جلسه اول:
معرفی سیستمهای تاخیردار و مراجع مهم در این زمینه
در این جلسه ابتدا مفهوم تاخیر و معادلات دیفرانسیل تاخیردار با مثالهای متعدد در زمینههای گوناگون تشریح میشود. سپس انواع تاخیر از دید محل وقوع و ماهیت آن معرفی میشوند. در ادامه انواع روشهای موجود برای تحلیل و طراحی کنترل کننده برای سیستمهای تاخیردار معرفی شده و مزایا و معایب آنها بیان میشود. سپس کتابهای شاخص در زمینه سیستمهای تاخیردار معرفی شده و نقاط قوت و ضعف هر کدام مختصرا توضیح داده میشود. در انتها افراد مهم و تاثیرگذار در زمینه سیستمهای تاخیردار معرفی میشوند. جلسه اول به صورت رایگان تقدیم میشود.
مدت زمان آموزش: 106 دقیقه
حجم فایل: 362 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس و مراجع
جلسه اول:
جلسه دوم:
معرفی روش پله و نحوه شبیهسازی سیستمهای دارای تاخیر در حالت (جلسه اول بخش شبیهسازی)
در این جلسه نحوه شبیهسازی سیستمهای تاخیردار دارای تاخیر گسسته معرفی میشود. ابتدا روش پله (Step Method) معرفی شده و نحوه گسستهسازی سیستم با روش اویلر بیان میشود. سپس مثال 3-7 کتاب Boukas که دارای یک تاخیر گسسته ثابت است در محیط متلب پیادهسازی شده و اثر تغییر گام زمانی و تاخیر بر روی نتایج بررسی میشود. سپس مثال 2-1 کتاب Kharitonov که دارای دو تاخیر گسسته ثابت است در متلب شبیهسازی شده و نتایج بررسی میشوند. در انتها نحوه پیادهسازی تاخیر متغیر با زمان در قالب شبیهسازی مثال 3-4 کتاب Fridman ارائه شده و برای تاخیرهای متفاوت نتایج تحلیل میشوند.
مدت زمان آموزش: 80 دقیقه
حجم فایل: 151 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس، کتابها و کدهای متلب
پیش نمایش جلسه دوم:
جلسه سوم:
شبیهسازی سیستمهای دارای تاخیر متغیر با حالت و توزیع شده و سیستمهای خنثی
در این جلسه ابتدا نحوه گسستهسازی و شبیهسازی سیستمهای دارای تاخیر متغیر با حالت بیان شده و سپس مثال صفحه 74 کتاب Hartung با روش گفته شده شبیهسازی میشود. در ادامه نحوه گسستهسازی سیستمهای خنثی (Neutral) بیان شده و مثال صفحه 111 کتاب Kharitonov با این روش در محیط متلب شبیهسازی میشود. در بخش بعدی نحوه تقریب انتگرالهای موجود در تاخیرهای توزیع شده و الگوریتم کلی شبیهسازی سیستمهای دارای تاخیر توزیع شده معرفی شده و مثال صفحه 106 کتاب Fridman با این روش در محیط متلب پیادهسازی میشود. در همه حالتها، اثر تغییر گام زمانی و تاخیر زمانی بر روی پایداری بررسی میشود.
مدت زمان آموزش: 74 دقیقه
حجم فایل: 123 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس، کتابها و کدهای متلب
پیش نمایش جلسه سوم:
جلسه چهارم:
شبیهسازی سیستمهای دارای تاخیر در ورودی (جلسه آخر بخش شبیهسازی)
در این جلسه نحوه گسستهسازی و شبیهسازی سیستمهای دارای تاخیر در ورودی کنترلی تشریح میشود. ابتدا طی مثال 3-3 کتاب Boukas نحوه شبیهسازی سیستمهای دارای تاخیر در حالت و ورودی کنترلی بیان میشود. در ادامه با شبیهسازی مثال 5-1 کتاب Fridman، نحوه شبیهسازی سیستمهای دارای تاخیر در ورودی با کنترلکننده استاتیک یا بدون حافظه بیان میشود. در نهایت نحوه شبیهسازی کنترلکننده های دینامیک یا حافظهدار برای سیستمهای دارای تاخیر در ورودی طی شبیهسازی مثال 2-2 کتاب Krstic بیان میشود.
مدت زمان آموزش: 70 دقیقه
حجم فایل: 148 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس، کتابها و کدهای متلب
پیش نمایش جلسه چهارم:
جلسه پنجم:
تحلیل فرکانسی و تابع تبدیل سیستمهای تاخیردار (جلسه اول فصل 2)
از این جلسه تحلیل فرکانسی سیستمهای تاخیردار مطابق فصل دوم کتاب Fridman آغاز میشود. در این جلسه معادله مشخصه و پایداری سیستمهای تاخیردار مورد بررسی قرار میگیرد. ابتدا معادله مشخصه سیستمهای دارای تاخیر گسسته چندگانه و توزیع شده معرفی شده و سپس خواص ریشههای آن (قطبهای سیستم) بیان میشود. سپس معادله مشخصه سیستمهای خنثی معرفی شده و خواص ریشههای آن بیان میشود. در ادامه ماتریس تابع تبدیل سیستمهای تاخیردار معرفی میشود. در انتها اثر تاخیر کوچک بر روی پایداری سیستمهای RDE یا Retarded Differential Equation و NDE یا Neutral Differential Equation بررسی شده و مثالهای موجود در کتاب Fridman در محیط متلب شبیهسازی شده و نتایج تحلیل میشوند.
مدت زمان آموزش: 62 دقیقه
حجم فایل: 97 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس، کتاب Fridman و کدهای متلب
پیش نمایش جلسه پنجم:
جلسه ششم:
روش مستقیم (Direct Method) برای بررسی پایداری سیستمهای تاخیردار
در این جلسه روش مستقیم (Direct Method) برای بررسی پایداری سیستمهای دارای یک تاخیر گسسته معرفی میشود. ابتدا شروط اندازه و فاز برای پیدا کردن فرکانس گذر و تاخیر متناظر معرفی شده و نحوه تعیین پایدارساز بودن و یا ناپایدارساز بودن گذر از محور موهومی بیان میشود. سپس مثالهای 2-3 و 2-4 کتاب Fridman به عنوان مثالهای تاخیر ناپایدارساز مرور شده و در محیط متلب شبیهسازی میشوند. در انتها مثال 2-5 کتاب که مربوط به طراحی کنترلکننده تاخیردار برای اوسیلاتور میباشد، مرور شده و در محیط متلب شبیهسازی میشود.
