در این جلسه سیستم کوادروتور از لحاظ سخت افزاری و عملکردی به طور کامل توضیح داده می شود. این جلسه تحت عنوان پیش درامدی بر کوادروتور ارایه می شود.
مدت زمان: 70 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس
کیفیت: 720P
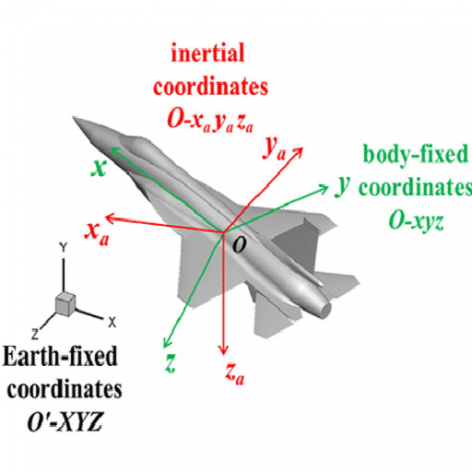
در این جلسه مفهوم پایه ای عملکرد سیستم کوادروتور، معرفی محورهای فرضی حاکم بر سیستم، نحوه انتقال از فریم بدنه به فریم اینرسایی و بالعکس و همچنین نحوه استخراج معادلات دینامیکی موتورهای براشلس DC مورد استفاده در سیستم کوادروتور به طور کامل توضیح داده می شود. . این جلسه تحت عنوان مدلسازی سیستم کوادروتور بخش (1) ارایه می شود.
مدت زمان: 52 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس
کیفیت: 720P
در این جلسه مدل ریاضی کوادروتور شامل متغیرهای حالت سیستم به طور کامل بررسی می شود. در ادامه معادلات دینامیکی حاکم بر سیستم کوادروتور از طریق دو روش نیوتن-اویلر و همچنین اویلر-لاگرانژ به صورت جداگانه و به تفصیل توضیح داده می شود. این جلسه تحت عنوان مدلسازی سیستم کوادروتور بخش (2) ارایه می شود.
مدت زمان: 53 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس
کیفیت: 720P
در این جلسه مدل ریاضی سیستم کوادروتور از منظری دیگر مورد بررسی قرار می گیرد و مدلسازی سیستم کوادروتور بر مبنای تعاریف علم سینماتیک و علم دینامیک انجام و معادلات ریاضی سیستم استخراج می گردد . در ادامه نیروها و گشتاورهای وارد بر سیستم کوادروتور به طور کامل توضیح داده می شوند و در نهایت نحوه به دست اوردن معادلات فضای حالت سیستم شرح داده می شود. این جلسه تحت عنوان مدلسازی سیستم کوادروتور بخش (3) ارایه می شود.
مدت زمان: 52 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس
کیفیت: 720P
در این جلسه به علم ایرودینامیک پرواز پرداخته می شود. نیروهای ایرودینامیکی به طور کامل توضیح داده می شوند و سپس ایرودینامیک عمودپروازها به طور اختصاصی برای سیستم کوادروتور مطرح و روابط ان استخراج می گردد. در ادامه نحوه محاسبه سرعت و مسیر باد که مهمترین عامل اغتشاش خارجی بر هم زننده تعادل این سیستم پرنده می باشد، مطرح می گردد. این جلسه تحت عنوان ایرودینامیک پرواز (1) ارایه می شود.
مدت زمان: 70 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس
کیفیت: 720P
این جلسه در ادامه جلسه پنجم ، به تکمیل روابط ریاضی ایرودینامیک پرواز سیستم کوادروتور می پردازد. در ادامه روش های محاسبه نیروی دراگ جهت تخمین بردار و مسیر باد به طور کامل شرح داده می شوند و در نهایت معادلات فضای حالت سیستم کوادروتور به همراه اثرات ایرودینامیکی استخراج می گردند. این جلسه تحت عنوان ایرودینامیک پرواز (2) ارایه می شود.
مدت زمان: 50 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس
کیفیت: 720P
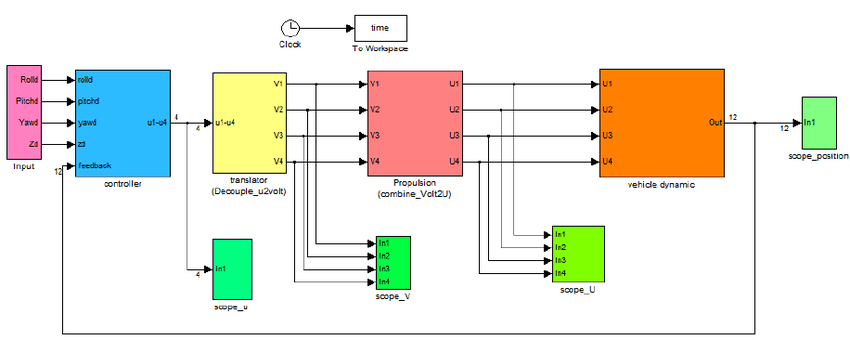
در این جلسه به ساختار کنترلی سیستم کوادروتور پرداخته می شود و تمامی لایه های کنترلی به همراه بلوک دیاگرام انها و ارتباط بین هریک از این لایه های کنترلی به طور کامل مطرح می گردد . دانش کسب شده در این جلسه پیش زمینه طراحی هر نوع کنترلر دلخواه برای این سیستم پرنده می باشد.
