 مرجع مهندسی كنترل | دانش با کیفیت در مرز علم
مرجع مهندسی كنترل | دانش با کیفیت در مرز علم
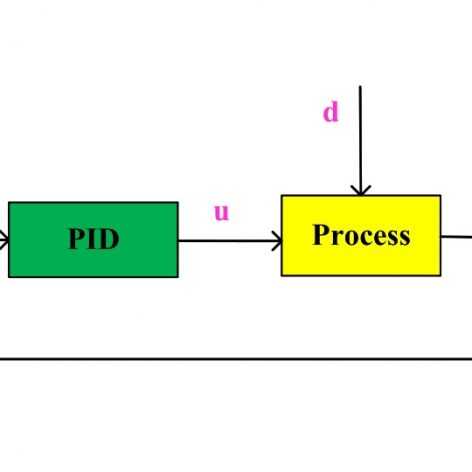
کنترل تناسبی-انتگرالی مشتقی یا PID یکی از اولین و رایجترین کنترل کننده های مورد استفاده در صنعت است. با توجه به خواص…
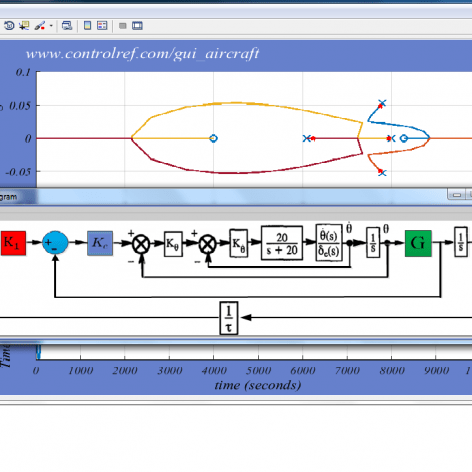
مباحثی که خدمت شما بزرگواران ارائه می شود، مربوط به کنترل هواپیما است که از پارت دوم از کتاب Roskam تدریس شده…
در اينجا، يک واسط گرافيکي و يا guiيي در متلب توليد شده که با استفاده از آن به طور اتوماتیک مي توانید…

در اينجا، يک واسط گرافيکي و يا guiيي در متلب توليد شده که با استفاده از آن براحتي مي توان يک کنترل کننده PID براي يک سيستم طراحي کرد که در پروژه هاي دانشجويي مي تواند بسيار کمک کننده باشد. اين gui ميتواند بدون استفاده از روش هاي کلاسيک، يک کنترل کننده PID تروتميز را در اختيار دانشجويان قرار دهد.

تاخیر زمانی در بسیاری از سیستمها باعث کاهش عملکرد و یا حتی باعث ناپایداری میشود و بنابراین باید در مدل درنظر گرفته شود. سیستمهای مکانیکی، بیولوژیکی، شبکه های کامپیوتری، شبکه های عصبی و رباتیک جزو این دسته هستند.
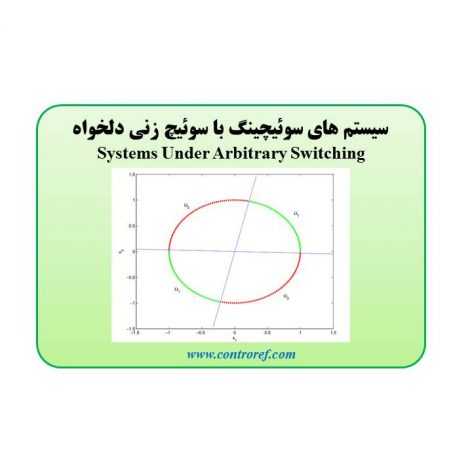
سیستم کلیدزن با کلیدزنی دلخواه (Systems under Arbitrary Switching) یکی از انواع سیستم های کلیدزن یا سوئیچینگ است که با تلفیق حالت های پیوسته و گسسته تبدیل دارای قابلیت مدل سازی، تحلیل و یا کنترل سیستم های پیچیده می باشد.
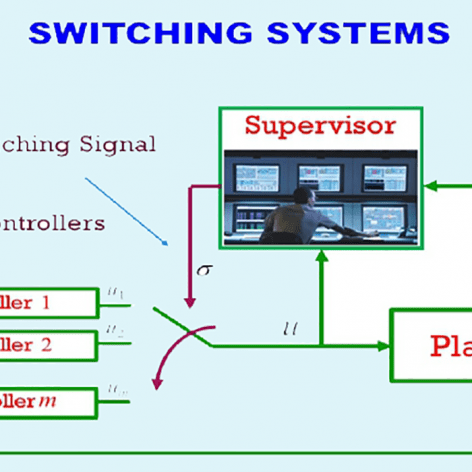
طی چند سال اخیر بحث سیستمهای هایبرید (Hybrid Systems) بسیار داغ شده است. این سیستم ها با قابلیت تلفیق حالت های پیوسته…
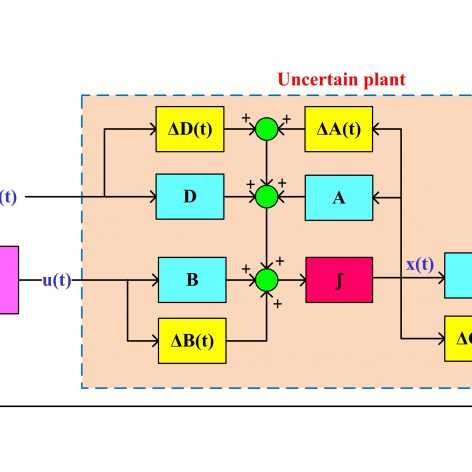
در این سری جلسات قرار است همه این عوامل یکجا در نظر گرفته شده و سیستمهای خطی دارای نامعینی و اغتشاش تنها با فیدبک تعدادی از حالتها کنترل شود و نامساویهای مربوط به این مساله استخراج شود.