مدت زمان آموزش: 77 دقیقه
حجم فایل: 131 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس، کتاب ها و کدهای متلب
پیش نمایش جلسه ششم:
جلسه هفتم:
کنترلپذیری (Controllability) و رویتپذیری (Observability) سیستمهای تاخیردار (جلسه آخر فصل 2)
در این جلسه کنترلپذیری (Controllability)، رویتپذیری (Observability)، پایداریپذیری (Stabilizability) و مشاهدهپذیری (Detectability) سیستمهای تاخیردار مورد بررسی قرار میگیرد. ابتدا کنترلپذیری سیستمهای تاخیردار تعریف شده و گرامیان کنترلپذیری معرفی میشود. سپس یک شرط جبری برای چک کردن کنترلپذیری سیستمهای تاخیردار ارائه شده و ارتباط آن با ماتریس کنترلپذیری سیستمهای بدون تاخیر بیان میشود. سپس رویتپذیری سیستمهای تاخیردار تعریف شده و گرامیان رویت پذیری معرفی میشود. سپس یک شرط جبری برای چک کردن رویت پذیری سیستمهای تاخیردار ارائه شده و ارتباط آن با ماتریس رویت پذیری سیستمهای بدون تاخیر بیان میشود. در انتها شروط پایداریپذیری و مشاهدهپذیری سیستمهای تاخیردار بیان شده و مثالهای کتاب مرور میشود و در نهایت مساله 2-4 کتاب Fridman حل میشود.
مدت زمان آموزش: 51 دقیقه
حجم فایل: 74 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس و کتاب Fridman
پیش نمایش جلسه هفتم:
جلسه هشتم:
معرفی تعاریف پایداری و روشهای کراسوفسکی و رازومیخین برای سیستمهای تاخیردار (جلسه اول فصل 3)
از این جلسه فصل سوم کتاب Fridman که مربوط به تحلیل زمانی سیستمهای تاخیردار است، آغاز میشود. در ابتدای جلسه تعاریف پایداری که برای سیستمهای تاخیردار تعمیم داده شدهاند بیان شده و مفاهیم پایداری یکنواخت (Uniform)، مجانبی (Asymptotic)، کلی (Global) برای سیستمهای تاخیردار تشریح میشود. سپس دو روش کراسوفسکی (Krasovskii) و رازومیخین (Razumikhin) که با استفاده از روش مستقیم لیاپونوف پایداری سیستمهای تاخیردار را مورد بررسی قرار میدهد معرفی میشوند. در ادامه قضیه پایداری سیستمهای تاخیردار (RDE (Retarded Differential Equations با استفاده از تابعکهای لیاپونوف کراسوفسکی (LKF (Lyapunov-Krasovskii Functionals ارائه میشود. در انتها پایداری یک سیستم غیرخطی با استفاده از قضیه لیاپونوف کراسوفسکی بررسی میشود (مثال 3-1 کتاب Fridman).
مدت زمان آموزش: 74 دقیقه
حجم فایل: 102 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس و کتاب Fridman
پیش نمایش جلسه هشتم:
جلسه نهم:
کاربرد نامساویهای ماتریسی خطی (LMI) در تحلیل پایداری سیستمهای تاخیردار و معرفی نامعینی های پلیتاپیک
در ابتدای این جلسه قضیه پایداری سیستمهای تاخیردار (RDE (Retarded Differential Equations با استفاده از توابع لیاپونوف-رازومیخین (Razumikhin-Lyapunov Functions) ارائه میشود.سپس قضیه پایداری سیستمهای تاخیردار (NDE (Neutral Differential Equations با استفاده از تابعکهای لیاپونوف کراسوفسکی Lyapunov-Krasovskii Functionals) LKF) ارائه میشود.
در ادامه به معرفی مختصر نامساویهای ماتریسی خطی (LMI) پرداخته و نحوه استفاده از آن برای تحلیل پایداری سیستمها مورد بررسی قرار میگیرد. همچنین سیستمهای دارای نامعینی پلی تاپیک (Polytopic Uncertainties) معرفی شده و نحوه تحلیل پایداری مقاوم آنها با استفاده از LMI طی یک مثال تشریح میشود. در نهایت دو نتیجه مهم که در کار با LMI مورد نیاز هستند بررسی میشوند: لم شور (Schur Complement) و S-Procedure.
مدت زمان آموزش: 59 دقیقه
حجم فایل: 83 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس و کتاب Fridman
پیش نمایش جلسه نهم:
جلسه دهم:
استخراج شروط LMI مستقل از تاخیر با استفاده از روشهای کراسوفسکی و رازومیخین و حل مثالهای 3-3، 3-4 و 3-5
در این جلسه با استفاده از S-Procedure و تبدیل متجانس (Congruent Transformation)، شروط LMI مستقل از تاخیر (Delay-Independent) برای سیستم دارای یک تاخیر متغیر با زمان استخراج میشود. ابتدا از روش کراسوفسکی یک LMI مستقل از تاخیر و وابسته به مشتق تاخیر (Rate-Dependent) استخراج میشود. سپس برای همین سیستم از روش رازومیخین یک LMI مستقل از تاخیر و مستقل از مشتق تاخیر (Rate-Independent) استخراج میشود. سپس مزایا و معایب هر دو شرط LMI بدست آمده مورد بررسی قرار میگیرد. در ادامه مثالهای 3-3، 3-4 و 3-5 کتاب Fridman مرور میشوند. در انتها برای مثال 3-4 با استفاده از تولباکس YALMIP، LMI های هر دو روش کراسوفسکی و رازومیخین داخل محیط متلب حل شده و سیستم شبیهسازی میشود.
توجه: لازم به ذکر است که آشنایی با حل LMI در متلب جزو پیشنیازهای این مجموعه بوده و در اینجا تنها از تولباکس YALMIP استفاده میشود. برای اطلاعات بیشتر در مورد نحوه حل LMI با تولباکس YALMIP در متلب، به مجموعه آموزش حل ناتساویهای ماتریسی خطی (LMI) با متلب مراجعه کنید.
مدت زمان آموزش: 90 دقیقه
حجم فایل: 129 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس، کتاب Fridman و کد متلب
پیش نمایش جلسه دهم:
جلسه یازدهم:
استخراج شرط مستقل از تاخیر پایداری مقاوم با استفاده از روشهای کراسوفسکی و حل مثال 3-6
در ابتدای این جلسه شرط مستقل از تاخیر پایداری مقاوم برای سیستمهای RDE دارای نامعینی پلی تاپیک بر اساس روش کراسوفسکی و با استفاده از لمهایی نظیر مکمل شور (Schur Complement) استخراج میشود. سپس شرط مستقل از تاخیر پایداری مقاوم برای سیستمهای RDE دارای نامعینی نرم محدود (Norm-Bounded Uncertainty) بر اساس روش کراسوفسکی استخراج میشود. در ادامه مثال 3-6 کتاب Fridman مرور شده و کدهای متلب مربوط به حل LMI های مربوط به هر دو نامعینی پلیتاپیک و نرم محدود ارائه میشود. در انتها شرط مستقل از تاخیر پایداری مقاوم برای سیستمهای خنثی NDE بر اساس روش کراسوفسکی استخراج میشود.