مدت زمان: 66 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس
کیفیت: 720P
در این جلسه فیلتر کالمن پیوسته توسعه یافته به عنوان یک مشاهده گر و تخمین زننده مطرح در سیستم های غیر خطی معرفی می گردد و در نهایت نحوه تخمین متغیرهای حالت سیستم کوادروتور بر مبنای این نوع فیلتر خاص به طور کامل توضیح داده می شود..
مدت زمان: 70 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس
کیفیت: 720P
در این جلسه نحوه پیاده سازی روش کنترلی مد لغزشی بر روی سیستم کوادروتور به صورت تیوری و به صورت شبیه سازی شده در نرم افزار متلب اموزش داده می شود.
مدت زمان: 72 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس ، m-file های نرم افزار متلب
کیفیت: 720P
در این جلسه نحوه پیاده سازی الگوریتم بهینه سازی ژنتیک به عنوان یک روش تحلیلی ، جهت محاسبه دقیق تری از پارامترهای کنترل کننده مد لغزشی اموزش داده می شود.
مدت زمان: 74 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس ، m-file های نرم افزار متلب
کیفیت: 720p
در این جلسه نحوه پیاده سازی فیلتر کالمن پیوسته توسعه یافته ، جهت تخمین متغیرهای حالت سیستم کوادروتور در نرم افزار متلب اموزش داده می شود.
مدت زمان: 47 دقیقه
فایل های همراه: فایل تصویری ، m-file های نرم افزار متلب
کیفیت: 720p
در این جلسه نحوه پیاده سازی کنترل کننده پسگام (Backstepping) ، بر روی سیستم کوادروتور به صورت تیوری و به صورت شبیه سازی شده در نرم افزار متلب اموزش داده می شود.
مدت زمان: 57 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس ، m-file های نرم افزار متلب
کیفیت: 720p
در این جلسه اموزشی ، نحوه پیاده سازی یک کنترل کننده مقاوم و بهینه ترکیبی(ROSMC) بر مبنای معادلات ریکاتی وابسته به حالت ( SDRE) تحت عنوان (Robust Optimal Sliding Mode Control based on SDRE) ، بر روی سیستم کوادروتور به صورت تیوری و به صورت شبیه سازی شده در نرم افزار متلب در چهار بخش جداگانه به صورت زیر اموزش داده می شود.
مدت زمان جلسه :4 ساعت و30 دقیقه
فایل های همراه جلسه: فایل تصویری ، فایل پاورپوینت درس ، ، m-file های نرم افزار متلب
بخش اول :
طراحی قانون کنترل بهینه مقاوم با استفاده از کنترل کننده مد لغزشی بر اساس معادلات
ریکاتی وابسته به حالت
مدت زمان بخش اول : 2 ساعت و 5 دقیقه
فایل های همراه بخش اول: فایل تصویری ، فایل پاورپوینت درس ، فایل PDF پاورپوینت درس
پیش نمایش جلسه اول
بخش دوم:
برنامه نویسی روش کنترلی Robust Optimal Sliding Mode based on SDRE
در حالت Point to Point
مدت زمان بخش دوم : 1 ساعت و 5 دقیقه
فایل های همراه بخش دوم: فایل تصویری ، فایل پاورپوینت درس ، m-file های نرم افزار متلب
پیش نمایش بخش دوم
بخش سوم :
برنامه نویسی روش کنترلی Robust Optimal Sliding Mode based on SDRE
در حالت Trajectory Tracking
مدت زمان بخش سوم : 35 دقیقه
فایل های همراه بخش سوم: فایل تصویری ، فایل پاورپوینت درس ، m-file های نرم افزار متلب
پیش نمایش بخش سوم
بخش چهارم :
برنامه نویسی روش کنترلی Robust Optimal Sliding Mode based on SDRE
جهت محاسبه خطای Minimum Mean Square Error
مدت زمان بخش چهارم 45 دقیقه
فایل های همراه بخش چهارم : فایل تصویری ، فایل پاورپوینت درس ، m-file های نرم افزار متلب
پیش نمایش بخش چهارم
در این جلسه اموزشی ، نحوه پیاده سازی کنترل کننده گام به عقب(Backstepping) به صورت ترکیب با فیلتر کالمن توسعه یافته پیوسته (Extended Kalman Bucy Filter) در حالت ردیابی یک مسیر از پیش تعیین شده (Trajectory Tracking) ، بر روی سیستم کوادروتور به صورت شبیه سازی شده در نرم افزار متلب اموزش داده می شود.
مدت زمان جلسه :45 دقیقه
فایل های همراه جلسه: فایل تصویری ، m-file های نرم افزار متلب
 مرجع مهندسی كنترل | دانش با کیفیت در مرز علم
مرجع مهندسی كنترل | دانش با کیفیت در مرز علم



حسین
سلام .ممنون از اموزش های خوبتون.