در سری فیلمهای حاضر دقیقا این مشکل مدنظر قرار گرفته و هدف طراحی یک کنترلکننده مقاوم برای سیستمهای خطی تحت تاثیر اغتشاش فقط با استفاده از یک یا چند خروجی سیستم است.

یک کنترل کننده مقاوم دینامیک برای سیستمهای خطی تحت نامعینی پارامتری به گونهای طراحی میشود که فقط از خروجی (یا خروجی های) سیستم برای کنترل استفاده میکند و نیازی به تمام حالتها ندارد.

در این سری جلسات برای این سیستمها که کلی تر هم هستند، LMI های مورد نیاز برای بدست آوردن بهره کنترل کننده فیدبک حالت جهت حذف اثر نامعینی پارامتری و همچنین تضعیف اغتشاش محاسبه خواهند شد.
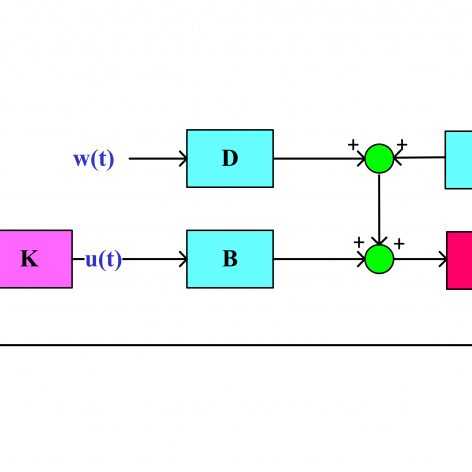
در بسیاری از سیستمهای کنترل سیگنالهای مزاحمی به نام اغتشاش وجود دارند که عملکرد حلقه بسته را تحت تاثیر قرار میدهند و عموما ما اطلاع چندانی از ماهیت آنها نداریم. تنها چیزی که از آنها میدانیم این است که دارای انرژی محدود هستند و بینهایت نیستند.

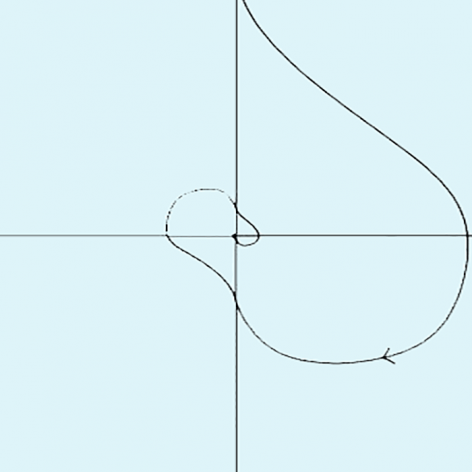
کنترل مقاوم به دلیل کاربردهای خیلی زیاد یکی از حوزه های مهم در تئوری کنترل محسوب میشود. عموما وقتی صحبت از کنترل مقاوم میشود همه به یاد ∞H و LFT و کلی ریاضیات پیچیده مثل تعریف نرم ها و فضاهای علمی تخیلی دیگر (مثل فضای هاردی) میافتند.
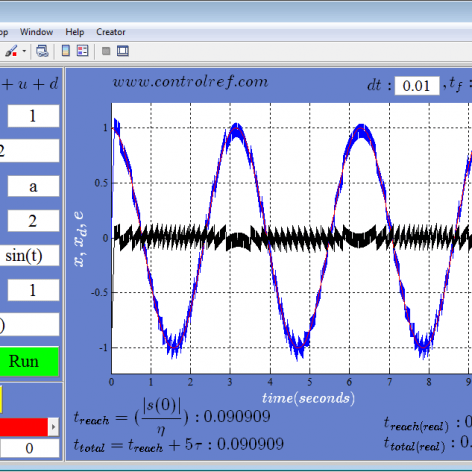
در این پست انواع مد لغزشی مرتبه بالاتر (HOSMC) قرار داده می شود. انواع مد لغزشی مرتبه بالاتر که قرار است به صورت فیلم آموزشی در این پست قرار داده شود به صورت زیر می باشند:مد لغزشی مرتبه دو،مد لغزشی دینامیک،مد لغزشی ترمینال
یکی از روشهایی که میشه باهاش مد لغزشی رو تا حدی بهبود داد و نواقص اون رو برطرف کرد مد لغزشی فازی (fuzzy sliding mode) هست. در این پست سعی کردیم روش فازی رو با مد لغزشی تلفیق کنیم.
- 1
- 2