مدت زمان آموزش: 66 دقیقه
حجم فایل: 96 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس، کتاب Fridman و کد متلب
پیش نمایش جلسه یازدهم:
جلسه دوازدهم:
معرفی سیستمهای توصیفی و استخراج شرط LMI مستقل از تاخیر برای آنها
در ابتدای این جلسه سیستمهای توصیفی (Descriptor Systems) یا سیستمهای تکین (Singular Systems) فرم کانونیکال آنها معرفی میشود. سپس نحوه تبدیل سیستمهای خنثی به مدل توصیفی بیان میشود. در ادامه تعریف پایداری برای سیستمهای توصیفی تاخیردار (با تعداد دلخواه تاخیر گسسته) بیان شده و سپس قضیه کراسوفسکی برای این نوع سیستمها معرفی میشود. با استفاده از این قضیه و با تعریف یک LKF مناسب، یک شرط LMI مستقل از تاخیر برای سیستمهای توصیفی تاخیردار استخراج میشود. در انتها مثال 1 مقاله 2002 Fridman حل شده و LMI مربوطه در محیط متلب و با تولباکس YALMIP حل میشود.
مدت زمان آموزش: 70 دقیقه
حجم فایل: 107 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس، کتاب و مقاله Fridman و کد متلب
پیش نمایش جلسه دوازدهم:
جلسه سیزدهم:
معرفی روش توصیفی برای استخراج شروط LMI و حل مثال 3-8
در ابتدای این جلسه محدودیت شروط مستقل از تاخیر بیان شده و لزوم استفاده از شروط LMI وابسته به تاخیر در قالب یک مثال اسکالر تشریح میشود. سپس مزایای روش استفاده از روش توصیفی برای استخراج شروط کافی بیان میشود. در همین راستا، برای یک سیستم بدون تاخیر ولی دارای نامعینی پلی تاپیک شرط پایداری از روش توصیفی استخراج شده و محافظهکاری کمتر آن در قالب مثال 3-8 و با شبیهسازی هر دو شرط توصیفی و غیر توصیفی در متلب نشان داده میشود. در انتها نحوه اعمال روش توصیفی به سیستمهای گسسته بیان میشود.
مدت زمان آموزش: 71 دقیقه
حجم فایل: 100 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس، کتاب Fridman و کد متلب
پیش نمایش جلسه سیزدهم:
جلسه چهاردهم:
معرفی روش توصیفی برای استخراج شروط LMI مستقل از تاخیر و وابسته به تاخیر و روش ماتریسهای وزنی آزاد
در ابتدای این جلسه نحوه استفاده از روش توصیفی برای استخراج LMI مستقل از تاخیر با روش کراسوفسکی بیان میشود و مزیت آن نسبت به LMI مستقل از تاخیر ارائه شده در جلسه 11 (بدون استفاده از روش توصیفی) تشریح میشود.سپس تکنیک ماتریسهای وزنی آزاد که در کتاب Niculescu 2001 و Wu 2010 بررسی شدهاند، معرفی میشوند. در ادامه ناتساوی مهم جنسن (Jensen’s Inequality) و نسخه توسعهیافته آن معرفی میشوند. با استفاده از ناتساوی جنسن و مکمل شور، برای یک سیستم دارای تاخیر گسسته متغیر با زمان دو شرط وابسته به تاخیر استخراج میشوند که در یکی از آنها از روش توصیفی استفاده شده است و در دیگری استفاده نشده است. برای یک مثال اسکالر این شروط در محیط متلب حل شده و نشان داده میشود که این شروط ساده دارای محافظهکاری زیادی هستند.
مدت زمان آموزش: 74 دقیقه
حجم فایل: 107 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس، کتاب Fridman و کد متلب
پیش نمایش جلسه چهاردهم:
جلسه پانزدهم:
بهبود LMI حاصل از روش توصیفی (کاهش محافظهکاری) و حل مثالهای 3-9 و 3-10
جلسه چهاردهم شروط ساده وابسته به تاخیر استخراج شدند. در این جلسه با روش کراسوفسکی برای دو حالت تاخیر ثابت و متغیر با زمان شروط بهبود یافته (دارای محافظهکاری کمتر) استخراج میشوند. برای تاخیرهای متغیر با زمان، دو LMI وابسته به تاخیر یکی با استفاده از روش توصیفی و دیگری بدون استفاده از آن محاسبه میشوند. همچنین این دو شرط کافی مقایسه شده و مزایا و معایب هر کدام تشریح میشود. در ادامه نحوه استفاده از این شروط بهبود یافته برای تحلیل پایداری سیستمهای دارای نامعینی پلی تاپیک بیان میشود. در انتها مثالهای 3-9 و 3-10 کتاب Fridman مرور شده و LMI های بدست آمده برای این دو مثال حل شده و با نتایج شروط ساده (جلسه 14) مقایسه میشوند.
مدت زمان آموزش: 67 دقیقه
حجم فایل: 103 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس، کتاب Fridman و کد متلب
پیش نمایش جلسه پانزدهم:
جلسه شانزدهم:
معرفی روش محدب متقابل برای کاهش محافظهکاری و حل مثالهای 3-11 و 3-12
در ابتدای این جلسه روش محدب متقابل (Reciprocally Convex Approach) معرفی میشود که برای کاهش بیشتر محافظهکاری در سیستمهای تاخیردار توسط Park در سال 2011 معرفی شده است. سپس مثالهای 3-11 و 3-12 کتاب در محیط متلب حل شده و محافظهکاری پایین روش محدب نشان داده میشود. در ادامه شروط LMI کاهش یافته (Reduced-order LMI Conditions) معرفی میشوند. این روش با کاهش تعداد متغیرهای تصمیمگیری ابعاد LMI ها و در نتیجه بار محاسباتی مساله را کاهش میدهد.
مدت زمان آموزش: 61 دقیقه
حجم فایل: 96 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس، کتاب Fridman و کد متلب
پیش نمایش جلسه شانزدهم:
جلسه هفدهم:
استخراج شروط کافی LMI برای پایداری سیستمهای دارای تاخیرهای غیر کوچک و حل مثالهای 3-13 و 3-14
در ابتدای این جلسه سیستمهای دارای تاخیر غیر کوچک (Non-Small Delay) یا Interval Time-Delay معرفی میشوند که برای تاخیرهای کوچک ناپایدار هستند. سپس سیستم نامی برای این نوع سیستمها تعریف شده و LKF مناسب برای تحلیل پایداری با روش کراسوفسکی از آن استخراج میشود. سپس شرط کافی LMI برای پایداری این نوع سیستمها برای تاخیرهای کند و سریع ارائه میشود. در انتها مثالهای 3-13 و 3-14 کتاب Fridman در محیط متلب حل شده و شبیهسازی میشوند.
مدت زمان آموزش: 61 دقیقه
حجم فایل: 99 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس، کتاب Fridman و کد متلب
پیش نمایش جلسه هفدهم:
جلسه هجدهم:
تحلیل پایداری سیستمهای دارای تاخیر توزیع شده با روش کراسوفسکی و حل مثالهای 3-15، 3-16 و 3-17
در این جلسه پایداری سیستمهای خطی دارای تاخیر توزیع شده مورد بررسی قرار میگیرد. تحلیل پایداری این سیستمها در دو حالت مختلف با روش کراسوفسکی انجام شده و دو LMI برای تضمین پایداری سیستم ارائه میشود. در ادامه مثالهای 3-15، 3-16 و 3-17 در محیط متلب حل شده و با نتایج کتاب مقایسه میشود. در انتها پایداری سیستمهای دارای تاخیر توزیع شده با کرنل متغیر با زمان بررسی شده و نحوه تبدیل مساله به LMI تشریح میشود.
