد در نظر گرفته شده است. محدودیت های لامبدا نیز در صورت سوال مطرح شده است و این موضوع در ابتدای جلسه بحث شده است که چطور می توان محدودیت های مختلف را بر روی پارامتر لامبدا اعمال کرد.توجه بفرمایید این جلسه آخرین جلسه از مجموعه آموزش های مد لغزشی بر اساس کتاب اسلوتین بود. در ادامه سعی دارم نحوه تلفیق این روش با روش های دیگر و انواع دیگر مد لغزشی رو برای شما آماده کنم.
مدت زمان آموزش: 54 دقیقه
محتویات دانلود : فیلم، پاورپوینت درس
جلسه نهم:
در اين جلسه، يک واسط گرافيکي در متلب (gui) توليد شده که با استفاده از آن به طور اتوماتیک مي توانید يک کنترل کننده مد لغزشی (Sliding Mode) براي يک سيستم طراحي کنید. در واقع چکیده مباحث تدریس شده به صورت یک پنل تصویری در این جلسه آمده است. مخصوصاً برای دوستانی که فقط خروجی کار برای آنها مهم است، این واسط گرافيکي می تواند بسیار مفید باشد. این جلسه توسط آقای نورمحمدی فارغ التحصیل ارشد شریف تدریس شده است
برای خرید جلسه 9 به صورت جداگانه می توانید با کلیک بر روی دکمه خرید زیر این جلسه را نیز به سبد خریدتان اضافه کنید
جلسه 9 : طراحی مد لغزشی با استفاده از gui
|
۱۶۰,۰۰۰ تومان قیمت اصلی: ۱۶۰,۰۰۰ تومان بود.۱۱۷,۶۰۰ تومانقیمت فعلی: ۱۱۷,۶۰۰ تومان.Add to cart
|
مطالعه بیشتر
 مرجع مهندسی كنترل | دانش با کیفیت در مرز علم
مرجع مهندسی كنترل | دانش با کیفیت در مرز علم





محمد
ببخشید نحوه تبدیل سیستم به شکل x^(n)= f+g*u در آموزش آمده ست.
مدیر سایتادمین سایت ( مالک تایید شده )
@محمد,
سلام
خیر ولی شما میتوانید با استفاده از تبدیل دیفئو مورفیسم اینکارو بکنید. استفاده از این تبدیل اما، کار ساده ای نیست. ضمن اینکه لزومی ندارد در همه موارد سیستم رو به فرم افاین در بیاریم.
سپاسگزارم
ابرهیم
سلام
امکان دارد شبیه سازی جلسه هشتم بطور کامل انجام دهید(در آخر فیلم)
با تشکر
مدیر سایتادمین سایت ( مالک تایید شده )
@ابرهیم,
سلام
ممنونم. و ببخشید که دیر پاسخ دادم
فعلا فرصتشو ندارم مگه اینکه هشت نفر درخواست بدن
سپاسگزارم
محمد
سلام
ایا فایل تدریس شما به درد کسایی که در حوضه کنترل کار نکردن وقصد یادگیری واجرای یک پروژه در حوضه هدایت مقاوم با مد لغزشی رو دارن به درد می خوره یا نیاز به پیش زمینه داره
مدیر سایتادمین سایت ( مالک تایید شده )
@محمد,
سلام قطعا بله
سپاسگزارم
حسین
سلام
من دقیقا نفهمیدم چرا برای بدست اوردن یو اکوال(ببخشید زبان ویندوزم مشکل داره انگلیسی خراب میزنه) وقتی اس دات را برابر صفر میزاری به جای اف، اف هت میزارین اما برای بدست اوردن کا در اس، اس اس دات خود اف را جایگذاری کردین؟؟؟
میشه توضیح بدین؟
مدیر سایتادمین سایت ( مالک تایید شده )
@حسین,
سلام
اف هت به نوعی به مفهوم یوایکویولنت ربط داره شما به جلسه ای که این مفهوم توضیح داده میشه مراجعه بفرمایید. در قسمت اول که فرمودید این یک الگوریتم برای بدست آوردن کنترل کننده هست و در قسمت دوم که باید مقدار واقعی قرار داده شود
حسین
سلام خسته نباشید
خدایی شما دکترایی با اهنگ درس میخونی؟؟؟؟؟؟؟؟؟؟؟؟؟؟؟؟؟
اصلا نمیشه تمرکز کرد. من نمیتونم!
ولی اموزش عالیه ممنون.
مدیر سایتادمین سایت ( مالک تایید شده )
@حسین,
سلام
فقط همین یک مجموعه آموزشی با موسیقی هستش بقیه بدون موسیقی هستن. ضمن اینکه این یک موسیقی آروم و با صدای کم هست و در خیلی از آموزشها ازش استفاده میشه . با این حال چشم من این آهنگو از پس زمینه حذف می کنم
ممنونم
فرزانه
با عرض سلام و خسته نباشید
من قادر به بازکردن فایلهای متلب که درون پکیج فیلمها قرار دارد، نیستم.لطفن راهنمایی بفرمایید.متلب پیغام میده که —NOT FOUND
مدیر سایتادمین سایت ( مالک تایید شده )
@فرزانه,
سلام
مشکل در مسیری بود که فایلها در آنجا کپی شدن که شامل کلمه فارسی بود. که به صورت آنلاین توضیح داده شد.
