 مرجع مهندسی كنترل | دانش با کیفیت در مرز علم
مرجع مهندسی كنترل | دانش با کیفیت در مرز علم
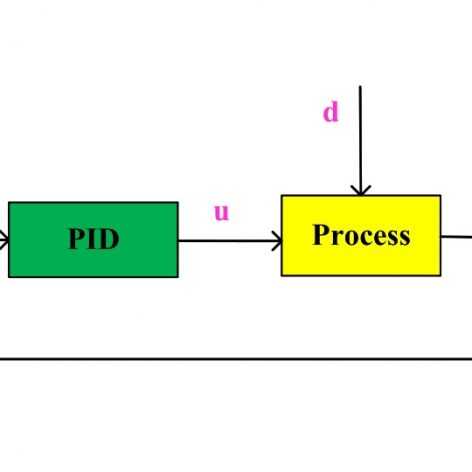
کنترل تناسبی-انتگرالی مشتقی یا PID یکی از اولین و رایجترین کنترل کننده های مورد استفاده در صنعت است. با توجه به خواص…

شبیه سازی مقاله ژورنال Nonlinear Dynamics) Springer) سال 2012 Analysis and control of a hyperchaotic system with only one nonlinear term توضیحات…
شبیه سازی مقاله کنفرانس IEEE Conference on Decision and Control, سال 2002 Global stabilization of a PVTOL aircraft with bounded thrust …
شبیه سازی مقاله ژورنال (Journal of vibration and control (SAGE publications سال 2012 Control for a class of four-dimensional chaotic systems with…
شبیه سازی مقاله ژورنال (Elsevier (Applied soft computing سال 2011 Adaptive fuzzy sliding mode control using supervisory fuzzy control for 3 DOF…
واسط های گرافيکي که در این قسمت ارائه شده است، مربوط به درس فیلتر کالمن از کتاب DanSimon است که دوست خوبم…
در اينجا، يک واسط گرافيکي و يا guiيي در متلب توليد شده که با استفاده از آن به طور اتوماتیک مي توانید…