مدت زمان آموزش: 64 دقیقه
حجم فایل: 100 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس، کتاب Fridman و کد متلب
پیش نمایش جلسه هجدهم:
جلسه نوزدهم:
معرفی تابعک های لیاپانوف کلی برای سیستمهای خطی تاخیردار
در این جلسه تابعک های لیاپانوف کلی یا (GLF (General Lyapunov Functionals برای سیستمهای خطی تاخیردار معرفی میشوند. ابتدا GLF با در نظر گرفتن یک ساختار از پیش تعیین شده برای مشتق آن استخراج میشود. سپس با اضافه کردن جمله اصلاحی تابعک لیاپونوف کامل یا (CLF (Complete Lyapunov Functional استخراج میشود. در انتها تابعک لیاپونوف گسستهسازی شده یا (DLF (Discretized Lyapunov Functional معرفی میشود. با DLF میتوان مسایل مقدار مرزی (Boundary Value Problem) را که در CLF پیش میآید، به شروط LMI تبدیل کرد.
مدت زمان آموزش: 58 دقیقه
حجم فایل: 86 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس، کتاب Fridman
پیش نمایش جلسه نوزدهم:
جلسه بیستم:
گسستهسازی CLF و حل مثالهای 5-10 و 5-11 کتاب Kharitonov
در این جلسه نحوه گسستهسازی CLF معرفی شده در جلسه قبل طبق بخش 5-7 کتاب Kharitonov توضیح داده شده و فرایند تبدیل CLF به DLF تشریح میشود. ابتدا شرط مثبت بودن تابع لیاپونوف با صورت یک LMI فرمولبندی شده و سپس منفی بودن مشتق تابع لیاپونوف با یک LMI دیگر تضمین میشود. در انتها مثالهای 5-10 و 5-11 کتاب Kharitonov با استفاده از تولباکس YALMIP در محیط متلب حل شده و نتایج تحلیل میشود.
مدت زمان آموزش: 75 دقیقه
حجم فایل: 130 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس، کتاب Fridman و Kharitonov و کدهای متلب
پیش نمایش جلسه بیستم:
جلسه بیست و یکم:
تحلیل پایداری سیستمهای تاخیردار با استفاده از نامساوی ویرتینگر و حل مثالهای 3-18، 3-19، 3-20 و 3-21
در این جلسه ناتساوی ویرتینگر (Wirtinger’s inequality) و کاربرد آن در تحلیل پایداری سیستمهای تاخیردار معرفی میشود (بخش 3-10 کتاب فریدمن). ابتدا نامساوی انتگرالی ویرتینگر معرفی شده و سپس نسخه بهبود یافته آن ارائه میشود. سپس برای سیستم خطی شامل تاخیرهای گسسته و توزیع شده شرط LMI برای پایداری سیستم با استفاده از تابع لیاپونوف الحاقی و ناتساوی ویرتینگر استخراج میشود. در انتها مثالهای 3-18، 3-19، 3-20 و 3-21 در محیط متلب شبیهسازی شده و نتایج تحلیل میشوند. لازم به ذکر است که برای حل تمام LMI ها در متلب، از تولباکس YALMIP استفاده شده است.
مدت زمان آموزش: 73 دقیقه
حجم فایل: 113 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس، کتاب Fridman و کدهای متلب
پیش نمایش جلسه بیست و یکم:
جلسه بیست و دوم:
تحلیل پایداری سیستمهای غیرخطی لیپشیتز و معرفی ناحیه جذب (جلسه آخر فصل 3)
در این جلسه تحلیل پایداری سیستمهای تاخیردار غیرخطی. مورد بررسی قرار میگیرد. ابتدا نحوه تحلیل پایداری سیستمهای تاخیردار غیرخطی با جملات غیرخطی لیپشیتز (Lipschitz nonlinearity) در حوزه فرکانس با استفاده از نامساوی گرونوال (Gronwall’s inequality) بیان میشود.در ادامه نحوه تحلیل پایداری سیستمهای تاخیردار غیرخطی با جملات غیرخطی لیپشیتز در حوزه زمان و با استفاده از تابع لیاپونوف بررسی میشود. در نهایت یک شرط ناتساوی برای پایداری برای کلاس خاصی از سیستمهای غیرخطی دارای ورودی افاین استخراج شده و مفهوم ناحیه جذب (Domain of Attraction) معرفی میشود.
مدت زمان آموزش: 67 دقیقه
حجم فایل: 98 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس و کتاب Fridman
پیش نمایش جلسه بیست و دوم:
جلسه بیست و سوم:
معرفی مفهوم پایداری نمایی و نامساوی هالانی و حل مثال 4-1 (جلسه اول فصل 4)
در این جلسه فصل چهارم کتاب فریدمن که مربوط به تحلیل عملکرد سیستمهای تاخیردار میباشد، آغاز میشود. ابتدا مفهوم پایداری نمایی برای سیستمهای تاخیردار بیان شده و تفاوت آن با پایداری مجانبی بیان میشود. سپس با اصلاح LKF مورد استفاده در فصل قبل، یک شرط کافی برای پایداری نمایی سیستمهای تاخیردار (دارای تاخیر با تغییرات کند) بر اساس روش لیاپونوف-کراسوفسکی استخراج میشود. در ادامه نامساوی هالانی (Halanay’s Inequality) معرفی شده و با استفاده از آن یک شرط LMI برای پایداری نمایی سیستمهای تاخیردار (دارای تاخیر با تغییرات دلخواه) استخراج میشود. در انتها، مثال 4-1 کتاب فریدمن به طور کامل در محیط متلب حل شده و نتایج تحلیلی میشوند.
مدت زمان آموزش: 68 دقیقه
حجم فایل: 107 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس، کتاب Fridman و کد متلب
پیش نمایش جلسه بیست و سوم:
جلسه بیست و چهارم:
معرفی مفاهیم ISS و Passivity برای سیستمهای تاخیردار و حل مثال 4-2
در ابتدای این جلسه مفهوم (ISS (Input to State Stability بودن سیستمهای تاخیردار معرفی شده و سپس شرط LMI مورد نیاز برای ISS بودن سیستم استخراج میشود. در ادامه مفهوم Passivity و Positive Realness تشریح شده و شرط کافی برای پسیو بودن سیستم استخراج میشود. همچنین شرط کافی برای پسیو بودن سیستمهای خنثی نیز محاسبه میشود. در انتها مثال 4-2 کتاب در محیط متلب حل شده و نتایج تحلیل میشوند.