ببخشید جلسات بعدی این اموزش کی ارایه خواهد شد؟
مهندس بابایی
@حسین,
با سلام
از حسن توجه شما ممنونیم. در اولین فرصت، جلسات بعدی به مرور بر روی سایت قرار خواهند گرفت.
موفق باشید.
امیر
سلام
نحوه انتقال روی میکرو رو هم اگه امکان داره بفرمایید و یه جلسه به اون اختصاص بدید
مهندس بابایی
@امیر,
با سلام
از پیشنهاد شما تشکر می کنیم. در حال حاضر تمرکز این مجموعه بر روی ارایه مسایل مربوط به تحلیل شرایط طراحی انواع کنترل کننده ها می باشد، اما امیدواریم پیاده سازی سخت افزاری این سیستم نیز در اینده ای نزدیک در سرفصل های این مجموعه اموزشی قرار گیرد.
موفق باشید.
ابراهیم
سلام.
شما خداییش خیلی گرون فروشید این قیمت ها واسه یه دانشجو واقعا زیاد نیست
مثلا آموزش قیمت آردینو شما با سایت فرادرس اصلا قابل مقایسه نیست؟
مدیر سایتادمین سایت ( مالک تایید شده )
@ابراهیم,
سلام آقای مهندس
خوب هستین؟
ممنون بابت نظری که دادید.
ببینید مهندس، شعار اصلی ما کیفیت هستش. کیفیتی که در کل سایت ما هست در هیچ سایتی در این زمینه پیدا نخواهید کرد. حداقل الان که اینطوره. اما در مورد قیمت ها، ما هر هفته یک کد تخفیف برای کلیه محصولاتمون ارائه میکنیم که قیمتش خیلی کمتر میشه. بعنوان مثال همین کواد روتور خب قیمت تک جلسه هاش 10 تومانه ولی کسی بخاد کلشو بخره میتونه با قیمت هشت تومان هر جلسه رو خریداری کنه. حالا تصور بفرمایید یک کد تخفیف سی درصد هم بهش بخوره در این صورت هر جلسه میشه تقریبا 5 هزار و پونصد تومان!
خب حالا فکر کنم دیگه قیمت های ما خیلی هم نسبت به سایتهایی که فرمودید بالا نیستن. اما کیفیت قطعا بالاتره.
ضمن اینکه شما اینجا قابلیت خرید تک جلسه رو هم دارید اما در سایتهایی که فرمودید این قابلیت وجود نداره
با تشکر
مهندس بابایی
@مهدی,
سلام
به علت اختلال ایجاد شده در سایت، پاسخ سوالات برای دوستان با کمی تاخیر قابل مشاهده بود.
موفق باشید.
مهندس بابایی
@مهدی,
سلام
به علت اختلال ایجاد شده در سایت، پاسخ ها با کمی تاخییر قابل مشاهده بودند. پاسخ شما در دیدگاه بعدی که ارسال نموده بودید، داده شده است.
موفق باشید.
مهدی
پیش نیازی برای یادگیری این متلب هست یا نه
مهندس بابایی
@مهدی,
سلام
مجموعه اموزشی تهیه شده در این بخش، به زبانی کاملا ساده و گویا تمام مطالب کلیدی مورد نیاز را پوشش می دهد. لذا ضرورتی برای مطالعه پیش نیاز خاصی نیست.
موفق باشید.
محمد
سلام اموزش جلسه 9 لینک دانلودش مشکل دارد لطف می کنید بررسی کنید
شماره تراکنش بانکی: 45552067658
مدیر سایتادمین سایت ( مالک تایید شده )
@محمد,
سلام
بفرمایید دقیقا چه مشکلی داره؟
با تشکر
محمد
خطا می دهد که فایلی برای دانلود پیدا نشد. خطا 404
مدیر سایتادمین سایت ( مالک تایید شده )
@محمد,
سلام کدوم جلسه رو خریداری فرمودین؟
مهندس بابایی
@مهدی,
سلام
مجموعه اموزشی تهیه شده در این بخش، به زبانی کاملا ساده و گویا تمام مطالب کلیدی مورد نیاز را پوشش می دهد. لذا ضرورتی برای مطالعه پیش نیاز خاصی نیست.
موفق باشید.
نعیم
سلام.
تشکر فراوان بابت تدریس این مجموعه. چه زمانی شبیه سازی ها تدریس میشه؟
مهندس بابایی
@نعیم,
سلام.
با تشکر از بیان نظرتان.
همانطور که عنوان شده بود در هر بخشی که نیاز به ارایه شبیه سازی های متلب باشد، قطعا برای شما اموزش داده خواهد شد. به عنوان مثال در جلسه نهم، پیاده سازی روش کنترل مد لغزشی و شبیه سازی ان در نرم افزار متلب تدریس شده است.
موفق باشید.
مهدی
سلام ببخشید مدرس این بخش کدوم یک از اساتید هستش