 مرجع مهندسی كنترل | دانش با کیفیت در مرز علم
مرجع مهندسی كنترل | دانش با کیفیت در مرز علم
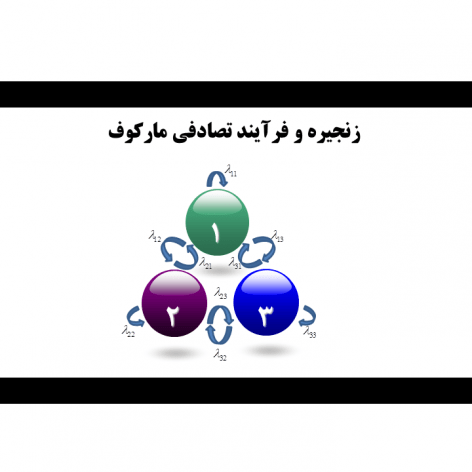
در این پست آموزش ویدئویی زنجیره و فرآیند تصادفی مارکوف قرار داده شده است. زنجیره مارکوف (Markov Chain) یا فرآیند مارکوف (Markov…
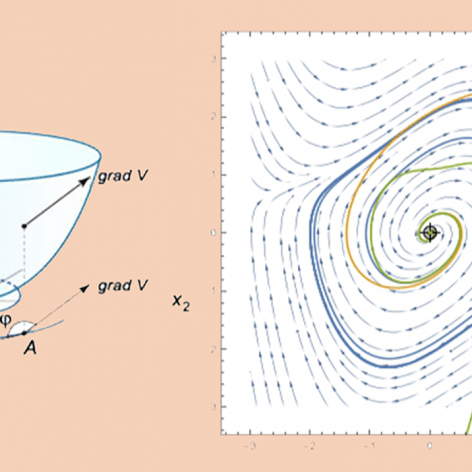
بسیاری از سیستمهای کنترل به صورت غیرخطی مدل میشوند تا با پدیده مدل شده تطابق کافی داشته باشد. به همین جهت سیستمهای…

سیستمهای ناوبری یکی از اجزای لاینفک سیستمهای کنترل و هدایت موشکها، هواپیماها و … هستند. هدف یک سیستم ناوبری تعیین وضعیت و…
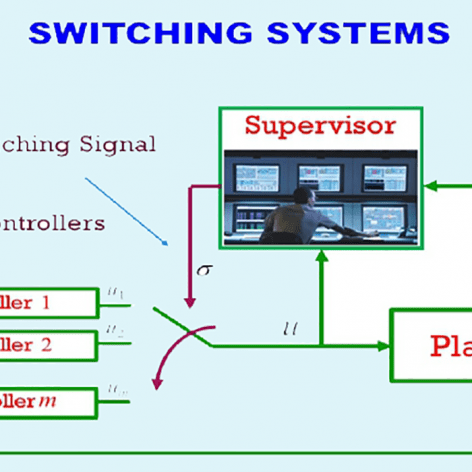
طی چند سال اخیر بحث سیستمهای هایبرید (Hybrid Systems) بسیار داغ شده است. این سیستم ها با قابلیت تلفیق حالت های پیوسته…
مهندسی کنترل ارتباط تنگاتنگی با علوم ریاضی و به خصوص جبر خطی دارد. درک بهتر مفاهیم کنترلی مستلزم تسلط بر مباحث مختلف…

در این پست آموزش ریاضیات مهندسی قرار داده خواهد شد. آموزش های زیادی در زمینه آموزش ریاضیات مهندسی توی اینترنت وجود داره….

در این پست آموزش سیگنال و سیستم قرار داده خواهد شد. آموزش های زیادی در زمینه آموزش سیگنال و سیستم توی اینترنت…
در این پست آموزش کنترل خطی قرار داده خواهد شد. آموزش های زیادی در زمینه آموزش کنترل خطی توی اینترنت وجود داره….
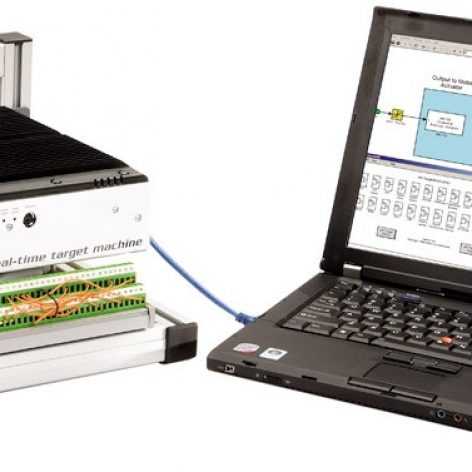
امروزه با توجه به قابلیتهای بالای نرم افزار Matlab و Simulink، متخصصان حوزه های مختلف طراحی های خود را در محیط سیمیولینک انجام میدهند. در بسیاری از کاربردهای تحقیقاتی، علمی و صنعتی، نیاز به برقراری ارتباط سخت افزاری وجود دارد.
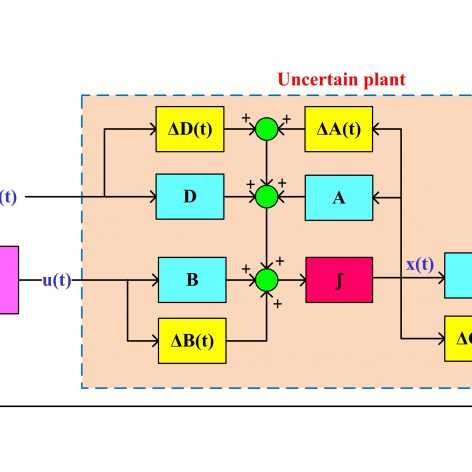
در این سری جلسات قرار است همه این عوامل یکجا در نظر گرفته شده و سیستمهای خطی دارای نامعینی و اغتشاش تنها با فیدبک تعدادی از حالتها کنترل شود و نامساویهای مربوط به این مساله استخراج شود.
در این پست آموزش معادلات دیفرانسیل قرار داده شده است. آموزش های زیادی در زمینه آموزش معادلات دیفرانسیل توی اینترنت وجود داره….

در سری فیلمهای حاضر دقیقا این مشکل مدنظر قرار گرفته و هدف طراحی یک کنترلکننده مقاوم برای سیستمهای خطی تحت تاثیر اغتشاش فقط با استفاده از یک یا چند خروجی سیستم است.
در این پست آموزش مدارهای الکتریکی قرار داده شده است. آموزش های زیادی در زمینه آموزش مدارهای الکتریکی توی اینترنت وجود دارد. آقای دکتر اسداللهی رتبه اول ارشد و دکترا این آموزش را در اختیار شما قرار میدهند.

یک کنترل کننده مقاوم دینامیک برای سیستمهای خطی تحت نامعینی پارامتری به گونهای طراحی میشود که فقط از خروجی (یا خروجی های) سیستم برای کنترل استفاده میکند و نیازی به تمام حالتها ندارد.

همونطور که میدانید در سیستمهایی که با کنترل کننده فیدبک حالت پایدارسازی انجام میشود، باید تمامی حالتها اندازهگیری شده و در دسترس باشند. در برخی از سیستمهای کنترل، امکان به کارگیری کنترل کننده فیدبک حالت وجود ندارد.