مدت زمان آموزش: 62 دقیقه
حجم فایل: 109 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس، کتاب Fridman و کدهای متلب
پیش نمایش جلسه بیست و چهارم:
جلسه بیست و پنجم:
معرفی مفهوم بهره L2 برای سیستمهای تاخیردار و حل مثال 4-3
در این جلسه پایداری بهره (L2 (L2-gain Stability برای سیستمهای تاخیردار مورد بررسی قرار میگیرد. ابتدا مفاهیم نرم و کنترل برای سیستمهای بدون تاخیر معرفی شده و رابطه آن با بهره L2 سیستم تشریح میشود. سپس مفهوم بهره L2 به سیستمهای تاخیردار توسعه داده شده و با استفاده از روش لیاپونوف شرط LMI لازم برای تحلیل L2 سیستم استخراج میشود. در انتها مثال 4-3 کتاب در محیط متلب شبیهسازی شده و نتایج تحلیل میشوند.
مدت زمان آموزش: 56 دقیقه
حجم فایل: 95 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس، کتاب Fridman و کد متلب
پیش نمایش جلسه بیست و پنجم:
جلسه بیست و ششم:
معرفی روش ورودی خروجی و قضیه بهره کوچک و استخراج شروط پایداری به صورت LMI
در این جلسه پایداری و بهره L2 به روش ورودی خروجی مورد بررسی قرار میگیرد. ابتدا نحوه تبدیل سیستم تاخیردار به صورت یک اتصال فیدبک از دو سیستم تشریح میشود. سپس پایداری ورودی خروجی سیستم تعریف شده و رابطه آن با نرم بینهایت سیستم تشریح میشود. در ادامه قضیه بهره کوچک (Small Gain Theorem) معرفی شده و اثبات آن مرورو میشود. در انتها با استفاده از قضیه بهره کوچک، شروط پایداری به صورت LMI و برای حالتهای مختلف تاخیر (تغییرات کند و تند) استخراج میشود.
مدت زمان آموزش: 72 دقیقه
حجم فایل: 106 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس و کتاب Fridman
پیش نمایش جلسه بیست و ششم:
جلسه بیست و هفتم:
تحلیل پایداری و بهره L2 برای سیستمهای دارای تاخیر غیر کوچک با روش ورودی خروجی و حل مثال 4-4
در این جلسه پایداری و بهره L2 برای سیستمهای دارای تاخیر غیر کوچک و با روش ورودی خروجی مورد بررسی قرار میگیرد. ابتدا سیستم خطی تاخیردار با تاخیر نامعین معرفی شده و دو حالت تاخیر با تغییرات محدود و نامحدود در نظر گرفته میشود. سپس از قضیه بهره کوچک باند بالای نرم L2 سیستم جهت تضمین پایداری محاسبه شده و با معرفی یک تابع لیاپونوف برای سیستم نامی (Nominal System)، شروط LMI لازم برای تضمین پایداری سیستم استخراج میشود. در انتها، مثال 4-4 کتاب فریدمن در محیط متلب حل شده و نتایج تحلیل میشوند.
مدت زمان آموزش: 58 دقیقه
حجم فایل: 91 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس، کتاب Fridman و کد متلب
پیش نمایش جلسه بیست و هفتم:
جلسه بیست و هشتم:
بهره L2 سیستمهای دارای نامعینی پارامتری و سیستمهای دارای تاخیر بینهایت و معرفی اصل بول-پرون
در ابتدای این جلسه بهره L2 سیستمهای دارای نامعینی پارامتری تحلیلی شده و شرط کافی آن استخراج میشود. سپس با استفاده از اصل بول-پرون (Bohl-Perron) اثبات میشود که پایداری ورودی خروجی سیستمهای خطی متغیر با زمان تاخیردار معادل پایداری نمایی همان سیستم است. در ادامه به بررسی پایداری و بهره L2 برای سیستمهای دارای تاخیر بینهایت میپردازیم. مفهوم کرنل یک تاخیر توزیع شده و تاخیر با توزیع گاما (Gamma-Distributed Delay) معرفی شده و دینامیک جریان ترافیک (Traffic Flow Model) به عنوان یک کاربرد تاخیر بینهایت ارائه میشود. در نهایت نامساوی انتگرالی جنسن برای تاخیر بینهایت توسعه داده میشود.
مدت زمان آموزش: 72 دقیقه
حجم فایل: 103 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس و کتاب Fridman
پیش نمایش جلسه بیست و هشتم:
جلسه بیست و نهم:
استخراج شرط کافی پایداری نمایی و تحلیل بهره L2 برای سیستمهای دارای تاخیر توزیع شده بینهایت و حل مثالهای 4-5 و 4-6
در ابتدای این جلسه شرط کافی پایداری نمایی سیستمهای دارای تاخیر توزیع شده بینهایت با مجموع کرنلهای اسکالر استخراج میشود. سپس مثال 4-5 کتاب Fridman در محیط نرمافزار متلب حل شده و نتایج تحلیل میشوند. در ادامه تحلیل بهره L2 برای سیستمهای دارای تاخیر توزیع شده بینهایت انجام شده و شروط LMI کافی برای آن ارائه میشود. در انتها، مثال 4-6 کتاب Fridman در محیط متلب حل شده و نتایج تحلیل میشوند.
مدت زمان آموزش: 74 دقیقه
حجم فایل: 126 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس، کتاب Fridman و کدهای متلب
پیش نمایش جلسه بیست و نهم:
جلسه سی ام:
تحلیل پایداری نمایی سیستمهای دارای تاخیر با توزیع گاما و دارای شکاف و حل مثال 4-7
در این جلسه پایداری نمایی سیستمهای دارای تاخیر با توزیع گاما و دارای شکاف مورد بررسی قرار میگیرد. ابتدا نحوه تبدیل یک سیستم دارای تاخیر توزیع شده به یک سیستم با تاخیر گسسته تشریح شده و برای هر دو حالت N=1 و N>1 شروط کافی پایداری نمایی سیستم با در نظر گرفتن تابعک لیاپونوف الحاقی (Augmented Lyapunov Functional) استخراج میشوند. در ادامه همان مباحث قبلی برای تاخیرهای محدود تکرار شده و شروط کافی پایداری نمایی استخراج میشود. در انتها، مثال 4-7 کتاب فریدمن در محیط متلب حل شده و نتایج تحلیل میشوند.
مدت زمان آموزش: 65 دقیقه
حجم فایل: 103 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس، کتاب Fridman، مقاله Solomon2009 و کدهای متلب
پیش نمایش جلسه سی ام:
جلسه سی و یکم:
تحلیل پایداری نمایی برای سیستمهای تاخیردار آشفته تکین و حل مثال 4-8
در ابتدای این جلسه سیستمهای تاخیردار آشفته تکین (Singularly Perturbed Time-Delay Systems) معرفی شده و زیر سیستمهای سریع و کند آن تشریح میشود. در ادامه یک تابع لیاپونوف-کراسوفسکی مناسب برای این نوع سیستمها ارائه شده و با استفاده از آن شرط لازم برای پایداری نمایی سیستم استخراج میشود. در نهایت مثال 4-8 کتاب در محیط متلب حل شده و نتایج تحلیل میشوند.