سپاسگزارم
امیر محمد
آقا عالی درس دادید فقط اون آهنگ پس زمینش منو … . من قصد دارم از باقی محصولات شما استفاده کنم فقط اگر نظر مشتری براتون مهمه اون آهنگو حذف کنید یا لااقل آهنگای مختلف بذارید.هر 5 دقیقه یه آهنگ تکراری پخش میشه.تو کل این دوره 100 بار حدودا پخش شد.اگر میخواهید صدا خارج ضبط نشه خب برید یه جای ساکت ضبط کنید. 🙁
مدیر سایتادمین سایت ( مالک تایید شده )
@امیر محمد,
سلام
بقیه فیلمها این آهنگو ندارن و داریم این آهنگ ها رو روی فیلم هایی که گذاشتیم حذف میکنیم
سپاس
فرزانه
با سلام من سری کامل فیلمهارو امروز خریداری کردم
جلسه اول رو تونستم باز کنم ولی بقیه جلسات از حالت فایل رر خارج نمیشه و پیغام خطا میده و میگه که نیاز به سی دی داره
مدیر سایتادمین سایت ( مالک تایید شده )
@فرزانه,
سلام
مشکل شما به صورت آنلاین توضیح داده و رفع شد
امیر
باسلام
اگر معادله ای بصورت :
xdot=f+gu-d ظاهر شود علامت منفی اغتشاش چه تاثیری در مقدار K خواهد داشت؟ با توجه به اینکه قدر مطلق d- باید در معادله K ظاهر شود. البته منظورم در حالت کلی هست یعنی چه در روش مد لغزشی معمولی سوپرتویستینگ و ….
ممنونم
مدیر سایتادمین سایت ( مالک تایید شده )
@امیر,
سلام
اون منفی هیچ تاثیری در مقدار ضریب ساین نداره
شما فرض کنید عددی که در اغتشاش ضرب میشه متعلق به خود اغتشاش هست
سپاس
امیر
باسلام
یه سیستمی دارم که مجموعا دو لوپ داره: لوپ داخلی و لوپ خارجی. لوپ داخلی رو که به تنهایی با کنترلرمد لغزشی کنترل میکنم جواب میگیرم ولی وقتی لوپ خارجی رو با کنترل مد لغزشی کنترل میکنم سیستم ناپایدار میشه. جالبه حتی وقتی لوپ خارجی رو با یک کنترلر PI کنترل میکنم سیستم جواب میده. از طرفی وقتی فرض رو بر این میذارم که لوپ داخلی پاسخ سریعی داره و تابع تبدیل اون رو با عدد واحد جایگذاری می کنم لوپ خارجی با کنترلر مد لغزشی پایدار میشه. به نظرتون علت چی میتونه باشه؟
ممنونم
مدیر سایتادمین سایت ( مالک تایید شده )
@امیر,
سلام
ببینید شما باید همزمان دو تا لوپ رو با هم کنترل کنید و اثبات پایداری انجام بدید اینطوری نمیشه گفت که لوپ داخلی با کنترل کننده یک پایدار میشه و لوپ خارجی هم با کنترل کننده دو پایدار میشه و بعد نتیجه بگیرید که کل سیستم باید باید پایدار بشه . تا دلتون بخواد میشه مثال در این زمینه زد. ولی من یه روش رو پیشنهاد میکنم انجام بدید اما اثبات پایداری رو خودتون باید انجام بدید: شما به جای همون کنترل کننده تناسبی که در لوپ بیرونی استفاده کردید به جای خطا، ساین خطا رو قرار بدید و ضریب تناسبی رو افزایش بدید. حدس میزنم درست بشه
سپاس
امیر
بله ممنونم
من دقیقا هدفم اینه که هر دو لوپ داخلی و خارجی رو بطور همزمان با کنترلر مد لغزشی کنترل کنم ولی سیستم ناپایدار میشه. لوپ داخلی و لوپ خارجی هر دو از مرتبه اول هستند. لوپ خارجی با این فرض طراحی میشه که سرعت لوپ داخلی زیاده و تابع تبدیلی تقریبا برابر واحد داره. اثبات پایداری چطور انجام میشه؟ من دقیقا روال فیلم های آموزشی رو پیش میگیرم.
مدیر سایتادمین سایت ( مالک تایید شده )
@امیر,
سلام مجدد
اگر بر اساس فضای حالت پیش برید و کل معادلات حالت رو بنویسید و کنترل کننده رو بر اساس چیزهایی که توی فییلم توضیح دادم طراحی کنید و برنامه رو هم بر همون اساس بنویسید هیچ مشکلی پیش نمیاد
از حوزه تابع تبدیل ببرید در حوزه فضای حالت و پیش برید
سپاس