تاخیر زمانی در بسیاری از سیستمها باعث کاهش عملکرد و یا حتی باعث ناپایداری میشود و بنابراین باید در مدل درنظر گرفته شود. سیستمهای مکانیکی، بیولوژیکی، شبکه های کامپیوتری، شبکه های عصبی و رباتیک جزو این دسته هستند.
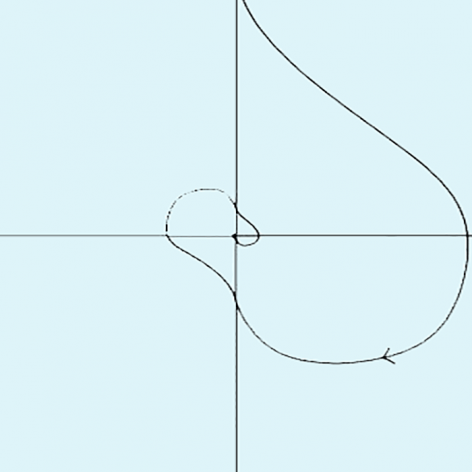
در سالهاي اخير، پژوهشگران از شاخه هاي مختلف علوم و مهندسي روش جديدي تحت عنوان نظريه آشوب براي توصيف پيچيدگي در طبيعت تدوين کرده و گسترش داده اند.
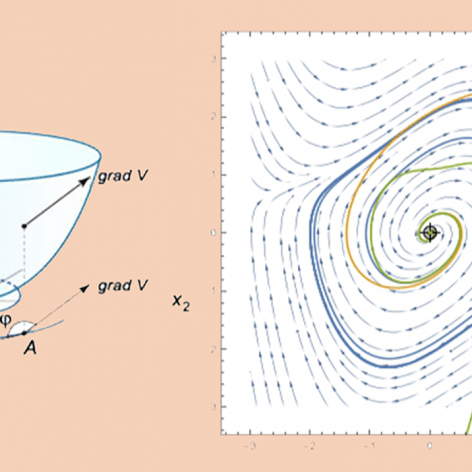
بسیاری از سیستمهای کنترل به صورت غیرخطی مدل میشوند تا با پدیده مدل شده تطابق کافی داشته باشد. به همین جهت سیستمهای…
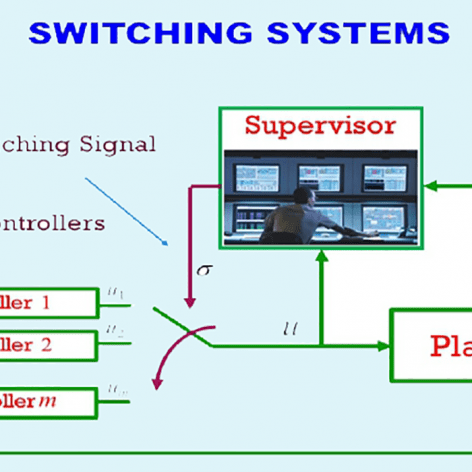
طی چند سال اخیر بحث سیستمهای هایبرید (Hybrid Systems) بسیار داغ شده است. این سیستم ها با قابلیت تلفیق حالت های پیوسته…
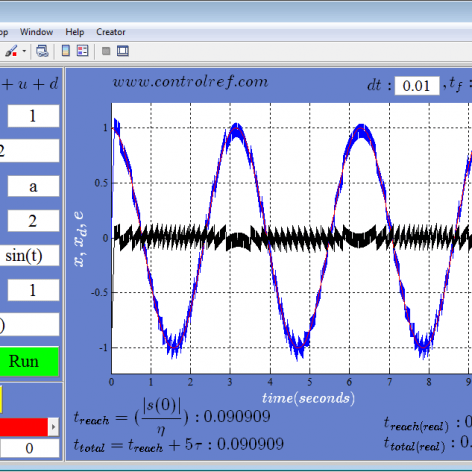
در این پست انواع مد لغزشی مرتبه بالاتر (HOSMC) قرار داده می شود. انواع مد لغزشی مرتبه بالاتر که قرار است به صورت فیلم آموزشی در این پست قرار داده شود به صورت زیر می باشند:مد لغزشی مرتبه دو،مد لغزشی دینامیک،مد لغزشی ترمینال
یکی از روشهایی که میشه باهاش مد لغزشی رو تا حدی بهبود داد و نواقص اون رو برطرف کرد مد لغزشی فازی (fuzzy sliding mode) هست. در این پست سعی کردیم روش فازی رو با مد لغزشی تلفیق کنیم.
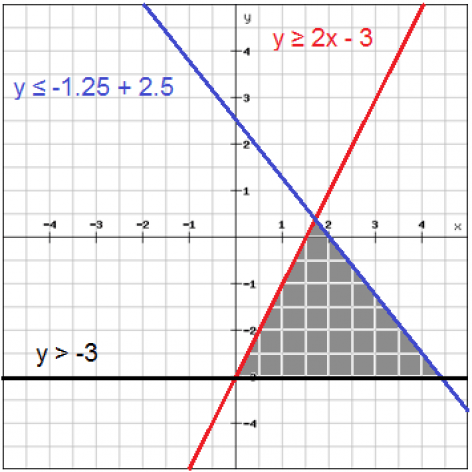
احتمالا برای شما هم پیش اومده که در یک مقاله یا کتاب به جایی رسیدید که باید یک ناتساوی ماتریسی خطی (یا LMI) رو حل کنید و در بدر دنبال یک نفر هستید تا در کوتاهترین زمان ممکن حل این نوع ناتساوی ها رو به شما یاد بدهد.

در این پست فیلم آموزش مد لغزشی طبق کتاب اسلوتین قرار داده میشود. کتاب اسلوتین رو اگه خونده باشید متوجه خواهید شد که بسیاری از مطالب این فصل گنگ هستند و نیاز به توضیحات بیشتر دارند.
- 1
- 2