مدت زمان آموزش: 65 دقیقه
حجم فایل: 124 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس، کتاب Fridman، مقاله Glizer2011 و کدهای متلب
پیش نمایش جلسه سی و یکم:
جلسه سی و دوم:
تحلیل پایداری PDE های انتشاری تاخیردار و حل مثال 4-9 (جلسه آخر فصل 4)
در ابتدای PDE های انتشاری تاخیردار (Diffusion Time-Delayed Partial Differential Equations) معرفی شده و کاربردهای آن مختصرا بیان میشود. سپس شروط مستقل از تاخیر پایداری نمایی برای این نوع سیستمها با استفاده از نامساوی هالانی (Halanay’s Inequality) استخراج میشود. در ادامه، شروط وابسته به تاخیر پایداری نمایی برای این نوع سیستمها با ترکیب روش کراسوفسکی و توصیفی استخراج میشود. در انتها، مثال 4-9 کتاب در محیط متلب حل شده و نتایج تحلیل میشوند.
مدت زمان آموزش: 75 دقیقه
حجم فایل: 112 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس، کتاب Fridman و کد متلب
پیش نمایش جلسه سی و دوم:
جلسه سی و سوم:
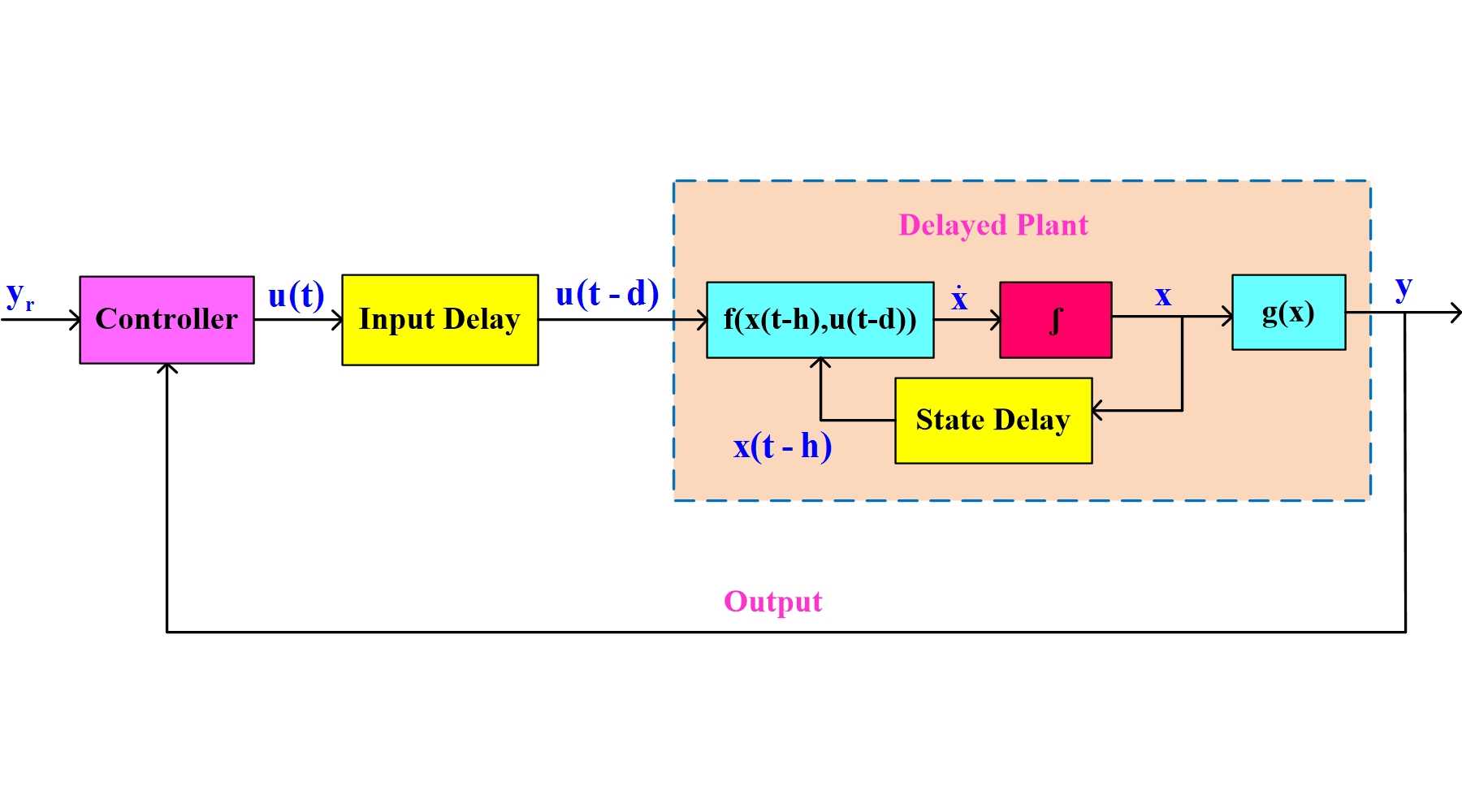
معرفی روشهای مختلف کنترل سیستمهای پیوسته دارای تاخیر در ورودی و یا حالت (جلسه اول فصل 5)
جلسه سی و سوم: در این جلسه انواع روشهای موجود برای پایدارسازی سیستمهای تاخیردار معرفی میشوند. ابتدا انواع تاخیرهای موجود مرور شده و سپس روشهای متداول برای پایدارسازی سیستمهای دارای تاخیر در ورودی و حالت معرفی میشوند. در ادامه روشهای کنترل حافظهدار (Memory Control) و بدون حافظه (Memory-Less Control) برای جبران تاخیر در ورودی تشریح میشوند. در نهایت ساختار کنترلکنندههای بر اساس پیشبینی (Prediction-based) معرفی شده و مزایا و معایب روشهای مختلف بررسی میشود.
مدت زمان آموزش: چهل و نه دقیقه
حجم فایل: 134 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس، کتابها و مقالات مورد اشاره
پیش نمایش جلسه سی و سوم:
جلسه سی و چهارم:
معرفی روش کاهش بر اساس روش پیشبینی برای سیستمهای دارای تاخیر در ورودی و کنترل بهینه LQR با افق نامحدود
جلسه سی و چهارم: در ابتدای جلسه کنترل بر اساس پیشبینی یا حافظهدار برای سیستمهای خطی با تاخیر ثابت در ورودی معرفی میشود. سپس روش کاهش بر اساس روش پیشبینی برای سیستمهای دارای تاخیر ثابت و متغیر با زمان (نامعین) تشریح میشود. در ادامه کنترل بهینه LQR با افق نامحدود برای سیستمهای دارای تاخیر ثابت در ورودی و حالت مورد بررسی قرار میگیرند. همچنین روش حافظهدار برای کنترل مقاوم سیستمهای دارای تاخیر ثابت در حالت توسعه داده میشود. در انتها تحلیل پایداری سیستمهای تاخیردار با استفاده از روش همیلتونین به طور خلاصه مطرح میشود.
