 مرجع مهندسی كنترل | دانش با کیفیت در مرز علم
مرجع مهندسی كنترل | دانش با کیفیت در مرز علم
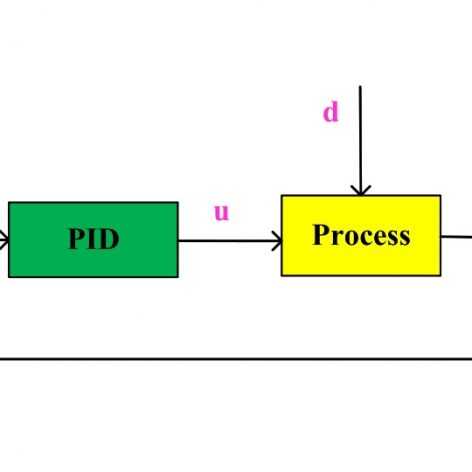
کنترل تناسبی-انتگرالی مشتقی یا PID یکی از اولین و رایجترین کنترل کننده های مورد استفاده در صنعت است. با توجه به خواص…
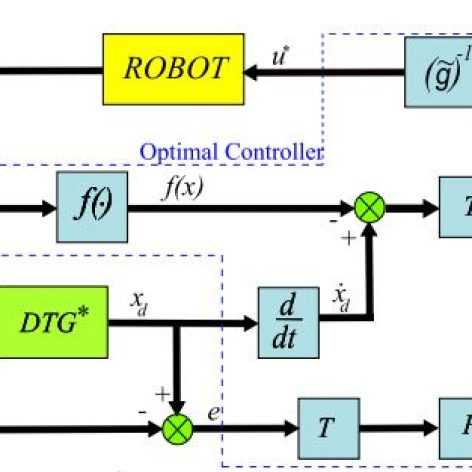
شبیه سازی مقاله ژورنال Asian Journal of Control سال 2013 Wiley Online Library Global Optimal Feedback‐Linearizing Control of Robot Manipulators کنترل…
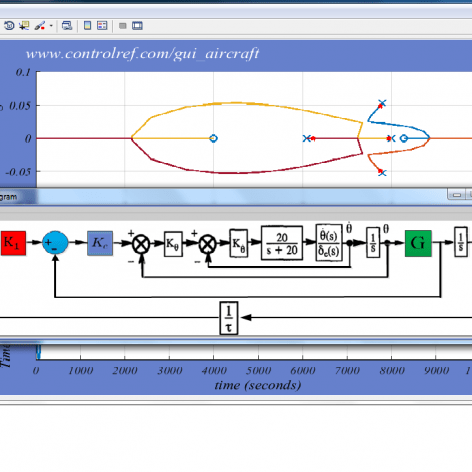
مباحثی که خدمت شما بزرگواران ارائه می شود، مربوط به کنترل هواپیما است که از پارت دوم از کتاب Roskam تدریس شده…

واسط های گرافيکي که در این قسمت ارائه شده است، مربوط به درس فیلتر کالمن از کتاب DanSimon است که دوست خوبم…
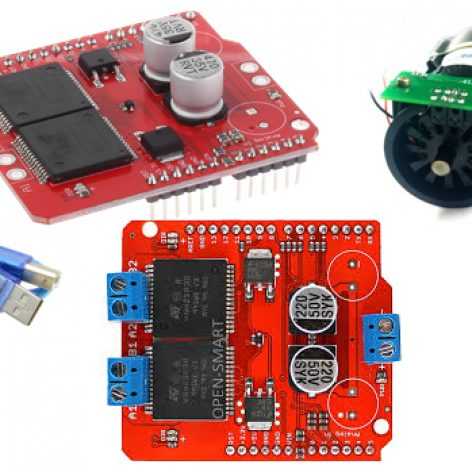
در بسیاری از کارهای تحقیقاتی و صنعتی موتورهای DC نقش عمده ای دارند. در مباحث رباتیک و یا مکانیزمهای گوناگون، کنترل کردن…
در این دوره ارتباط لب ویو (LabVIEW) و آردوینو (Arduino) آموزش داده میشود. با اتصال لب ویو به برد آردوینو میتوان یک کارت تبادل داده ساده ساخت و از آن در اجرای پروژهها بهره جست. هزینه تهیه برد آردوینو بسیار کمتر از تهیه کارتهای تبادل داده بوده و گزینه مناسبی برای پروژههای دانشجویی است.در این آموزش سعی شده تمامی نکاتی که برای اتصال آردوینو به لب ویو لازم است بیان شود.
در اينجا، يک واسط گرافيکي و يا guiيي در متلب توليد شده که با استفاده از آن به طور اتوماتیک مي توانید…