مدت زمان آموزش: یک ساعت و پنج دقیقه
حجم فایل: 90 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس، کتاب Fridman
پیش نمایش جلسه سی و چهارم:
جلسه سی و پنجم:
کنترل مقاوم سیستمهای تاخیردار با استفاده از LMI و حل مثال 5-1
جلسه سی و پنجم: در این جلسه پایدارسازی سیستمهای تاخیردار خطی با استفاده از نامساوی ماتریسی خطی (LMI) مورد بررسی قرار میگیرد. ابتدا بر اساس نتایج بدست آمده در بخش 3-6 کتاب (جلسه 16) شروط کافی طراحی کنترلکننده برای سیستمهای تاخیردار استخراج میشوند. در ادامه روش کنترل مقاوم جهت تضعیف اغتشاش سیستمهای دارای تاخیر نامعین (متغیر با زمان) در ورودی اعمال شده و شروط کافی پایداری استخراج میشوند. سپس همین روش برای سیستمهایی که علاوه بر تاخیر و اغتشاش، دارای نامعینی پلی تاپیک نیز هستند، توسعه داده میشود. در انتها مثال 5-1 کتاب در محیط متلب حل شده و نتایج تحلیل میشوند.
مدت زمان آموزش: یک ساعت و هشت دقیقه
حجم فایل: 108 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس، کتاب Fridman و کدهای متلب
پیش نمایش جلسه سی و پنجم:
جلسه سی و ششم:
فیلترینگ ∞H سیستمهای تاخیردار خطی با استفاده از نامساوی ماتریسی خطی و اعمال آن به سیستم تعلیق خودرو
جلسه سی و ششم: در این جلسه فیلترینگ ∞H سیستمهای تاخیردار خطی با استفاده از نامساوی ماتریسی خطی (LMI) مورد بررسی قرار میگیرد. ابتدا رویتگر لیونبرگر اصلاح شده برای سیستم دارای تاخیر در خروجی معرفی شده و سپس شروط کافی برای تضمین شرط ∞H ارائه میشود. در ادامه روش معرفی شده در کتاب بر روی یک مدل یک چهارم سیستم تعلیق خودرو پیاده میشود. در انتها سیستم تعلیق پسیو و رویتگر لیونبرگر در محیط متلب شبیهسازی شده و نتایج تحلیل میشوند.
مدت زمان آموزش: یک ساعت و چهار دقیقه
حجم فایل: 131 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس، مراجع مورد اشاره و کد متلب
پیش نمایش جلسه سی و ششم:
جلسه سی و هفتم:
تحلیل پایداری و عملکرد سیستمهای تاخیردار با روش DLF و حل مثالهای 5-2 و 5-3
جلسه سی و هفتم: در این جلسه تحلیل پایداری و تحلیل سیستمهای خنثای دارای تاخیر گسسته و توزیع شده با استفاده از تابعک لیاپونوف گسستهسازی شده (مشابه جلسه 20) مورد بررسی قرار میگیرد. ابتدا CLF متناظر با سیستم در نظر گرفته شده و سپس با روش موجود در کتاب Kharitonov تابعک لیاپونوف گسستهسازی میشود. در ادامه روش توصیفی با DLF ترکیب شده و شروط کافی برای برقراری شرط بهره L2 سیستم استخراج میشود. در انتها مثالهای 5-2 و 5-3 در محیط متلب حل شده و نتایج تحلیل میشوند.
مدت زمان آموزش: یک ساعت و سی و سه دقیقه
حجم فایل: 166 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس، مراجع مورد اشاره و کد متلب
پیش نمایش جلسه سی و هفتم:
جلسه سی و هشتم:
کنترل مقاوم سیستمهای تاخیردار خنثای با روش DLF و اعمال آن به سیستم محفظه موتور راکت (مثال 5-4 کتاب)
جلسه سی و هشتم: در این جلسه طراحی کنترلکننده مقاوم برای سیستمهای خنثای دارای تاخیر گسسته و توزیع شده با استفاده از تابعک لیاپونوف گسستهسازی شده (مشابه جلسه 20) مورد بررسی قرار میگیرد. ابتدا با استفاده از نتایج جلسه قبل (شروط تحلیل پایداری و مقاومت)، شروط کافی برای طراحی کنترلکننده مقاوم استخراج میشود. سپس با استفاده از شروط LMI بدست آمده، برای سیستم محفظه موتور راکت (مثال 5-4 کتاب) دو کنترلکننده مقاوم که یکی استاتیک و دیگری توزیع شده هستند، طراحی میشوند. در انتها برای حالتهای مختلف و با کنترلکنندههای استاتیک و توزیع شده سیستم حلقه بسته در محیط متلب شبیهسازی شده و نتایج تحلیل میشوند.
مدت زمان آموزش: یک ساعت و هجده دقیقه
حجم فایل: 155 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس، مراجع مورد اشاره و کدهای متلب
پیش نمایش جلسه سی و هشتم:
جلسه سی و نهم:
معرفی مفاهیم اشباع عملگر و بازه اول تاخیر و استخراج شروط پایداری نمایی
جلسه سی و نهم: در ابتدای این جلسه مفهوم اشباع عملگر (Actuator Saturation) معرفی شده و اهمیت آن در طراحی تشریح میشود. سپس مفهوم بازه اول تاخیر معرفی شده و باند بالای پاسخ در آن استخراج میشود. در ادامه LKF متناظر برای بازههای مختلف ارائه شده و شروط پایداری نمایی برای همگرایی LKF استخراج میشوند. در انتها نحوه توسعه این روش به سیستمهای دارای اغتشاش توصیف میشود.
مدت زمان آموزش: پنجاه و هشت دقیقه
حجم فایل: 91 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس و مراجع مورد اشاره
پیش نمایش جلسه سی و نهم:
جلسه چهلم:
معرفی مفهوم ناحیه جذب و استخراج شروط لازم برای وارد نشدن به ناحیه اشباع
جلسه چهلم: در ابتدای این جلسه مفهوم ناحیه جذب (Domain of Attraction) و تابع اشباع معرفی میشوند. سپس برای سیستم بدون تاخیر شروط کافی LMI برای وارد نشدن در ناحیه اشباع استخراج میشود. در ادامه به روش مشابه برای سیستمهای دارای تاخیر نیز شروط LMI مورد نیاز برای پایداری و وارد نشدن به ناحیه اشباع استخراج میشوند. همچنین روشی معرفی میشود که با استفاده از آن میتوان تخمین ناحیه جذب را ماکزیمم کرد. در انتها نحوه اعمال نتایج بدست آمده برای سیستمهای دارای نامعینی پلیتاپیک تشریح میشود.
مدت زمان آموزش: پنجاه و نه دقیقه
حجم فایل: 84 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس و مراجع مورد اشاره
پیش نمایش جلسه چهلم:
جلسه چهل و یکم:
حل مثالهای 5-5 و 5-6 و معرفی روش شرط قطاعی کلیشده (جلسه آخر فصل 5)
جلسه چهل و یکم: در ابتدای این جلسه مثالهای 5-5 و 5-6 به طور کامل در محیط متلب حل شده و نتایج تحلیل میشوند. علاوه بر حل شروط LMI، تخمین ناحیه جذب (ناحیه بیضوی) رسم شده و سیستم حلقه بسته شبیهسازی میشود. در ادامه روش شرط قطاعی کلیشده (Generalized Sector Condition) معرفی شده و LMI های آن استخراج میشوند. در انتها نحوه تحلیل سیستمهای دارای تاخیر متغیر با حالت معرفی میشود.