درسالهای اخیر Arduino رشد چشمگیری در دنیای الکترونیک داشته است. آردوینو یک برد اپن سورس مناسب برای نمونه سازی می باشد و بر اساس…

در اينجا، يک واسط گرافيکي و يا guiيي در متلب توليد شده که با استفاده از آن براحتي مي توان يک کنترل کننده PID براي يک سيستم طراحي کرد که در پروژه هاي دانشجويي مي تواند بسيار کمک کننده باشد. اين gui ميتواند بدون استفاده از روش هاي کلاسيک، يک کنترل کننده PID تروتميز را در اختيار دانشجويان قرار دهد.
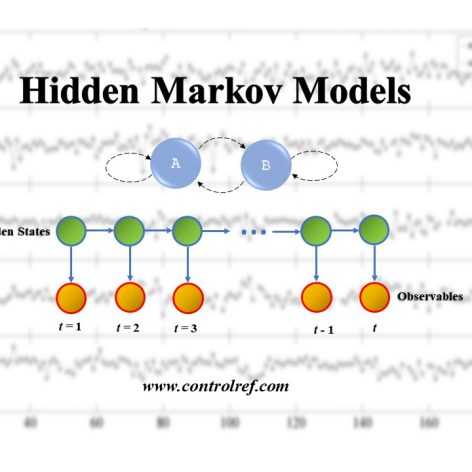
در مدلهای مارکوف معمولی (Markov models)، حالت ها (States) به طور مستقیم قابل مشاهده هستند (Observable) و یک زنجیره یا فرآیند مارکوف تنها با مشخص بودن احتمالات گذار و یا نرخ های گذرا خود قابل معرفی است.
پایداری هواپیما شامل دو بخش پایداری استاتیکی و دینامیکی بوده و به ترتیب عبارت است از تمایل ذاتی هواپیما در مخالفت با هر گونه اغتشاش داخلی (دستورات خلبان) یا بازگشت به حالت تعادل اولیه پس از برخورد هر گونه اغتشاش خارجی (تلاطمات جوی و باد).
کنترل بهینه دارای تعارف جدید و روش های ریاضی پیچیده ای برای حل مسائل است. مرجع مهندسی کنترل سری آموزش بهینه را برای شما آماده کرده است.

این پست مربوط به جلسات مجموعه آموزشی مدلسازی و شبیه سازی 6 درجه آزادی هواپیما است. اصطلاح انگلیسی این عبارت 6DOF Aircraft Modeling and Simulation است.
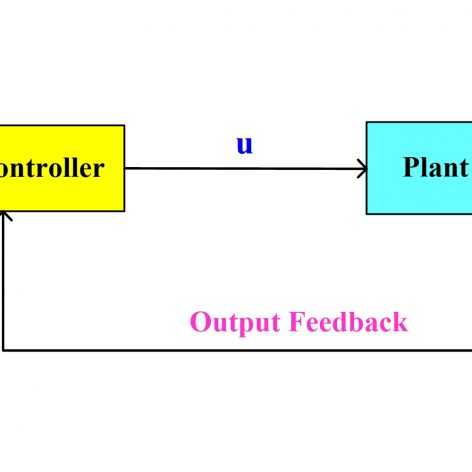
در واقع LQG از یک کنترلکننده بهینه LQR و یک فیلتر کالمن تشکیل شده است که فیلتر کالمن از خروجیهای سیستم تخمین حالتها را در هر لحظه محاسبه کرده و در اختیار کنترلکننده LQR قرار میدهد.
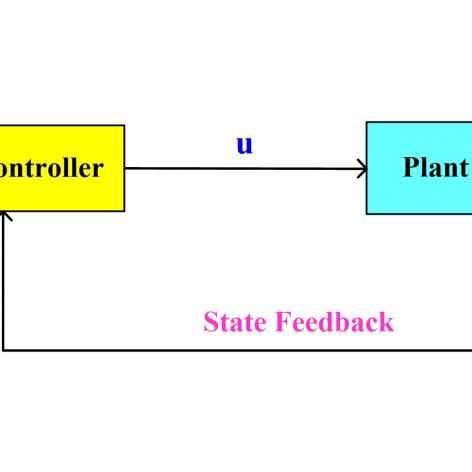
کنترل بهینه (Optimal Control) به عنوان یکی از روشهای مدرن کنترلی، جایگاه ویژهای در بحث سیستمهای کنترل دارد. یکی از روشهای کنترلی بهینه رگولاتور درجه دوم خطی (Linear Quadratic Regulator) است که به اختصار LQR خوانده میشود.