مدت زمان آموزش: یک ساعت و دوازده دقیقه
حجم فایل: 154 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس، مراجع مورد اشاره و کدهای متلب
پیش نمایش جلسه چهل و یکم:
جلسه چهل و دوم:
معرفی روش الحاق جهت حذف تاخیر در سیستمهای گسسته تاخیردار و حل مثال 6-1 (جلسه اول فصل 6)
جلسه چهل و دوم: از این جلسه، فصل ششم کتاب آغاز میشود که مربوط به تحلیل و کنترل سیستمهای گسسته زمان تاخیردار است. در ابتدا روش الحاق (Augmentation) جهت تبدیل سیستمهای گسسته تاخیردار به سیستم گسسته بدون تاخیر معرفی میشود. سپس تابع تبدیل سیستم گسسته دارای تاخیرهای متعدد در حالت و ورودی ارائه میشود. در ادامه روش تحلیل پایداری سیستمهای گسسته تاخیردار با روش لیاپونوف رازومیخین بررسی شده و یک شرط مستقل از تاخیر برای این نوع سیستمها استخراج میشود. در انتها مثال 6-1 کتاب در محیط متلب حل شده و نتایج تحلیل میشود.
مدت زمان آموزش: یک ساعت و دوازده دقیقه
حجم فایل: 117 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس، مراجع مورد اشاره و کدهای متلب
پیش نمایش جلسه چهل و دوم:
جلسه چهل و سوم:
استخراج LMI های وابسته به تاخیر برای سیستمهای گسسته تاخیردار و حل مثال 6-2
جلسه چهل و سوم: در این جلسه LMI های وابسته به تاخیر با استفاده از تابع لیاپونوف-کراسوفسکی برای سیستمهای گسسته تاخیردار مورد بررسی قرار میگیرد. ابتدا روش تحلیل پایداری سیستمهای گسسته تاخیردار با استفاده از تابعک لیاپونوف-کراسوفسکی ارائه میشود. به علاوه ورژن گسسته نامساوی جنسن معرفی میشود. سپس با استفاده از نامساوی جنسن، روش محدب متقابل (جلسه 16) و روش توصیفی، از طریق تابعک لیاپونوف کراسوفسکی LMI های وابسته به تاخیر برای سیستمهای گسسته دارای تاخیر متغیر با زمان استخراج میشود. در ادامه LMI های وابسته به تاخیر برای سیستمهای گسسته دارای تاخیر ثابت ارائه میشود. در انتها مثال 6-2 در محیط متلب به طور کامل حل شده و نتایج تحلیل میشوند.
مدت زمان آموزش: پنجاه و هفت دقیقه
حجم فایل: 100 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس، مراجع مورد اشاره و کدهای متلب
پیش نمایش جلسه چهل و سوم:
جلسه چهل و چهارم:
معرفی پایداری ورودی به حالت، تحلیل بهره L2 و نامساوی هالانی برای سیستمهای گسسته تاخیردار
جلسه چهل و چهارم: در ابتدای این جلسه تعریف پایداری ورودی به حالت (Input to State Stability) برای سیستمهای گسسته انجام شده و تحلیل بهره L2 برای سیستمهای گسسته تاخیردار با استفاده از روش لیاپونوف-کراسوفسکی مورد بررسی قرار میگیرد. سپس شروط LMI مورد نیاز برای پایداری نمایی سیستمهای گسسته تاخیردار با استفاده از روش لیاپونوف-کراسوفسکی استخراج میشود. در ادامه ورژن گسسته نامساوی هالانی معرفی میشود. در انتها پایداری ورودی خروجی برای سیستمهای گسسته تاخیردار مورد بررسی قرار گرفته و LMI های مورد نیاز برای آن استخراج میشوند.
مدت زمان آموزش: یک ساعت و یک دقیقه
حجم فایل: 92 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس و مراجع مورد اشاره
پیش نمایش جلسه چهل و چهارم:
جلسه چهل و پنجم:
معرفی LQR با افق نامحدود، روش کاهش و کنترلکننده Guaranteed Cost Control برای سیستمهای گسسته تاخیردار و حل مثال 6-3
جلسه چهل و پنجم: در این جلسه کنترل سیستمهای گسسته تاخیردار مورد بررسی قرار میگیرد. ابتدا مساله LQR با افق نامحدود (Infinite Horizon Linear Quadratic Gaussian) برای سیستمهای گسسته دارای تاخیر در حالت با استفاده روش الحاقی حل شده و سپس LQR با افق نامحدود برای سیستمهای گسسته دارای تاخیر در ورودی با استفاده از روش الحاقی حل میشود. سپس روش کاهش (Reduction method) بر اساس پیشبینی برای سیستمهای گسسته دارای تاخیر در ورودی مورد بررسی قرار میگیرد. در ادامه نحوه طراحی کنترل کننده (Guaranteed Cost Control) برای سیستمهای دارای تاخیر نامعین در ورودی با استفاده از LMI ارائه شده و توسعه آن به سیستمهای دارای ماتریسهای نامعین پلیتاپیک بررسی میشود. در انتها مثال 6-3 در محیط متلب حل شده و نتایج شبیهسازی تحلیل میشوند.
مدت زمان آموزش: یک ساعت و هفت دقیقه
حجم فایل: 99 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس، مراجع مورد اشاره و کد متلب
پیش نمایش جلسه چهل و پنجم:
جلسه چهل و ششم:
استخراج LMI های مورد نیاز برای پایداری نمایی سیستمهای گسسته تاخیردار تحت اشباع ورودی و حل مثال 6-4 (جلسه آخر فصل 6)
جلسه چهل و ششم: در این جلسه کنترل سیستمهای گسسته تاخیردار تحت اشباع ورودی مورد بررسی قرار میگیرد. در ابتدا کران بالای پاسخ سیستم از روش لیاپونوف-کراسوفسکی وابسته به تاخیر محاسبه میشود. سپس LMI های مورد نیاز برای پایداری نمایی سیستمهای گسسته تاخیردار تحت اشباع ورودی استخراج میشوند. در انتها مثال 6-4 کتاب در محیط متلب حل شده و نتایج تحلیل میشوند.
مدت زمان آموزش: یک ساعت و یک دقیقه
حجم فایل: 150 مگابایت
محتویات درس: فیلم با کیفیت 720p، پاورپوینت درس، مراجع مورد اشاره و کد متلب
پیش نمایش جلسه چهل و ششم:
برای خرید هر فصل به تب خرید موضوعی بروید
 مرجع مهندسی كنترل | دانش با کیفیت در مرز علم
مرجع مهندسی كنترل | دانش با کیفیت در مرز علم






دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.